Miniature Shock Absorbers - BIBUS
Miniature Shock Absorbers - BIBUS
Miniature Shock Absorbers - BIBUS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
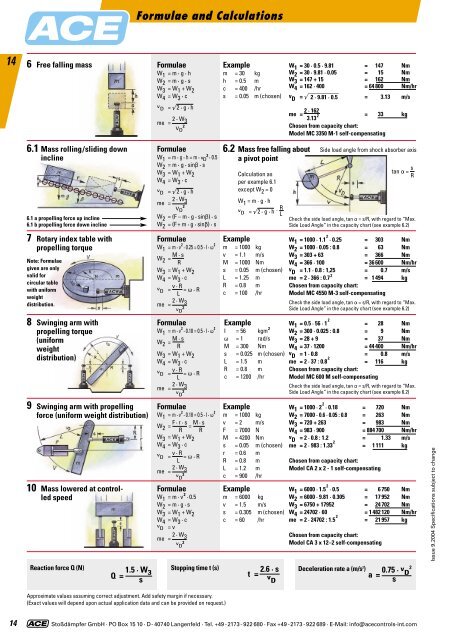
Formulae and Calculations146Free falling mass6.1 Mass rolling/sliding downincline6.1 a propelling force up incline6.1 b propelling force down inclineFormulaeW 1 = m · g · hW 2 = m · g · sW 3 = W 1 + W 2W 4 = W 3 · cv D = ö2 · g · hme = 2 · W 3V D2FormulaeW 1 = m · g · h = m · v D2 · 0.5W 2 = m · g · sinb · sW 3 = W 1 + W 2W 4 = W 3 · cv D = ö2 · g · hme = 2 · W 32V DW 2 = (F – m · g · sinb) · sW 2 = (F + m · g · sinb) · sExamplem = 30 kgh = 0.5 mc = 400 /hrs = 0.05 m (chosen)6.2Mass free falling abouta pivot pointCalculation asper example 6.1except W 2 = 0W 1 = m · g · hv D = ö2 · g · h . RLW 1 = 30 · 0.5 · 9.81 = 147 NmW 2 = 30 · 9.81 · 0.05 = 15 NmW 3 = 147 + 15 = 162 NmW 4 = 162 · 400 = 64 800 Nm/hrv D = öäääääää 2 · 9.81 · 0.5 = 3.13 m/sme = 2 · 162 3.13 2= 33 kgChosen from capacity chart:Model MC 3350 M-1 self-compensatingSide load angle from shock absorber axistan a = s RCheck the side load angle, tan a = s/R, with regard to “Max.Side Load Angle” in the capacity chart (see example 6.2)7 Rotary index table withpropelling torqueNote: Formulaegiven are onlyvalid forcircular tablewith uniformweightdistribution.8 Swinging arm withpropelling torque(uniformweightdistribution)FormulaeW 1 = m · v 2 · 0.25 = 0.5 · I · v 2W 2 = M · sRW 3 = W 1 + W 2W 4 = W 3 · cv D = v · R = v · RLme = 2 · W 3v 2 DFormulaeW 1 = m · v 2 · 0.18 = 0.5 · I · v 2W 2 = M · sRW 3 = W 1 + W 2W 4 = W 3 · cv v · R D = = v · RLme = 2 · W 3v 2 DExamplem = 1000 kgv = 1.1 m/sM = 1000 Nms = 0.05 m (chosen)L = 1.25 mR = 0.8 mc = 100 /hrExampleI = 56 kgm 2v = 1 rad/sM = 300 Nms = 0.025 m (chosen)L = 1.5 mR = 0.8 mc = 1200 /hrW 1 = 1000 · 1.1 2 · 0.25 = 303 NmW 2 = 1000 · 0.05 : 0.8 = 63 NmW 3 = 303 + 63 = 366 NmW 4 = 366 · 100 = 36 600 Nm/hrv D = 1.1 · 0.8 : 1,25 = 0.7 m/sme = 2 · 366 : 0.7 2 = 1 494 kgChosen from capacity chart:Model MC 4550 M-3 self-compensatingCheck the side load angle, tan a = s/R, with regard to “Max.Side Load Angle” in the capacity chart (see example 6.2)W 1 = 0.5 · 56 · 1 2 = 28 NmW 2 = 300 · 0.025 : 0.8 = 9 NmW 3 = 28 + 9 = 37 NmW 4 = 37 · 1200 = 44 400 Nm/hrv D = 1 · 0.8 = 0.8 m/sme = 2 · 37 : 0.8 2 = 116 kgChosen from capacity chart:Model MC 600 M self-compensatingCheck the side load angle, tan a = s/R, with regard to “Max.Side Load Angle” in the capacity chart (see example 6.2)9 Swinging arm with propellingforce (uniform weight distribution)10 Mass lowered at controlledspeedFormulaeW 1 = m · v 2 · 0.18 = 0.5 · I · v 2W 2 = F · r · s = M · sR RW 3 = W 1 + W 2W 4 = W 3 · cv v · R D = = v · RLme = 2 · W 3v 2 DFormulaeW 1 = m · v 2 · 0.5W 2 = m · g · sW 3 = W 1 + W 2W 4 = W 3 · cv D = vme = 2 · W 3v D2Examplem = 1000 kgv = 2 m/sF = 7000 NM = 4200 Nms = 0.05 m (chosen)r = 0.6 mR = 0.8 mL = 1.2 mc = 900 /hrExamplem = 6000 kgv = 1.5 m/ss = 0.305 m (chosen)c = 60 /hrW 1 = 1000 · 2 2 · 0.18 = 720 NmW 2 = 7000 · 0.6 · 0.05 : 0.8 = 263 NmW 3 = 720 + 263 = 983 NmW 4 = 983 · 900 = 884 700 Nm/hrv D = 2 · 0.8 : 1.2 = 1.33 m/sme = 2 · 983 : 1.33 2 = 1 111 kgChosen from capacity chart:Model CA 2 x 2 - 1 self-compensatingW 1 = 6000 · 1.5 2 · 0.5 = 6 750 NmW 2 = 6000 · 9.81 · 0.305 = 17 952 NmW 3 = 6750 + 17952 = 24 702 NmW 4 = 24702 · 60 = 1 482 120 Nm/hrme = 2 · 24702 : 1.5 2 = 21 957 kgChosen from capacity chart:Model CA 3 x 12–2 self-compensatingReaction force Q (N)Q= 1.5 · W Stopping time t (s)Deceleration rate a (m/s32 ) 0.75 · v 2t = 2.6 · sa= Dsv DsIssue 9.2004 Specifications subject to changeApproximate values assuming correct adjustment. Add safety margin if necessary.(Exact values will depend upon actual application data and can be provided on request.)14Stoßdämpfer GmbH · PO Box 15 10 · D- 40740 Langenfeld · Tel. +49 -2173 - 922 680 · Fax +49 -2173 - 922 689 · E-Mail: info@acecontrols-int.com