Research Statement Justin Malestein 1. Introduction My research ...
Research Statement Justin Malestein 1. Introduction My research ...
Research Statement Justin Malestein 1. Introduction My research ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Research</strong> <strong>Statement</strong><strong>Justin</strong> <strong>Malestein</strong><strong>1.</strong> <strong>Introduction</strong><strong>My</strong> <strong>research</strong> interests touch various areas – geometry/topology, algebra, and combinatorics – butmy work is centered around low-dimensional topology and discrete geometry. I am largely drawnto problems where one can use geometric/topological intuition or deepen geometric/toplogical understanding,and the objects I study allow ample opportunity for such investigations. At present,I study mapping class groups of surfaces (i.e. homeomorphisms up to isotopy of a surface), Torellisubgroups of mapping class groups, curves on surfaces, and bar-joint frameworks. I also enjoy solvingproblems with algebraic components or connections to algebra. Indeed, the following algebraicobjects have played a role in some of my papers/preprints: the derived and lower central series ofa group [24, 25, 26], free lie algebras [24], arithmetic groups [7], and torsion points of varieties [31].Additionally, my work on rigidity of frameworks is motivated, in part, by potential applications tounderstanding the physics of crystals (see e.g. [9, 13, 42, 50]).Some objects I would like to study more are symmetric mapping class groups. If Mod(Σ) isthe mapping class group of the surface Σ and G is some finite group in Homeo(Σ), then thesymmetric mapping class group consists of the mapping classes commuting with G, i.e. Mod(Σ) G .One natural question is: what is the image in Sp(2g, Z)? Clearly, it lies in Sp(2g, Z) G , but is it(virtually) Sp(2g, Z) G ? What is the “symmetric Torelli group”, i.e. what is the kernel of the mapMod(Σ) G → Sp(2g, Z) G ? How do the properties of the (nonsymmetric) Torelli group compare? Towhat extent do answers to the above depend on the group G?Part of my interest in these symmetric mapping groups derives from the variety of connectionsto other interesting problems for (nonsymmetric) mapping class groups and related objects. (Thisis not surprising as there is a virtual isomorphism Mod(Σ/G) → Mod(Σ) G [2].) In a slightlydifferent terminology, Grunewald, Larsen, Lubotzky, and I proved that Mod(Σ) G → Sp(2g, Z) Gis virtually surjective for a large class of groups G with some restrictions on the group action[7]. The major consequence is that the mapping class group, in any genus, has a rich collectionof (virtual) arithmetic quotients, including arithmetic subgroups of Lie groups of arbitrarily highdimension. In [27], Souto and I used these groups for G = Z/2Z to show that pseudo-Anosovclasses are “exponentially generic” in the Torelli group. There are also applications to the questionof whether Mod(Σ) virtually surjects onto Z. Some details are given in §2. In §3, I discuss potentialapplications for understanding the isometry group of random 3-manifolds. In the same section, Ialso suggest ways to understand other properties of 3-manifolds (by using other tools).In the field of rigidity, my main focus has been understanding generic rigidity of bar-joint frameworks.One project, which I plan to continue, is characterizing the generic rigidity of planar frameworkswith symmetry. Theran and I in [28, 29, 32], and some others (e.g. [12, 40, 41]) have madeconsiderable progress recently, but various problems remain. Additionally, I would like to produce,so far as possible, a uniform theorem and proof which would cover all possible symmetry groups.At present, the various theorems and proofs are related, but, for instance, it is known that the easygeneralization of the conditions in [12, 28, 29, 32] does not give the right conditions for rigidity whenthe symmetry group is an even dihedral group. I am also curious how these results in the Euclideanplane compare to the Hyperbolic plane. Specifically, what are the right combinatorial conditions forrigidity of a generic framework in H 2 with symmetry under a PSL(2, R)-lattice? Does hyperbolicgeometry produce fundamentally different behavior? Apart from symmetric framework, I wouldlike to study other rigidity problems involving random graphs, expander graphs, and area/volumeof simplicial complexes.1
22. Symmetric mapping class groupsIn a recent paper [7], Grunewald, Lubotzky, Larsen and myself show that the mapping classgroup of a closed surface has a rich collection of (virtual) arithmetic quotients. Specifically, weshow that for any finite group G with fewer than g generators and irreducible representation r ofG, there is a finite index subgroup Γ G < Mod(Σ g ), an arithmetic group Ω G,r and a representationρ G,r : Γ G → Ω G,r with finite index image. Concretely, some Ω G,r obtained as virtual quotients are,for all n, Sp(2n(g − 1), Z), arithmetic groups of type SO(2n(g − 1), 2n(g − 1)), and Sp(4n(g − 1), O)(resp. SU(n(g − 1), n(g − 1), O)) where O is the ring of integers in Q(ζ) + (resp. Q(ζ)) and ζ is aroot of unity.The representations we use can be described as follows. Given any Galois cover ˆΣ → Σ with deckgroup G, we have Σ = ˆΣ/G, and as mentioned in the introduction a map l : Γ G → Mod(ˆΣ) G whereΓ G < Mod(Σ) is a finite index subgroup. One can then compose by the natural representationΨ : Mod(ˆΣ) G → Sp(2g ′ , Z) G . From representation theory, H 1 (ˆΣ, Q) decomposes as a Q[G]-moduleinto a direct sum of isotypic components, one for each irreducible representation r of G. There isa corresponding decomposition Sp(2g ′ , Z) G ∼ = ∏ r Ω G,r. The representation ρ G,r is the projectionto Ω G,r after applying l. The paper [7] mentioned above studies the representation in the casewhere the cover extends to a cover of the handlebody and is a “stack of pancakes” on some toroidalsubsurface. (In the paper, such covers are are described via the terminology “φ-redundant”.)These representations have also been studied for various covers by myself and Souto [27], Lubotzkyand Meiri [19], Looijenga [18], and Putman and Wieland [36]. Of particular interest is [36]. Roughlyspeaking, Putman–Wieland prove that Mod(Σ) does not virtually surject onto Z if and only if l(Γ G )has no finite orbits in H 1 (ˆΣ, Z) for all lifting maps l for characteristic covers. (Their theorem alsorequires one to analyze branched covers.)Problem: Determine the (virtual) image of ρ G,r for arbitrary Galois or characteristic covers.This problem is a serious project itself. While [7] is a significant advance, it is unclear howto remove either topological assumption on the cover. A couple possibilities would be to: tryto bootstrap the results of [7] to all covers, or adapt techniques from [8] which investigates theanalogous problem for Aut(F n ). Notice also that to show Mod(Σ) does not virtually surject to Z,it is sufficient to show the image under ρ G,r is Zariski dense.The above and my various previous papers involving the Torelli group [24, 25, 27] suggest thestudy of the kernel of Mod(Σ) G → Sp(2g, Z) G , i.e. the symmetric Torelli group I(Σ) G . Recently,there have been several papers on the hyperelliptic Torelli group, which is the group I(Σ) G whereG = Z/2Z acts by the hyperelliptic involution [3, 4, 5]. These results suggest the following problemsmay be tractable more generally.Problem: Find generators for I(Σ) G . Compute the cohomology/cohomological dimension ofI(Σ) G .As observed in [5], the image of I(Σ) G under the Johnson homomorphism τ : I(Σ) → ∧3 H/H(where H = H 1 (Σ, Z)) must lie in the G-fixed subspace since τ is Mod(Σ)-equivariant. For the hyperellipticTorelli group, this implies the image is necessarily trivial, but for more general group actionsthis need not follow. Moreover, in the cases where Mod(Σ) G virtually surjects onto Sp(2g, Z) G(which is known for abelian G and likely holds more generally), τ(I(Σ) G ) has a module structureover (a finite index subgroup of) Sp(2g, Z) G . Johnson showed that τ(I(Σ)) captures precisely thenon-torsion part of H 1 (I(Σ), Z) [11], so a natural question is whether this holds for I(Σ) G .Problem: Determine τ(I(Σ) G ) and the Sp(2g, Z) G -module structure. Determine the non-torsionpart of H 1 (I(Σ) G , Z).
3. Random constructions of 3-manifoldsIn [6], Dunfield and Thurston discuss various models for random 3-manifolds and use the modelfrom random Heegard splittings to investigate the virtual Haken conjecture and homology of 3-manifolds. In this model, a 3-manifold is constructed by gluing a handlebody H to a copy of itselfH ′ along the boundary via a random element f of Mod(Σ). Here, a random element of Mod(Σ)is obtained from a random walk relative to some fixed finite generating set. They also conjecturethat generic 3-manifolds are hyperbolic and that expected volume grows linearly with the lengthof the random walk. One natural question is:Question: What are the properties of a random 3-manifold?The theory of random walks in Mod(Σ) has developed significantly in recent years. The studybegan with Rivin and Maher. Rivin showed that the probability that a random walk of length n inMod(Σ) ended at a pseudo-Anosov class was 1 − o(e n ) [37, 38, 39]. Maher initially showed that theprobability of landing on a pseudo-Anosov tended towards 1 without any exponential estimate for arandom walk in any “non-elementary” finitely generated subgroup of Mod(Σ) [22]. Then, Souto andmyself, and independently Lubotzky and Meiri, proved pseudo-Anosov classes were “exponentiallygeneric” in I(Σ) a la Rivin [27, 19]. The basic strategy was to first prove a sufficient condition forbeing pseudo-Anosov, based on ρ G,r for G = Z/2Z. This combined with knowledge of the image ofρ G,r and Rivin’s machinery yielded the result. Subsequently, Maher has shown that pseudo-Anosovclasses are “exponentially generic” for any non-elementary finitely generated subgroup of Mod(Σ)[23], that the translation length in the curve complex of a random element tends to infinity [23],and that random Heegard splittings are hyperbolic with probability tending to 1 [20].Aside from understanding random 3-manifolds, Dunfield and Thurston suggested that by usingrandom constructions, one could construct 3-manifolds with prescribed properties. For example,one might try to prescribe Isom(M 3 ). Understanding this is essentially understanding whethera finite group G acts on M 3 by diffeomorphisms. If first we consider group actions preservingthe splitting surface Σ, then such a group G acts on H ∪ f H ′ if and only if there is an embeddingι : G → Mod(Σ) such that ι(G) and fι(G)f −1 lie in the handlebody group Map(H). Recall that theimage of Map(H) in Sp(2g, Z) is necessarily parabolic, so even homologically the above conditionseems unlikely to hold since Rivin showed random elements in Sp(2g, Z) act irreducibly [38]. Ofcourse, one must worry about group actions that do not preserve this Heegaard splitting.Problem: Prove that finite groups do not act nontrivially on a generic 3-manifold.If we care only to construct 3-manifolds without finite group actions, then a result of Namazi–Souto and Scharlemann–Tomova provides one possible step towards ruling out group actions whichdo not preserve the given Heegaard splitting [34][Theorem <strong>1.</strong>8] [43]. Specifically, their theorem saysthat if the gluing map is a sufficiently high power of a pseudo-Anosov, which is generic in a differentsense, then the splitting is the unique minimal one up to isotopy. To construct 3-manifolds witha prescribed group acting on it, one can perform a random walk in an symmetric mapping classgroup Mod(Σ) G for which we understand the image in Sp(2g, Z) G via [7].Problem: Construct M 3 with prescribed group actions or isometry groups.Note that it is already known that each finite group G is the isometry group of some hyperbolic3-manifold [1, 16]. However, with random methods one might show that a prescribed isometrygroup can coexist with various other properties. Here are some other properties with possible approachesfor obtaining them with random constructions.Prescribed first Betti number: Dunfield and Thurston already showed that a generic gluing inMod(Σ) typically has finite H 1 using the fact that H 1 (H ∪ f H ′ , Z) ∼ = H 1 (∂H, Z)/〈J, f ∗ (J)〉 whereJ is an isotropic subspace of half the rank [6]. Using subgroups of Mod(Σ) with reducible image in3
4Sp(2g, Z), it should be straightforward to produce all possible β 1 .Arbitrarily large volume: One can try to adapt Maher’s methods to the pants complex. Accordingto an announced result of Brock–Souto, the volume of H ∪ f H ′ can be determined withina certain range by distances between certain natural subsets in the pants complex of Σ [47].Prescribed Heegaard genus: One might use the result of Namazi–Souto mentioned above.Hyperbolicity: Generic 3-manifolds are hyperbolic due to Maher [21].Prescribed Casson invariant of a homology 3-sphere: According to Morita, for elementsf ∈ K g ⊂ Mod(Σ), the Casson invariant of H ∪ ϕ◦f H ′ defines a homomorphism λ ∗ : K g → Z [33].Here, ϕ is some fixed mapping class whose gluing gives the 3-sphere.4. Combinatorial RigidityThe field of combinatorial rigidity (or just rigidity) is the study of the rigidity of discrete combinatorialobjects with geometric constraints. I will discuss only “local rigidity” (rigidity for short)although global, universal and affine rigidity are interesting topics as well. Let’s consider localrigidity of bar-joint frameworks. A bar-joint framework G(p) in E d (Euclidean d-space) is a graphG with an immersion in E d with geodesic (straight-line) edges where the immersion is describedby vertex positions p : V (G) → E d . If the framework admits a continuous motion which preservesedge lengths and is not induced by an ambient isometry, then it is (locally) rigid and otherwise(locally) flexible.One key property of local rigidity for bar-joint frameworks is that it is a generic property: awayfrom a measure 0 set, rigidity is determined by the graph G alone. Moreover, on a fixed vertexset, the graphs which are minimally rigid generically, i.e. rigid but flexible if any edge is removed,form a matroid on the set of all possible edges. (A matroid is a combinatorial generalization of thedependence/independence relation of vectors in a vector space.) For bar-joint frameworks, theseproperties follow from the fact that generically, local and infinitesimal rigidity coincide. Intuitively,an infinitesimally rigid framework is one with no motions preserving lengths up to first order (asidefrom rigid motions of the ambient space). More precisely, if G(p) is a framework of m edges andn vertices, then an infinitesimal motion is the kernel of an associated m × dn rigidity matrix, andG(p) is infinitesimally rigid if the matrix has the maximum possible rank for n vertices.The central problem, then, is to combinatorially describe the generically minimally rigid frameworks.The archetypal such theorem is Laman’s theorem characterizing generic rigidity for planarbar-joint frameworks via a sparsity condition. He proved that a generic framework G(p) is minimallyrigid in E 2 if and only if G has n vertices, m = 2n − 3 edges and every subgraph G ′ on n ′vertices and m ′ edges satisfies m ′ ≤ 2n ′ − 3 [17]. This theorem motivated others (including myselfin some instances) to discover analogous theorems for body-bar frameworks [48], panel-hingeframeworks [15], direction–length frameworks [46], and planar bar-joint frameworks with enforcedsymmetry [32, 28, 29, 40, 41, 12]. Generically rigid frameworks have also been characterized byinductive constructions (e.g. [40, 12, 17]) or graph decompositions (e.g. [48]).4.<strong>1.</strong> Bar-joint frameworks in higher dimensions. Note that Laman’s theorem is for dimension2 only. It has yet to be generalized to 3 dimensions or higher, and the analogous sparsity conditionsare necessary but fail to be sufficient for generic rigidity. Moreover, none of the existing methodsseem to give traction on this problem, so one might study instead the generic rigidity of randomgraphs to gain some understanding. Theran, has proven, jointly with others, theorems on therigidity of Erdos-Renyi random graphs for dimension 2 [14] and now higher dimensions [49]. Ipropose the following problem.Problem: Prove or disprove that a random 2d-regular graph is generically rigid in dimension dwith high probability.
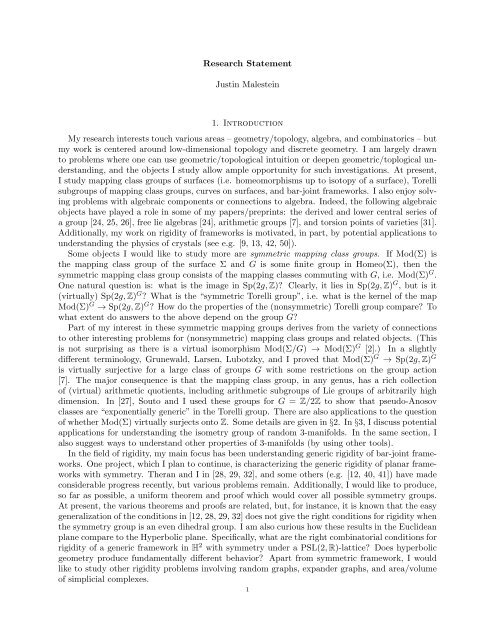
Note that random 2d-regular graphs are good expanders. It would be interesting itself to determineif good expanders must be generically rigid.4.2. Symmetric planar frameworks. A symmetric planar framework G(p) consists of a graphG with a group Γ acting on it and an equivariant pair (p, Φ) of a function p : V (G) → E 2 anddiscrete faithful representation Φ : Γ → Isom(E 2 ). (Of course, one can replace E 2 with other spacesas one likes.) Note that Φ is allowed to change continuously in a motion of the framework. SeeFigure <strong>1.</strong> (We restrict attention to d = 2, since characterizing generic rigidity of higher dimensionalsymmetric frameworks is no easier than for nonsymmetric frameworks.) In this setting, there aregenerally two kinds of Laman-like problems.Problem: Determine when a generic symmetric framework has nontrivial symmetric motions (the“forced symmetry” setting). Determine when a generic symmetric framework has any nontrivialmotions, symmetric or otherwise (the “incidental symmetry” setting).The joint work of Theran and myself has pioneered much of the generic rigidity theory in theforced symmetry setting. To date, we have proven Laman-like theorems in dimension 2 when Γis cyclic giving either rotational or reflective symmetry [28], when Γ = Z 2 [32], or when Γ is anyorientation-preserving crystallographic group [29]. Recently, Jordan-Kaszanitsky-Tanigawa proveda Laman-like theorem for dihedral Γ where the order is 2n with n odd [12]. Ross, Ross–Nixon, and<strong>Malestein</strong>–Theran have also proved theorems for periodic frameworks with various restrictions onΦ [30, 40, 41].Problem: Characterize generic “forced symmetry” rigidity of planar bar-joint frameworks withorientation-reversing symmetries in the remaining unsolved cases.Periodic ultrarigidity: As mentioned above, Theran and I characterized generic rigidity of planarperiodic frameworks in the forced symmetry setting. However, from the perspective of physicalapplications, the “incidental symmetry” setting is more natural. While a crystal is periodic, thereis no a priori reason that it must move periodically. However, a paper of Owen–Power shows thatthe theory for rigidity of infinite frameworks is fraught with many difficulties [35].A compromise between the two perspectives is so-called periodic “ultrarigidity”. Suppose onehas a periodic framework G(p, Φ). Instead of allowing only motions symmetric with respect to thewhole lattice Z 2 , we also allow motions respecting only the symmetry from finite index subgroupsof Z 2 . See e.g. Figure <strong>1.</strong> A framework is ultrarigid if all such motions are rigid motions of E 2 .5(a) (b) (c)Figure <strong>1.</strong> (a) and (b): A flexible one degree of freedom periodic framework with a motionthat changes the lattice representation; (a) and (c): an “ultramotion”, i.e. a motionsymmetric relative to an index 2 sublattice but not the whole lattice.Problem: Characterize which periodic frameworks are generically infinitesimally ultrarigid.
6In an upcoming preprint [31], Theran and I give a partial solution to this problem. Particularly,we characterize rigidity generically for those frameworks G(p) for which the quotient graph G/Z 2has n vertices and m = 2n+1 edges, the minimum possible for rigidity. This still leaves the problemopen in general since, here, minimal rigidity does not imply that G/Z 2 has the minimum possiblenumber of edges.Note the qualifier “infinitesimally”. Unlike other contexts, the usual arguments that rigidity andinfinitesimal rigidity coincide generically do not hold for ultrarigidity.Question: Does rigidity and infinitesimal rigidity coincide generically?Moreover, here, one needs infinitely many rigidity matrices, one for each finite index subgroup.Thus, unlike most situations, the following are nontrivial problems.Problem: Find a finite time algorithm for determining infinitesimal ultrarigidity. Determine ifsmall perturbations of infinitesimally ultrarigid frameworks remain ultrarigid.In the same upcoming preprint [31], Theran and I produce just such a finite time algorithmwhich we believe is practical in low dimensions. In the course of developing the algorithm we alsoprove a theoretical result on torsion points in varieties which may be of independent interest.5. Frameworks with PSL(2, R)-symmetry and length spectra of hyperbolic surfacesI am interested in the rigidity of (forced) symmetric frameworks in H 2 with symmetry given bysome cocompact lattice Γ in PSL(2, R) = Isom(H 2 ). One motivation is to compare to periodic andcrystallographic frameworks in the Euclidean plane. Indeed, the sparsity counts of [32, 29] can bestated in a general way which makes sense in this context. However, I expect the characterization ofrigidity to be more complex. One indication for this is that existing techniques for proving Lamanliketheorems do not easily transfer. One simpler problem would be to study the frameworks forwhich the quotient graph G/Γ is embedded in the quotient surface H 2 /φ(Γ). Then, one can moreeasily apply geometric arguments.Problem: Characterize when PSL(2, R)-symmetric frameworks are generically rigid in the forcedsymmetry setting for general frameworks or those which embed in the quotient surface.Recall that the graph as well as the representation φ : Γ → Isom is allowed to vary. Thus, for agenerically rigid graph in these contexts, the lengths of edges determines (locally) the hyperbolicmetric. This is similar to a problem that has already received a fair amount of study already.Namely, for what finite collection of (isotopy classes of) simple closed curves γ 1 , . . . , γ m on a closedsurface Σ, do the lengths l γi : T (Σ) → R + determine the point in Teichmüller space? Although thedimension of T (Σ) is 6g − 6, it is known that the minimal possible number of curves to completelydetermine a metric is 6g − 5 [44, 10]. Locally, 6g − 6 suffice [45].Problem: Adapt the techniques for local and global rigidity of frameworks to give necessary orsufficient conditions for collections of simple closed curves to determine a hyperbolic metric (locallyor globally).References[1] Mikhail Belolipetsky and Alexander Lubotzky. Finite groups and hyperbolic manifolds. Invent. Math.,162(3):459–472, 2005.[2] Joan S. Birman and Hugh M. Hilden. On isotopies of homeomorphisms of Riemann surfaces. Ann. of Math. (2),97:424–439, 1973.[3] Tara Brendle, Leah Childers, and Dan Margalit. Cohomology of the hyperelliptic Torelli group. Israel J. Math.,195(2):613–630, 2013.[4] Tara Brendle and Dan Margalit. Point pushing, homology, and the hyperelliptic involution. Michigan Math. J.,62(3):451–473, 2013.[5] Tara Brendle, Dan Margalit, and Andrew Putman. Generators for the hyperelliptic torelli group and the kernelof the burau representation at t = ?<strong>1.</strong> Preprint, arXiv.org:121<strong>1.</strong>4018.
[6] Nathan M. Dunfield and William P. Thurston. Finite covers of random 3-manifolds. Invent. Math., 166(3):457–521, 2006.[7] Fritz Grunewald, Michael Larsen, Alexander Lubotzky, and <strong>Justin</strong> <strong>Malestein</strong>. Arithmetic quotients of the mappingclass group. Preprint, arXiv:1307.2593.[8] Fritz Grunewald and Alexander Lubotzky. Linear representations of the automorphism group of a free group.Geom. Funct. Anal., 18(5):1564–1608, 2009.[9] S. D. Guest and J. W. Hutchinson. On the determinacy of repetitive structures. J. Mech. Phys. Solids, 51(3):383–391, 2003.[10] Ursula Hamenstädt. Parametrizations of Teichmüller space and its Thurston boundary. In Geometric analysisand nonlinear partial differential equations, pages 81–88. Springer, Berlin, 2003.[11] Dennis Johnson. The structure of the Torelli group. III. The abelianization of T . Topology, 24(2):127–144, 1985.[12] Tibor Jordán, Viktória Kaszanitzky, and Shin-ichi Tanigawa. Gain-sparsity and symmetry-forced rigidity in theplane. Technical Report TR-2012-17, Egerváry <strong>Research</strong> Group, Budapest, 2012. www.cs.elte.hu/egres.[13] V. Kapko, M. M. J. Treacy, M. F. Thorpe, and S. D. Guest. On the collapse of locally isostatic networks. Proc.R. Soc. Lond. Ser. A Math. Phys. Eng. Sci., 465(2111):3517–3530, 2009.[14] Shiva Prasad Kasiviswanathan, Cristopher Moore, and Louis Theran. The rigidity transition in random graphs.In Proceedings of the Twenty-Second Annual ACM-SIAM Symposium on Discrete Algorithms, pages 1237–1252,Philadelphia, PA, 201<strong>1.</strong> SIAM.[15] Naoki Katoh and Shin-ichi Tanigawa. A proof of the molecular conjecture. Discrete Comput. Geom., 45(4):647–700, 201<strong>1.</strong>[16] Sadayoshi Kojima. Isometry transformations of hyperbolic 3-manifolds. Topology Appl., 29(3):297–307, 1988.[17] G. Laman. On graphs and rigidity of plane skeletal structures. J. Engrg. Math., 4:331–340, 1970.[18] Eduard Looijenga. Prym representations of mapping class groups. Geom. Dedicata, 64(1):69–83, 1997.[19] Alexander Lubotzky and Chen Meiri. Sieve methods in group theory II: the mapping class group. Geom. Dedicata,159:327–336, 2012.[20] Joseph Maher. Random Heegaard splittings. J. Topol., 3(4):997–1025, 2010.[21] Joseph Maher. Random Heegaard splittings. J. Topol., 3(4):997–1025, 2010.[22] Joseph Maher. Random walks on the mapping class group. Duke Math. J., 156(3):429–468, 201<strong>1.</strong>[23] Joseph Maher. Exponential decay in the mapping class group. J. Lond. Math. Soc. (2), 86(2):366–386, 2012.[24] <strong>Justin</strong> <strong>Malestein</strong>. Pseudo-Anosov homeomorphisms and the lower central series of a surface group. Algebr. Geom.Topol., 7:1921–1948, 2007.[25] <strong>Justin</strong> <strong>Malestein</strong> and Andrew Putman. Pseudo-anosov dilatations and the johnson filtration. Preprint,arXiv:1307.6226.[26] <strong>Justin</strong> <strong>Malestein</strong> and Andrew Putman. On the self-intersections of curves deep in the lower central series of asurface group. Geom. Dedicata, 149:73–84, 2010.[27] <strong>Justin</strong> <strong>Malestein</strong> and Juan Souto. On genericity of pseudo-Anosovs in the Torelli group. Int. Math. Res. Not.IMRN, (6):1434–1449, 2013.[28] <strong>Justin</strong> <strong>Malestein</strong> and Louis Theran. Frameworks with forced symmetry i: Reflections and rotations. Preprint,arXiv:1304.0398.[29] <strong>Justin</strong> <strong>Malestein</strong> and Louis Theran. Frameworks with forced symmetry ii: Orientation-preserving crystallographicgroups. Geom. Ded. to appear.[30] <strong>Justin</strong> <strong>Malestein</strong> and Louis Theran. Generic rigidity with forced symmetry and sparse colored graphs. Preprint,arXiv.org:1203.0772.[31] <strong>Justin</strong> <strong>Malestein</strong> and Louis Theran. Working title: Ultrarigidity of periodic frameworks. in preparation.[32] <strong>Justin</strong> <strong>Malestein</strong> and Louis Theran. Generic combinatorial rigidity of periodic frameworks. Adv. Math., 233:291–331, 2013.[33] Shigeyuki Morita. Casson invariant, signature defect of framed manifolds and the secondary characteristic classesof surface bundles. J. Differential Geom., 47(3):560–599, 1997.[34] Hossein Namazi and Juan Souto. Heegaard splittings and pseudo-Anosov maps. Geom. Funct. Anal., 19(4):1195–1228, 2009.[35] J. C. Owen and S. C. Power. Infinite bar-joint frameworks, crystals and operator theory. New York J. Math.,17:445–490, 201<strong>1.</strong>[36] A. Putman and B. Wieland. Abelian quotients of subgroups of the mapping class group and higher prymrepresentations. J. London Math. Soc. (2), 88(1):79–96, 2013.[37] Igor Rivin. Walks on groups, counting reducible matrices, polynomials, and surface and free group automorphisms.Duke Math. J., 142(2):353–379, 2008.[38] Igor Rivin. Walks on graphs and lattices—effective bounds and applications. Forum Math., 21(4):673–685, 2009.[39] Igor Rivin. Zariski density and genericity. Int. Math. Res. Not. IMRN, (19):3649–3657, 2010.[40] Elissa Ross. The rigidity of periodic frameworks as graphs on a fixed torus. Preprint, arXiv.org:1202.6652.7
8[41] Elissa Ross and Anthony Nixon. Periodic rigidity on a variable torus using inductive constructions. Preprint,arXiv.org:1204.1349.[42] A. Sartbaeva, S. Wells, M. Treacy, and M. Thorpe. The flexibility window in zeolites. Nature Materials, 5:962–965, 2006.[43] Martin Scharlemann and Maggy Tomova. Alternate Heegaard genus bounds distance. Geom. Topol., 10:593–617(electronic), 2006.[44] Paul Schmutz. Die Parametrisierung des Teichmüllerraumes durch geodätische Längenfunktionen. Comment.Math. Helv., 68(2):278–288, 1993.[45] Mika Seppälä and Tuomas Sorvali. On geometric parametrization of Teichmüller spaces. Ann. Acad. Sci. Fenn.Ser. A I Math., 10:515–526, 1985.[46] Brigitte Servatius and Walter Whiteley. Constraining plane configurations in computer-aided design: combinatoricsof directions and lengths. SIAM J. Discrete Math., 12(1):136–153 (electronic), 1999.[47] Juan Souto. Geometry, Heegaard splittings and rank of the fundamental group of hyperbolic 3-manifolds. InWorkshop on Heegaard Splittings, volume 12 of Geom. Topol. Monogr., pages 351–399. Geom. Topol. Publ.,Coventry, 2007.[48] Tiong-Seng Tay. Rigidity of multigraphs. I. Linking rigid bodies in n-space. J. Combin. Theory Ser. B, 36(1):95–112, 1984.[49] Louis Theran. private communication.[50] M. Treacy, I. Rivin, E. Balkovsky, and K. Randall. Enumeration of periodic tetrahedral frameworks. ii. polynodalgraphs. Microporous and Mesoporous Materials, 74:121–132, 2004.