METR4202 -- Robotics Tutorial 4 â Week 4: Solutions
METR4202 -- Robotics Tutorial 4 â Week 4: Solutions
METR4202 -- Robotics Tutorial 4 â Week 4: Solutions

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
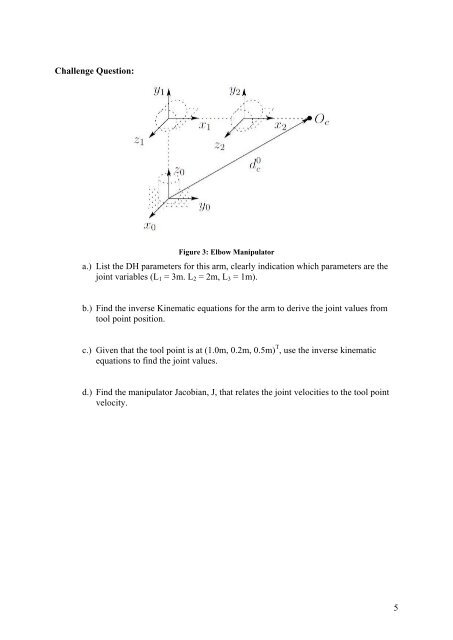
Challenge Question:Figure 3: Elbow Manipulatora.) List the DH parameters for this arm, clearly indication which parameters are thejoint variables (L 1 = 3m. L 2 = 2m, L 3 = 1m).b.) Find the inverse Kinematic equations for the arm to derive the joint values fromtool point position.c.) Given that the tool point is at (1.0m, 0.2m, 0.5m) T , use the inverse kinematicequations to find the joint values.d.) Find the manipulator Jacobian, J, that relates the joint velocities to the tool pointvelocity.5