

Airborne Wind Energy Conference 2017 Book of Abstracts

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Modeling and Control <strong>of</strong> Magnus Effect-Based AWE Systems<br />
Yashank Gupta 1 , Jonathan Dumon 1 , Ahmad Hably 1,2<br />
1 GIPSA-Lab<br />
2 Grenoble INP<br />
At GIPSA-lab, EOFLY is a multi-disciplinary research group<br />
working on the development <strong>of</strong> airborne wind energy<br />
systems, drones, and conventional wind turbines [1].<br />
Our current research work is focused on the modeling<br />
and control <strong>of</strong> Magnus effect-based AWE systems. In our<br />
approach, a rotating cylinder designed as an aerostat is<br />
used to drive a ground-based generator. Our choice <strong>of</strong><br />
Magnus based aerostat stems from various factors such<br />
as high lift coefficient, naturally robust and stable design,<br />
and lighter than air capabilities. A study about experimental<br />
data available on Magnus cylinders has been<br />
done in order validate the aerodynamic model [2].<br />
160<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
Z (m)<br />
20<br />
X (m)<br />
0<br />
0 50 100 150 200 250 300<br />
Y (m)<br />
-200<br />
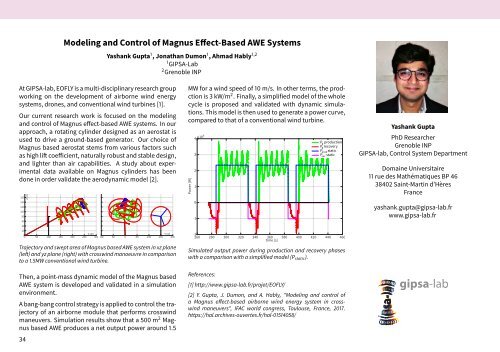
Trajectory and swept area <strong>of</strong> Magnus based AWE system in xz plane<br />
(left) and yz plane (right) with crosswind manoeuvre in comparison<br />
to a 1.5MW conventional wind turbine.<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
MW for a wind speed <strong>of</strong> 10 m/s. In other terms, the prodction<br />
is 3 kW/m 2 . Finally, a simplified model <strong>of</strong> the whole<br />
cycle is proposed and validated with dynamic simulations.<br />
This model is then used to generate a power curve,<br />
compared to that <strong>of</strong> a conventional wind turbine.<br />
Power [W]<br />
4<br />
x10 6 P g production<br />
P g recovery<br />
P prod static<br />
3<br />
P rec static<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
260 280 300 320 340 360 380 400 420 440 460<br />
time [s]<br />
Simulated output power during production and recovery phases<br />
with a comparison with a simplified model (P static ).<br />
Yashank Gupta<br />
PhD Researcher<br />
Grenoble INP<br />
GIPSA-lab, Control System Department<br />
Domaine Universitaire<br />
11 rue des Mathématiques BP 46<br />
38402 Saint-Martin d’Hères<br />
France<br />
yashank.gupta@gipsa-lab.fr<br />
www.gipsa-lab.fr<br />
Then, a point-mass dynamic model <strong>of</strong> the Magnus based<br />
AWE system is developed and validated in a simulation<br />
environment.<br />
A bang-bang control strategy is applied to control the trajectory<br />
<strong>of</strong> an airborne module that performs crosswind<br />
maneuvers. Simulation results show that a 500 m 2 Magnus<br />
based AWE produces a net output power around 1.5<br />
34<br />
References:<br />
[1] http://www.gipsa-lab.fr/projet/EOFLY/<br />
[2] Y. Gupta, J. Dumon, and A. Hably, "Modeling and control <strong>of</strong><br />
a Magnus effect-based airborne wind energy system in crosswind<br />
maneuvers", IFAC world congress, Toulouse, France, <strong>2017</strong>.<br />
https://hal.archives-ouvertes.fr/hal-01514058/<br />
b bbbb<br />
gggipsa<br />
gipsa-lab ggipsa-lab ggg ii<br />
ab<br />
bbbbb<br />
gipsa-labb<br />
gipsa-lab<br />
g bb b b<br />
gipsa-lab b b bb<br />
a b bbb b bbb<br />
gipsa<br />
ggips l b<br />
gipsa-lab<br />
aaa<br />
bb<br />
ggipsa gggipsa-labb<br />
l b bb<br />
gip