Optimized control of the electrical machine - hofer powertrain GmbH
Optimized control of the electrical machine - hofer powertrain GmbH
Optimized control of the electrical machine - hofer powertrain GmbH

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
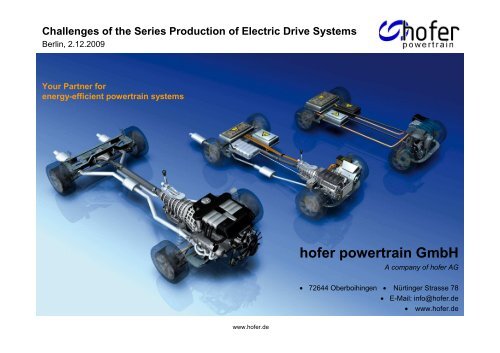
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Berlin, 2.12.2009<br />
Your Partner for<br />
energy-efficient <strong>powertrain</strong> systems<br />
www.h<strong>of</strong>er.de<br />
h<strong>of</strong>er <strong>powertrain</strong> <strong>GmbH</strong><br />
A company <strong>of</strong> h<strong>of</strong>er AG<br />
• 72644 Oberboihingen • Nürtinger Strasse 78<br />
• E-Mail: info@h<strong>of</strong>er.de<br />
• www.h<strong>of</strong>er.de
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Content<br />
Introduction<br />
Electrical <strong>machine</strong>s<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Conclusion<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
2
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Introduction<br />
The e-mobility will play a major role in <strong>the</strong> near future<br />
Especially <strong>electrical</strong> axle drives for hybrid- and <strong>electrical</strong> vehicles are in<br />
focus nowadays<br />
Because an <strong>electrical</strong> axle drive can be considered as a high dynamic<br />
torque-source/sink, special attention is required during <strong>the</strong> operation mode<br />
as well as in <strong>the</strong> failure mode<br />
The mass production costs for an <strong>electrical</strong> axle drive and <strong>the</strong> availability <strong>of</strong><br />
<strong>the</strong> related material will be very important<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
3
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Introduction<br />
Electric drive system for a typical axle drive<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
4
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Introduction<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Typical performance characteristic<br />
This kind <strong>of</strong> characteristic can be achieved by using different <strong>electrical</strong><br />
<strong>machine</strong>s.<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
5
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
General requirements on <strong>electrical</strong> <strong>machine</strong>s<br />
Electrical <strong>machine</strong>s integrated into <strong>the</strong> <strong>powertrain</strong> have to fulfil <strong>the</strong> following<br />
requirements:<br />
low cost<br />
low weight / small installation space<br />
high efficiency<br />
long durability / low wear<br />
high availability <strong>of</strong> <strong>the</strong> material<br />
low influence in case <strong>of</strong> failure<br />
low noise and vibration level<br />
high grade <strong>of</strong> protection<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
6
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Three-phase <strong>machine</strong>s<br />
Electrical three-phase current <strong>machine</strong>s are particularly suitable for use in<br />
hybrid – and <strong>electrical</strong> vehicles.<br />
Asynchronous<br />
<strong>machine</strong><br />
with cage rotor<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Three-phase <strong>machine</strong>s<br />
Synchronous <strong>machine</strong><br />
with permanent<br />
magnet excitation<br />
with separate<br />
excitation<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
7
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Asynchronous <strong>machine</strong><br />
Block circuit diagram for such a drive<br />
Rotor design <strong>of</strong> an asynchronous <strong>machine</strong> with squirrel cage<br />
Electrical drive based on asynchronous <strong>machine</strong><br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Conductor bars<br />
Short circuit ring<br />
Rotor<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
8
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Permanent magnet excited synchronous <strong>machine</strong><br />
Block circuit diagram <strong>of</strong> a permanent excited synchronous <strong>machine</strong><br />
Rotor design <strong>of</strong> permanent excited synchronous <strong>machine</strong>s<br />
Electrical drive based on permanent excited synchronous <strong>machine</strong><br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Permanent magnets<br />
Bandage<br />
Rotor<br />
PSM<br />
Permanent magnets<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
9
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Current excited (separate excited) synchronous <strong>machine</strong><br />
Rotor design <strong>of</strong> a separately excited synchronous <strong>machine</strong><br />
Electrical drive based on a separately excited synchronous <strong>machine</strong><br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
SM<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
10
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Utilization <strong>of</strong> <strong>electrical</strong> <strong>machine</strong>s<br />
Important equations<br />
1. Equation:<br />
Fast running <strong>machine</strong>s <strong>the</strong>refore have a smaller size than <strong>machine</strong>s with lower<br />
speed at <strong>the</strong> same performance<br />
2. Equation:<br />
⋅ n<br />
The size <strong>of</strong> an electric <strong>machine</strong> will be determined by <strong>the</strong> required torque, if<br />
will be constant.<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
f<br />
f<br />
f<br />
s<br />
s<br />
s<br />
S<br />
π<br />
⋅ ⋅ D<br />
4<br />
⋅V<br />
= T<br />
Pmech<br />
=<br />
V ⋅ 2π<br />
2<br />
⋅l<br />
= T<br />
f s<br />
= Bˆ<br />
⋅ Aˆ<br />
Pmech: Mechanical power<br />
fs: Specific tangential force<br />
ns: B: ˆ<br />
Rotor speed<br />
Flux density peak value<br />
Â: Electrical loading peak value<br />
D: Diameter <strong>of</strong> <strong>the</strong> rotor<br />
l: Length <strong>of</strong> <strong>the</strong> rotor<br />
V: Rotor size<br />
T: Torque<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
11<br />
f s
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
Development process for an <strong>electrical</strong> <strong>machine</strong><br />
expert knowledge<br />
In addition to <strong>the</strong> above mentioned performance simulation also a dynamic simulation concerning<br />
<strong>the</strong> dynamic behavior <strong>of</strong> <strong>the</strong> electric drive – especially in case <strong>of</strong> failure – is required. This<br />
simulation is very important regarding <strong>the</strong> influence on <strong>the</strong> vehicle dynamic.<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
FEM<br />
mechanic<br />
calculation<br />
requirements<br />
E-drive<br />
EM<br />
analytical<br />
calculation<br />
FEM<br />
electro magnetic<br />
calculation<br />
no<br />
system<br />
simulation<br />
prototype<br />
test bench<br />
vehicle<br />
yes requirements<br />
fulfilled<br />
boundary conditions<br />
• power electronic<br />
• battery<br />
• installation space<br />
<strong>the</strong>rmal simulation<br />
EM-<strong>control</strong> strategy<br />
power electronics<br />
<strong>control</strong><br />
structure dynamic A.<br />
acoustics<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
12
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
<strong>Optimized</strong> <strong>control</strong> <strong>of</strong> <strong>the</strong> <strong>electrical</strong> <strong>machine</strong><br />
In principle all mentioned <strong>electrical</strong> <strong>machine</strong>s can be used. But especially for axle<br />
drives a high speed asynchronous <strong>machine</strong> in connection with a transmission<br />
with a high gear ratio is well suited for <strong>the</strong> following reasons:<br />
Very high robustness<br />
No safety issues in case <strong>of</strong> failure<br />
Needs aluminum inside <strong>the</strong> rotor instead <strong>of</strong> rear earth magnets, <strong>the</strong>refore no problem<br />
with availability <strong>of</strong> magnet materials<br />
Low cost solution compared to o<strong>the</strong>r solutions. Therefore well suited for mass<br />
production<br />
High overload capability<br />
Well suited for high speed applications<br />
No problems with acoustic noise<br />
Very low torque ripple compared to o<strong>the</strong>r solutions<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
13
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
<strong>Optimized</strong> <strong>control</strong> <strong>of</strong> an ASM<br />
Temp<br />
_ref<br />
Motor/Generator/<br />
passive mode<br />
is_max<br />
Temp.<br />
compensation<br />
n_ref<br />
n_obs<br />
Map for optimal<br />
efficiency<br />
Flux on line<br />
optimization<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Rs<br />
Rr<br />
feed forward<br />
rd_ref isd<br />
+<br />
isd_ref<br />
-<br />
isd_real<br />
_ref<br />
1 isq_ref<br />
isq<br />
+<br />
n rd<br />
-<br />
isq_real<br />
feed forward<br />
2<br />
is = isd + isq 2<br />
is Us Usq<br />
Usd<br />
2<br />
Uu<br />
Uv<br />
3<br />
isq<br />
isd<br />
Speed<br />
Observer<br />
Uw<br />
2<br />
3<br />
n_obs<br />
iu<br />
iv<br />
Control for optimal efficiency in<br />
complete speed range<br />
Air gap flux must be adjusted<br />
permanently to <strong>the</strong> driving situation<br />
(dynamic- efficiency mode, selection<br />
via CAN)<br />
Best voltage usage in field weakening<br />
(Optimal Pulse-Patterns )<br />
ϕrd = f ( U dc,<br />
Treq<br />
, ω)<br />
ϕ rd – Rotor flux<br />
U dc – dc-link/battery voltage<br />
T req – Reference torque<br />
ω<br />
– Rotor speed<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
14
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
<strong>Optimized</strong> <strong>control</strong> <strong>of</strong> a PSM/IPM Control <strong>of</strong> IPM Machine with consideration<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
<strong>of</strong> non-linear E-Machine Parameters<br />
Parameter Definition strategy Ld, Lq, Psi_p<br />
Best voltage usage in field weakening<br />
(Optimal Pulse-Patterns )<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
15
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Electrical <strong>machine</strong>s<br />
<strong>Optimized</strong> <strong>control</strong> <strong>of</strong> <strong>the</strong> <strong>electrical</strong> <strong>machine</strong><br />
Typical simulation <strong>of</strong> an <strong>electrical</strong> drive including a battery model<br />
Typical system simulation including <strong>electrical</strong> <strong>machine</strong>s, power electronics and battery<br />
based on a driving cycle (NEDC)<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Tq_req_asm<br />
N<br />
2.5<br />
Battery model<br />
U_batt<br />
+<br />
-<br />
U_batt = 270 V<br />
R_batt = 0.4 X<br />
R_batt<br />
Gear<br />
Tq_req_psm<br />
N<br />
U_dc<br />
N_isg<br />
I_dc<br />
PSM<br />
ASM<br />
Tq<br />
I_ph<br />
P_dc<br />
I_dc_psm<br />
Tq<br />
I_ph<br />
P_dc<br />
U_dc I_dc_isg<br />
+ +<br />
I_dc_psm<br />
I_dc_isg<br />
Tq<br />
I_ph<br />
P_dc<br />
I_dc<br />
Tq<br />
I_ph<br />
P_dc<br />
I_dc<br />
Tq [Nm]<br />
Idc [A]<br />
200<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
160<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
Torque PSM<br />
-100<br />
900 950 1000 1050 1100 1150<br />
t[s]<br />
-40<br />
900 950 1000 1050 1100 1150<br />
t[s]<br />
I_dc PSM<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
16
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Electrical axle drives can be applied in hybrid vehicles as well as in pure <strong>electrical</strong><br />
vehicles. In a hybrid vehicle normally only one axis is electrified. In a pure <strong>electrical</strong><br />
vehicle all axis, even all wheels can be separately driven by an electric drive.<br />
B<br />
B<br />
G E E G<br />
Chassis<br />
G E E G<br />
Electrical vehicle with all wheel drives<br />
With this configuration it is possible to influence <strong>the</strong> longitudinal dynamic as well as <strong>the</strong><br />
transversal dynamic <strong>of</strong> <strong>the</strong> vehicle. With this concept it is possible to have a specific<br />
acceleration – or brake torque on each wheel, so called “torque vectoring”. Fur<strong>the</strong>rmore<br />
it is possible to compensate over steer or under steer with a brake intervention but also<br />
with a power boost in a range <strong>of</strong> some mille seconds.<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
B<br />
B<br />
Front<br />
wheels<br />
Rear<br />
wheels<br />
E: Electrical <strong>machine</strong><br />
B: Brake<br />
G: Gear - Box<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
17
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
System behaviour in normal mode <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive<br />
As earlier mentioned only an axle drive will be considered.<br />
Mechanical model <strong>of</strong> an axle drive<br />
This model can be used for different investigations:<br />
Acoustic noise<br />
Bonanza – and jerk effect<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Chassis<br />
Axle bearing<br />
Stator EM<br />
Rotor EM<br />
-<br />
EM<br />
T<br />
Gearbox<br />
Drive<br />
shaft<br />
c<br />
Vehicle<br />
-<br />
F<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
18
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Acoustic noise<br />
The main reason <strong>of</strong> acoustic noise <strong>of</strong> an <strong>electrical</strong> axle drive is normally <strong>the</strong> torque<br />
ripple <strong>of</strong> an <strong>electrical</strong> <strong>machine</strong>. The torque ripple depends on <strong>the</strong> kind <strong>of</strong> <strong>the</strong> <strong>electrical</strong><br />
<strong>machine</strong> but also on <strong>the</strong> design <strong>of</strong> <strong>the</strong> <strong>machine</strong>.<br />
The torque ripple will be transferred via different ways:<br />
From <strong>the</strong> rotor shaft to <strong>the</strong> gearbox<br />
From <strong>the</strong> stator housing via axle bearings to <strong>the</strong> chassis<br />
In both cases <strong>the</strong> torque ripple can generate acoustic noise.<br />
Fur<strong>the</strong>rmore <strong>the</strong> stator housing <strong>of</strong> <strong>the</strong> <strong>electrical</strong> <strong>machine</strong> can also generate structure<br />
borne noise caused by radial magnetic forces.<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
19
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Dynamic drive <strong>control</strong><br />
The main task <strong>of</strong> <strong>the</strong> dynamic drive <strong>control</strong> is <strong>the</strong> active damping <strong>of</strong> oscillations within<br />
<strong>the</strong> drive train. The following boundary conditions have to be taken into account:<br />
On <strong>the</strong> one hand, an oscillation excitation by <strong>the</strong> driving<br />
torque <strong>of</strong> <strong>the</strong> electric drive shall be compensated. This is<br />
<strong>the</strong> case if a fast torque demand is required e.g. "Tip in".<br />
On <strong>the</strong> o<strong>the</strong>r hand also outer disturbances, e.g. caused by<br />
<strong>the</strong> wheels have to be considered.<br />
The reduction <strong>of</strong> <strong>the</strong> oscillations, shall not lead to a noticeable<br />
reduction <strong>of</strong> <strong>the</strong> torque dynamics which <strong>the</strong> driver perceives asbeing negative.<br />
In case <strong>of</strong> failure <strong>the</strong> vehicle dynamic should not be influenced noticeable.<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
Chassis<br />
Front<br />
wheels<br />
Rear<br />
wheels<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
20<br />
B<br />
B<br />
G E E G<br />
G E E G<br />
B<br />
B
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Dynamic drive <strong>control</strong><br />
Classical approach<br />
T ref<br />
filter<br />
Block circuit diagram <strong>of</strong> <strong>the</strong> <strong>control</strong>led system with a classic <strong>control</strong> concept<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
-<br />
feed-forward<br />
<strong>control</strong><br />
<strong>control</strong>ler<br />
T* em<br />
<strong>control</strong> plant<br />
inverter<br />
+ ASM<br />
filter<br />
T*<br />
disturbance<br />
drive train<br />
TS Ωwheel Ω Rotor<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
21
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Dynamic drive <strong>control</strong><br />
State variable <strong>control</strong><br />
In <strong>the</strong> <strong>control</strong> engineering <strong>the</strong> state variable <strong>control</strong> represents an alternative to <strong>the</strong><br />
classical methods. Starting point for this is a description <strong>of</strong> <strong>the</strong> system to be <strong>control</strong>led<br />
in <strong>the</strong> state space in which a linear time-invariant behavior is presupposed.<br />
T ref<br />
Model <strong>of</strong> an axle drive with state variable <strong>control</strong><br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
VV<br />
preliminary<br />
filter<br />
T em<br />
-<br />
•<br />
x (t)<br />
1<br />
S<br />
x(0) + z (disturbance variable)<br />
x (t)<br />
BB CC<br />
RR<br />
A<br />
measurement<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
22<br />
Ω R
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Safety relevant aspects<br />
Possible failures within an electric drive<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
23
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Safety relevant aspects by using a PSM/IPM for an axle drive<br />
Three-phase short circuit Two-phase short circuit<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
•n= const<br />
Braking torque Oscillation torque<br />
Idle speed /<br />
no load operation<br />
Dragging torque<br />
B<br />
B<br />
G E E G<br />
Chassis<br />
G E E G<br />
Front<br />
wheels<br />
Rear<br />
wheels<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
24<br />
B<br />
B
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Challenges <strong>of</strong> <strong>the</strong> <strong>electrical</strong> drive system<br />
Safety relevant aspects<br />
By using an <strong>electrical</strong> axle drive based on an asynchronous <strong>machine</strong> or a separately<br />
excited synchronous <strong>machine</strong> <strong>the</strong>re are no special measures in case <strong>of</strong> failure<br />
required<br />
By using an <strong>electrical</strong> axle drive based on a permanent magnet excited synchronous<br />
<strong>machine</strong> (PSM/IPM) <strong>the</strong> following measures are required in case <strong>of</strong> a three-<br />
phase/two-phase short circuit in order to avoid safety problems with <strong>the</strong> vehicle:<br />
Disconnecting <strong>the</strong> mechanical drive train by a fast switching clutch<br />
Disconnecting <strong>the</strong> terminals <strong>of</strong> <strong>the</strong> <strong>machine</strong> or disconnecting <strong>the</strong> star point <strong>of</strong> <strong>the</strong> threephase<br />
winding <strong>of</strong> <strong>the</strong> <strong>machine</strong><br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
25
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Conclusion<br />
Some important items have been considered in order to avoid serious problems with<br />
<strong>the</strong> mass production <strong>of</strong> hybrid– and <strong>electrical</strong> vehicles<br />
It is very important to consider <strong>the</strong> total vehicle system behavior in <strong>the</strong> operation<br />
mode as well as in <strong>the</strong> failure mode <strong>of</strong> an <strong>electrical</strong> axle drive<br />
It was shown, what kind <strong>of</strong> an <strong>electrical</strong> axle drive has a big potential for <strong>the</strong> future<br />
to fulfill <strong>the</strong> economic and technical requirements <strong>of</strong> hybrid- and <strong>electrical</strong> vehicles<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
26
Challenges <strong>of</strong> <strong>the</strong> Series Production <strong>of</strong> Electric Drive Systems<br />
Contact<br />
Your contact: Dr. Heinz Schaefer<br />
e-mail info@h<strong>of</strong>er.de<br />
9th International CTI Symposium<br />
„Innovative Automotive Transmissions“<br />
tel. +49 931 359335-0<br />
fax +49 931 359335-129<br />
Visit us at: www.h<strong>of</strong>er.de<br />
www.h<strong>of</strong>er.de 2.12.09 / Schäfer<br />
27