Konecranes World №7
Konecranes World №7
Konecranes World №7

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
@ KONECRANES KNOW-HOW<br />
DEDICATED FEATURES<br />
IN KCI DRIVES<br />
Today’s advanced crane technology<br />
tightly integrates mechanical,<br />
electrical and controls, which<br />
makes it nearly impossible to<br />
reach a safe, reliable and optimised<br />
solution with distributed (or diverse)<br />
suppliers. The crane manufacturer who<br />
fully understands the customer’s product<br />
requirements has the best grasp of all the<br />
interactions and relations between structure<br />
and components. Integrated systems<br />
developed and applied by crane<br />
manufacturers provide additional advantages<br />
in functionality, reliability and maintainability.<br />
16 KONECRANES’ WORLD No 7<br />
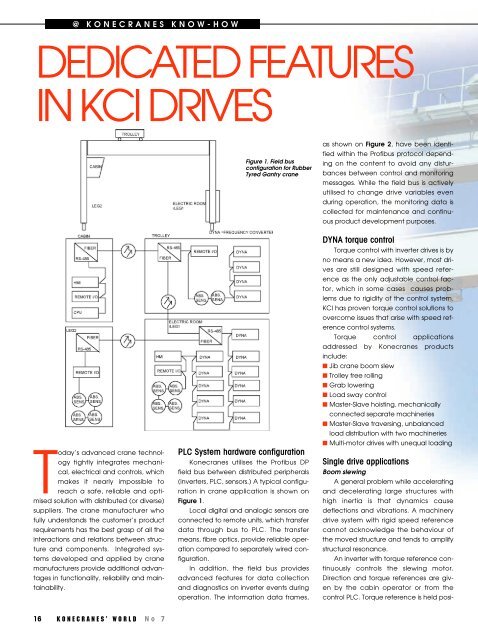
Figure 1. Field bus<br />
configuration for Rubber<br />
Tyred Gantry crane<br />
PLC System hardware configuration<br />
<strong>Konecranes</strong> utilises the Profibus DP<br />
field bus between distributed peripherals<br />
(inverters, PLC, sensors.) A typical configuration<br />
in crane application is shown on<br />
Figure 1.<br />
Local digital and analogic sensors are<br />
connected to remote units, which transfer<br />
data through bus to PLC. The transfer<br />
means, fibre optics, provide reliable operation<br />
compared to separately wired configuration.<br />
In addition, the field bus provides<br />
advanced features for data collection<br />
and diagnostics on inverter events during<br />
operation. The information data frames,<br />
as shown on Figure 2, have been identified<br />
within the Profibus protocol depending<br />
on the content to avoid any disturbances<br />
between control and monitoring<br />
messages. While the field bus is actively<br />
utilised to change drive variables even<br />
during operation, the monitoring data is<br />
collected for maintenance and continuous<br />
product development purposes.<br />
DYNA torque control<br />
Torque control with inverter drives is by<br />
no means a new idea. However, most drives<br />
are still designed with speed reference<br />
as the only adjustable control factor,<br />
which in some cases causes problems<br />
due to rigidity of the control system.<br />
KCI has proven torque control solutions to<br />
overcome issues that arise with speed reference<br />
control systems.<br />
Torque control applications<br />
addressed by <strong>Konecranes</strong> products<br />
include:<br />
■ Jib crane boom slew<br />
■ Trolley free rolling<br />
■ Grab lowering<br />
■ Load sway control<br />
■ Master-Slave hoisting, mechanically<br />
connected separate machineries<br />
■ Master-Slave traversing, unbalanced<br />
load distribution with two machineries<br />
■ Multi-motor drives with unequal loading<br />
Single drive applications<br />
Boom slewing<br />
A general problem while accelerating<br />
and decelerating large structures with<br />
high inertia is that dynamics cause<br />
deflections and vibrations. A machinery<br />
drive system with rigid speed reference<br />
cannot acknowledge the behaviour of<br />
the moved structure and tends to amplify<br />
structural resonance.<br />
An inverter with torque reference continuously<br />
controls the slewing motor.<br />
Direction and torque references are given<br />
by the cabin operator or from the<br />
control PLC. Torque reference is held posi-