

Techniques for Web Telerobotics - Australia's Telerobot on the Web ...
Techniques for Web Telerobotics - Australia's Telerobot on the Web ...
Techniques for Web Telerobotics - Australia's Telerobot on the Web ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6.5 The Framework in Practice 113<br />
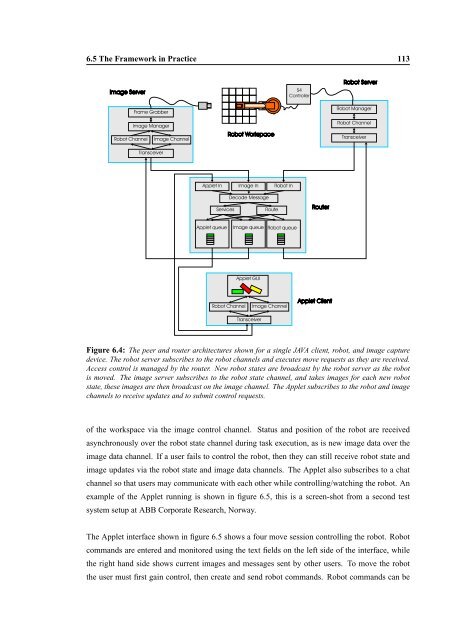
Figure 6.4: The peer and router architectures shown <str<strong>on</strong>g>for</str<strong>on</strong>g> a single JAVA client, robot, and image capture<br />
device. The robot server subscribes to <strong>the</strong> robot channels and executes move requests as <strong>the</strong>y are received.<br />
Access c<strong>on</strong>trol is managed by <strong>the</strong> router. New robot states are broadcast by <strong>the</strong> robot server as <strong>the</strong> robot<br />
is moved. The image server subscribes to <strong>the</strong> robot state channel, and takes images <str<strong>on</strong>g>for</str<strong>on</strong>g> each new robot<br />
state, <strong>the</strong>se images are <strong>the</strong>n broadcast <strong>on</strong> <strong>the</strong> image channel. The Applet subscribes to <strong>the</strong> robot and image<br />
channels to receive updates and to submit c<strong>on</strong>trol requests.<br />
of <strong>the</strong> workspace via <strong>the</strong> image c<strong>on</strong>trol channel. Status and positi<strong>on</strong> of <strong>the</strong> robot are received<br />
asynchr<strong>on</strong>ously over <strong>the</strong> robot state channel during task executi<strong>on</strong>, as is new image data over <strong>the</strong><br />
image data channel. If a user fails to c<strong>on</strong>trol <strong>the</strong> robot, <strong>the</strong>n <strong>the</strong>y can still receive robot state and<br />
image updates via <strong>the</strong> robot state and image data channels. The Applet also subscribes to a chat<br />
channel so that users may communicate with each o<strong>the</strong>r while c<strong>on</strong>trolling/watching <strong>the</strong> robot. An<br />
example of <strong>the</strong> Applet running is shown in figure 6.5, this is a screen-shot from a sec<strong>on</strong>d test<br />
system setup at ABB Corporate Research, Norway.<br />
The Applet interface shown in figure 6.5 shows a four move sessi<strong>on</strong> c<strong>on</strong>trolling <strong>the</strong> robot. Robot<br />
commands are entered and m<strong>on</strong>itored using <strong>the</strong> text fields <strong>on</strong> <strong>the</strong> left side of <strong>the</strong> interface, while<br />
<strong>the</strong> right hand side shows current images and messages sent by o<strong>the</strong>r users. To move <strong>the</strong> robot<br />
<strong>the</strong> user must first gain c<strong>on</strong>trol, <strong>the</strong>n create and send robot commands. Robot commands can be