

Techniques for Web Telerobotics - Australia's Telerobot on the Web ...
Techniques for Web Telerobotics - Australia's Telerobot on the Web ...
Techniques for Web Telerobotics - Australia's Telerobot on the Web ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.2 <str<strong>on</strong>g>Web</str<strong>on</strong>g> <str<strong>on</strong>g>Telerobot</str<strong>on</strong>g>s 19<br />
a wireframe modelling envir<strong>on</strong>ment which runs as a Java Applet. These structures are <strong>the</strong>n c<strong>on</strong>-<br />
structed by an industrial robot arm which cements 1cm rectangular elements within a 2 meter<br />
building area. The interface is shown in figure 2.9.<br />
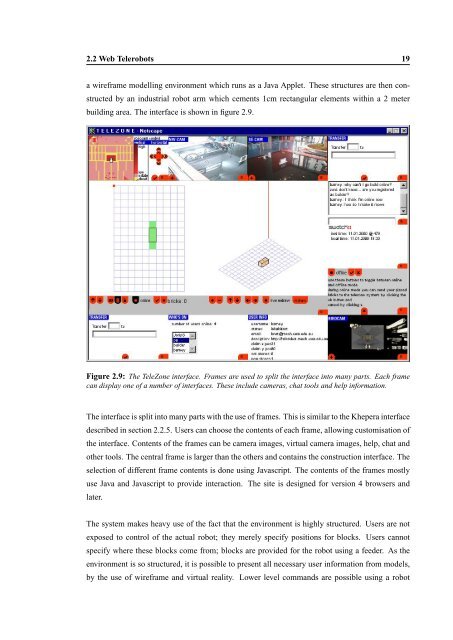
Figure 2.9: The TeleZ<strong>on</strong>e interface. Frames are used to split <strong>the</strong> interface into many parts. Each frame<br />
can display <strong>on</strong>e of a number of interfaces. These include cameras, chat tools and help in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong>.<br />
The interface is split into many parts with <strong>the</strong> use of frames. This is similar to <strong>the</strong> Khepera interface<br />
described in secti<strong>on</strong> 2.2.5. Users can choose <strong>the</strong> c<strong>on</strong>tents of each frame, allowing customisati<strong>on</strong> of<br />
<strong>the</strong> interface. C<strong>on</strong>tents of <strong>the</strong> frames can be camera images, virtual camera images, help, chat and<br />
o<strong>the</strong>r tools. The central frame is larger than <strong>the</strong> o<strong>the</strong>rs and c<strong>on</strong>tains <strong>the</strong> c<strong>on</strong>structi<strong>on</strong> interface. The<br />
selecti<strong>on</strong> of different frame c<strong>on</strong>tents is d<strong>on</strong>e using Javascript. The c<strong>on</strong>tents of <strong>the</strong> frames mostly<br />
use Java and Javascript to provide interacti<strong>on</strong>. The site is designed <str<strong>on</strong>g>for</str<strong>on</strong>g> versi<strong>on</strong> 4 browsers and<br />
later.<br />
The system makes heavy use of <strong>the</strong> fact that <strong>the</strong> envir<strong>on</strong>ment is highly structured. Users are not<br />
exposed to c<strong>on</strong>trol of <strong>the</strong> actual robot; <strong>the</strong>y merely specify positi<strong>on</strong>s <str<strong>on</strong>g>for</str<strong>on</strong>g> blocks. Users cannot<br />
specify where <strong>the</strong>se blocks come from; blocks are provided <str<strong>on</strong>g>for</str<strong>on</strong>g> <strong>the</strong> robot using a feeder. As <strong>the</strong><br />
envir<strong>on</strong>ment is so structured, it is possible to present all necessary user in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong> from models,<br />
by <strong>the</strong> use of wireframe and virtual reality. Lower level commands are possible using a robot