

Homework 8 EE235, Spring 2012 Solutions 1. Find the (unilateral ...
Homework 8 EE235, Spring 2012 Solutions 1. Find the (unilateral ...
Homework 8 EE235, Spring 2012 Solutions 1. Find the (unilateral ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Homework</strong> 8<br />
<strong>EE235</strong>, <strong>Spring</strong> <strong>2012</strong><br />
<strong>Solutions</strong><br />
<strong>1.</strong> <strong>Find</strong> <strong>the</strong> (<strong>unilateral</strong>) Laplace transform of <strong>the</strong> following signals:<br />
(a) x(t) = e −t u(t)<br />
(b) x(t) = e −t (t − 2)u(t − 2)<br />
(c) x(t) = t 2 e −2t u(t)<br />
X(s) = 1<br />
s + 1 .<br />
X(s) = e−2(s+1)<br />
.<br />
(s + 1) 2<br />
X(s) =<br />
2<br />
.<br />
(s + 2) 3<br />
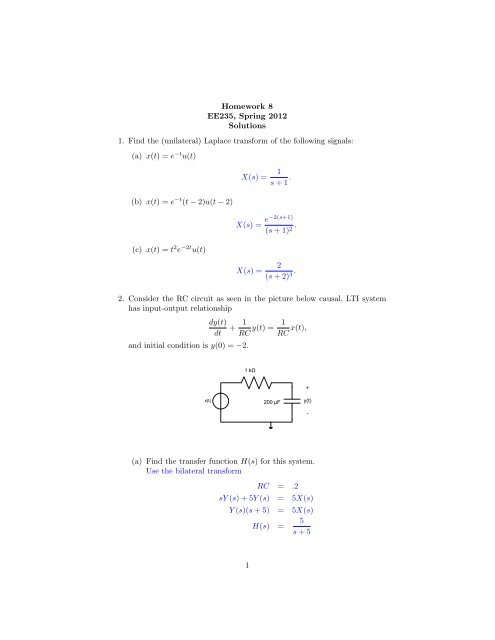
2. Consider <strong>the</strong> RC circuit as seen in <strong>the</strong> picture below causal, LTI system<br />
has input-output relationship<br />
dy(t)<br />
dt<br />
and initial condition is y(0) = −2.<br />
x(t)<br />
1 1<br />
+ y(t) =<br />
RC RC x(t),<br />
1 kΩ<br />
200 µF<br />
(a) <strong>Find</strong> <strong>the</strong> transfer function H(s) for this system.<br />
Use <strong>the</strong> bilateral transform<br />
RC = .2<br />
+<br />
y(t)<br />
sY (s) + 5Y (s) = 5X(s)<br />
Y (s)(s + 5) = 5X(s)<br />
H(s) =<br />
5<br />
s + 5<br />
1<br />
-
(b) What are <strong>the</strong> poles and zeros of this H(s)? Plot <strong>the</strong> corresponding<br />
pole-zero plot.<br />
There are no zeros for this function and a pole at s = −5.<br />
Imaginary Axis<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
−6<br />
Pole−Zero Map<br />
−6 −4 −2 0<br />
Real Axis<br />
2 4 6<br />
(c) With <strong>the</strong> given initial conditions, find <strong>the</strong> system response y(t) to an<br />
input x(t) = 3<br />
5 e−2t u(t).<br />
Use <strong>the</strong> <strong>unilateral</strong> transform since we are given <strong>the</strong> initial condition<br />
RC = .2<br />
sY (s) − y(0 − ) + 5Y (s) = 5X(s)<br />
Y (s)(s + 5) = 5X(s) + y(0 − )<br />
Y (s) =<br />
1<br />
s + 5 (5X(s) + y(0− ))<br />
X(s) = 3 1<br />
5 s + 2<br />
Y (s) =<br />
3<br />
2<br />
−<br />
(s + 5)(s + 2) s + 5<br />
Y (s) =<br />
1 1 2<br />
− −<br />
s + 2 s + 5 s + 5<br />
Y (s) =<br />
1 3<br />
−<br />
s + 2 s + 5<br />
y(t) = (e −2t − 3e −5t )u(t)<br />
(d) Use <strong>the</strong> initial value <strong>the</strong>orem to find <strong>the</strong> initial value of y(t), i.e.,<br />
y(0 + ). Confirm your answer with your result in part (c).<br />
2
The initial value <strong>the</strong>orem states<br />
lims→∞sY (s) = y(0 + )<br />
Y (s) =<br />
1 3<br />
−<br />
s + 2 s + 5<br />
lims→∞sY (s) = lims→∞s( 1<br />
= lims→∞<br />
= 1 − 3<br />
= −2<br />
1 + 2<br />
s<br />
− 3<br />
s + 5 )<br />
s + 2<br />
1<br />
− 3<br />
1 + 5<br />
s<br />
This is what we expect since <strong>the</strong> initial condition is -2 and <strong>the</strong> voltage<br />
across <strong>the</strong> capacitor cannot change instantaneously to match <strong>the</strong><br />
forcing function.<br />
(e) Use <strong>the</strong> final value <strong>the</strong>orem to find <strong>the</strong> final value of y(t), i.e., <strong>the</strong><br />
value of y(t) when t → +∞. Confirm your answer with your result<br />
in part (c).<br />
The initial value <strong>the</strong>orem states<br />
lims→0sY (s) = limt→∞y(t)<br />
Y (s) =<br />
1 3<br />
−<br />
s + 2 s + 5<br />
lims→0sY (s) = lims→0s( 1 3<br />
−<br />
s + 2 s + 5 )<br />
= 0 1<br />
2<br />
= 0<br />
− 03<br />
5<br />
This is what we expect because at t → ∞ we expect <strong>the</strong> voltage<br />
across <strong>the</strong> capacitor to match <strong>the</strong> voltage of <strong>the</strong> forcing function. At<br />
time t → ∞, x(t) = 0.<br />
3. For an LTI system with transfer function H(s) = 3s(s−1)<br />
(s−2)(s+3) , give its natural<br />
modes and state if <strong>the</strong> system is stable/unstable/marginally stable.<br />
Justify your answer.<br />
The natural modes are e2t and e−3t . The poles to <strong>the</strong> system are at<br />
s = 2, −3. The system is unstable due to <strong>the</strong> pole at s = 2.<br />
4. Consider a causal LTI system is described by<br />
d2y(t) − y(t) = 4x(t)<br />
dt2 with all initial conditions zero. An input x(t) = cos(5t)u(t) is applied.<br />
3
(a) Use (<strong>unilateral</strong>) Laplace transforms to find <strong>the</strong> output y(t).<br />
d2y(t) − y(t)<br />
dt2 =<br />
↓<br />
4x(t)<br />
s 2 Y (s) − d<br />
dt x(t)|t=0 − sx(t)|t=0 − Y (s) = 4X(s)<br />
Y (s)(s 2 − 1) = 4X(s)<br />
Y (s) =<br />
4<br />
s2 s<br />
− 1 s2 + 25<br />
Y (s) = 2 s<br />
13 s2 2 s<br />
−<br />
− 1 13 s2 + 25<br />
Y (s) = 2 1 1 2 s<br />
( + ) −<br />
26 s − 1 s + 1 13 s2 ↓<br />
+ 25<br />
y(t) = 2<br />
26 (et + e −t )u(t) − 2<br />
13 cos(5t)u(t)<br />
(b) State if <strong>the</strong> system is stable/unstable/marginally stable. Justify your<br />
answer.<br />
The system is unstable because <strong>the</strong>re is a pole at s = <strong>1.</strong><br />
5. Consider <strong>the</strong> system with <strong>the</strong> impulse response<br />
h(t) = δ(t) + e −3t u(t) + 2e −t u(t)<br />
(a) <strong>Find</strong> <strong>the</strong> transfer function of <strong>the</strong> inverse system.<br />
Want to find G(s) such that G(s) = 1<br />
H(s) .<br />
H(s) = 1 + 1 2<br />
+<br />
s + 3 s + 1<br />
H(s) =<br />
(s + 3)(s + 1)<br />
(s + 3)(s + 1) +<br />
(s + 1)<br />
(s + 3)(s + 1) +<br />
2(s + 3)<br />
(s + 3)(s + 1)<br />
H(s) = s2 + 4s + 3 + 2s + 6 + s + 1<br />
(s + 3)(s + 1)<br />
H(s) = s2 + 7s + 10<br />
(s + 3)(s + 1)<br />
G(s) =<br />
(s + 3)(s + 1)<br />
s2 + 7s + 10<br />
G(s) =<br />
(s + 3)(s + 1)<br />
(s + 2)(s + 5)<br />
4
(b) Does a stable and causal inverse system exist?<br />
Yes a causal, stable inverse exists. The inverse system has poles at<br />
s = −2, −5.<br />
6. Consider a system with a causal impulse response h(t). Its system transfer<br />
function H(s) has <strong>the</strong> following pole-zero plot,<br />
(a) Given that this impulse response h(t) is a causal signal, what is <strong>the</strong><br />
region of convergence?<br />
causal ⇒ right-sided ⇒ ROC: Re{s} > 1<br />
(b) <strong>Find</strong> h(t) (you can keep any constant multiplier in your solution).<br />
If we keep constant multiplier A, we have<br />
where<br />
H(s) =<br />
=<br />
A<br />
(s + 3)(s + 2 − j)(s + 2 + j)(s − 1)<br />
A1<br />
s + 3 +<br />
A2<br />
s + 2 − j +<br />
A3 A4<br />
+<br />
s + 2 + j s − 1 ,<br />
A1 = − 1<br />
8 A, A2<br />
1 + 2j<br />
=<br />
20 A, A3<br />
1 − 2j<br />
=<br />
20 A, A4 = 1<br />
40 A.<br />
So <strong>the</strong> corresponding causal impulse response is<br />
h(t) = A1e −3t u(t) + A2e −(2−j)t u(t) + A3e −(2+j)t u(t) + A4e t u(t)<br />
= − 1<br />
8 Ae−3t u(t) + 1<br />
10 Ae−2t (cos t − 2 sin t)u(t) + 1<br />
40 Aet u(t)<br />
(c) Is <strong>the</strong> system with this impulse response h(t) a BIBO stable system?<br />
No, this system has a pole s = 1 on <strong>the</strong> right half-plane, so it is not<br />
BIBO stable.<br />
5
(d) We form ano<strong>the</strong>r causal LTI system, whose system transfer function<br />
is H1(s) = (s + 2 + j)H(s). Let h1(t) be <strong>the</strong> impulse response of this<br />
new system. Is h1(t) a real signal? Justify your answer.<br />
Since<br />
H1(s) = (s + 2 + j)H(s) =<br />
A<br />
(s + 3)(s + 2 − j)(s − 1) ,<br />
which has three poles, h1(t) cannot be real, because for real signals,<br />
if <strong>the</strong>y have complex poles or zeros, <strong>the</strong>y must be in conjugate pairs.<br />
Here for H1(s), it has a complex pole at s = −2 + j, but it does not<br />
have a pole at s = −2 − j, so h1(t) cannot be real.<br />
6