stage 6 triennial report 1 July 2009–30 June 2012 ... - CHARMEC
stage 6 triennial report 1 July 2009–30 June 2012 ... - CHARMEC
stage 6 triennial report 1 July 2009–30 June 2012 ... - CHARMEC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Materials and maintenance – Material och underhåll (MU) – Werkstoff und Unterhalt – Matériaux et entretien<br />
MU25. ThERMODYNAMICALLY COUPLED CONTACT BETWEEN<br />
WhEEL AND RAIL<br />
Termomekaniskt kopplad kontakt mellan hjul och räl<br />
Thermomechanisch gekoppelter Kontakt zwischen Rad und Schiene<br />
Couplage thermodynamique du contact entre roue et rail<br />
Project leader Docent Anders Ekberg<br />
and supervisor Applied Mechanics/<br />
Division of Dynamics<br />
Assistant supervisors Docent Fredrik Larsson and<br />
Professor Kenneth Runesson,<br />
Applied Mechanics<br />
Doctoral candidate Mr Andreas Draganis<br />
66<br />
(from 2009-06-29;<br />
Lic Eng December 2011)<br />
Period 2009-01-01 – <strong>2012</strong>-06-30<br />
(–2014-06-30)<br />
Chalmers budget Stage 5: –<br />
(excluding university Stage 6: ksek 2400<br />
basic resources) Stage 7: ksek 2000<br />
Industrial interests Stage 5: –<br />
in-kind budget Stage 6: –<br />
Stage 7: –<br />
The project has been partially financed by The Swedish Research<br />
Council, VR (through <strong>CHARMEC</strong>’s budget)<br />
Project mu25 investigates and develops efficient methods<br />
for modelling and computation of the thermomechanically<br />
coupled problem when two deformable bodies are in<br />
high-speed sliding contact. A typical example is a braked<br />
(and locked) railway wheel that moves along the rail. A<br />
major challenge here is to formulate a computationally<br />
efficient description of the motion of the two bodies. In<br />
particular, such a description should account for the high<br />
accuracy needed in the moving contact patch. A significant<br />
motivation for the current study is the possibility to allow<br />
for refined predictions of different forms of rolling contact<br />
damage to wheels and rails.<br />
To achieve these aims, the ale (Arbitrary Lagrangian-<br />
Eulerian) kinematical description is employed. This is a<br />
generalization of the traditional Lagrangian and Eulerian<br />
descriptions. The Lagrangian description follows when the<br />
initial configuration of the bodies is taken as the reference<br />
configuration. This means that a computational finite<br />
element (fe) mesh will be fixed to material points during<br />
deformation. This description naturally allows easy tracking<br />
of boundaries and easy treatment of history-dependent<br />
material parameters, but can lead to severe degradation of<br />
the element mesh at large displacements. In the Eulerian<br />
description, the current configuration is instead chosen<br />
as the reference. This implies that a computational mesh<br />
will be fixed in space. In this description, keeping track of<br />
boundaries and history-dependent material parameters<br />
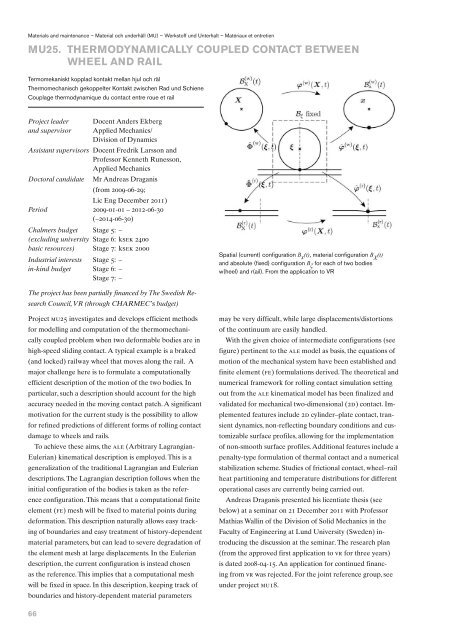
Spatial (current) configuration B x (t), material configuration B X (t)<br />
and absolute (fixed) configuration B ξ for each of two bodies<br />
w(heel) and r(ail). From the application to VR<br />
may be very difficult, while large displacements/distortions<br />
of the continuum are easily handled.<br />
With the given choice of intermediate configurations (see<br />
figure) pertinent to the ale model as basis, the equations of<br />
motion of the mechanical system have been established and<br />
finite element (fe) formulations derived. The theoretical and<br />
numerical framework for rolling contact simulation setting<br />
out from the ale kinematical model has been finalized and<br />
validated for mechanical two-dimensional (2d) contact. Implemented<br />
features include 2d cylinder–plate contact, transient<br />
dynamics, non-reflecting boundary conditions and customizable<br />
surface profiles, allowing for the implementation<br />
of non-smooth surface profiles. Additional features include a<br />
penalty-type formulation of thermal contact and a numerical<br />
stabilization scheme. Studies of frictional contact, wheel–rail<br />
heat partitioning and temperature distributions for different<br />
operational cases are currently being carried out.<br />
Andreas Draganis presented his licentiate thesis (see<br />
below) at a seminar on 21 December 2011 with Professor<br />
Mathias Wallin of the Division of Solid Mechanics in the<br />
Faculty of Engineering at Lund University (Sweden) introducing<br />
the discussion at the seminar. The research plan<br />
(from the approved first application to vr for three years)<br />
is dated 2008-04-15. An application for continued financing<br />
from vr was rejected. For the joint reference group, see<br />
under project mu18.