elementos de la teoria de tensiones y deformaciones - unne
elementos de la teoria de tensiones y deformaciones - unne
elementos de la teoria de tensiones y deformaciones - unne

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
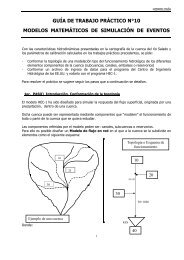
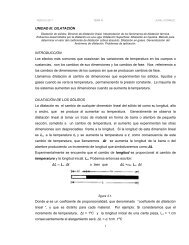
ESTABILIDAD II CAPITULO III: ELEMENTOS DE LA TEORIA DE TENSIONES Y DEFORMACIONES<br />
dx = ds.<br />
sen<br />
a<br />
dy = ds . cos a<br />
Adoptamos <strong>la</strong>s siguientes convenciones <strong>de</strong> signos:<br />
Tensiones normales: serán positivas cuando produzcan tracción.<br />
Tensiones tangenciales: serán positivas cuando produzcan un giro <strong>de</strong> momento con sentido horario<br />
respecto a un punto interior <strong>de</strong>l prisma.<br />
Angulo α : El ángulo se mi<strong>de</strong> a partir <strong>de</strong>l p<strong>la</strong>no vertical y se consi<strong>de</strong>ra positivo cuando es antihorario.<br />
El p<strong>la</strong>no <strong>de</strong>finido mediante el ángulo α es paralelo al eje z. Los tres p<strong>la</strong>nos <strong>de</strong>terminados por<br />
los ejes x, y, y el ángulo α pasan por el mismo punto; <strong>de</strong> allí que no tenemos en cuenta fuerzas <strong>de</strong> masa<br />
sobre dicho elemento.<br />
Recordamos por Cauchy:<br />
‰txy‰= ‰tyx‰ (3.7)<br />
Tomando en profundidad una distancia unitaria (dz = 1) y p<strong>la</strong>nteando proyecciones <strong>de</strong> fuerzas<br />
sobre <strong>la</strong> dirección 1, por razones <strong>de</strong> equilibrio tenemos:<br />
s<br />
s<br />
a<br />
a<br />
s a<br />
F s / direc 1<br />
ds<br />
=<br />
=<br />
=<br />
=<br />
=<br />
. 1<br />
s<br />
s<br />
s<br />
s<br />
x<br />
- s<br />
x<br />
x<br />
x<br />
s<br />
x<br />
cos<br />
2<br />
= 0<br />
dy<br />
cos a . 1<br />
a + s<br />
y<br />
+ t<br />
xy<br />
2<br />
sen a - 2t<br />
dy<br />
xy<br />
sena<br />
. 1 + s<br />
sena<br />
cos a =<br />
dx sena<br />
. 1<br />
2<br />
cos a + s y<br />
s<br />
2 x<br />
sen a +<br />
+ s s y x<br />
-<br />
2<br />
+ sy<br />
2<br />
- t xy sen2a<br />
=<br />
+ sy<br />
2<br />
sx<br />
+<br />
2<br />
s<br />
2<br />
y<br />
( 2 cos a - 1)<br />
+<br />
2<br />
2<br />
( 2sen<br />
a - 1)<br />
- txy<br />
sen2a<br />
=<br />
+ sy<br />
2<br />
sx<br />
+<br />
2<br />
s<br />
2<br />
2<br />
y<br />
(cos a - sen a)<br />
+<br />
2<br />
2<br />
(cos<br />
2<br />
a - sen a)<br />
- txy<br />
sen2a<br />
=<br />
+ s<br />
2<br />
s<br />
- s<br />
2<br />
/2005 6<br />
y<br />
+ t<br />
xy<br />
dx<br />
cos a . 1<br />
= 0<br />
x y x y<br />
+ cos 2a<br />
- t sen2a<br />
(3.8)<br />
xy