MANUAL DE MICROCONTROLADORES PIC
MANUAL DE MICROCONTROLADORES PIC
MANUAL DE MICROCONTROLADORES PIC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Trabajando a 4 Mhz y asumiendo que k se remplaza por el valor 15 d en el ejemplo<br />
tendríamos un tiempo igual a:<br />
Número de ciclos = (3*15) +1 = 46 ciclos de máquina,<br />
T ciclo máq. = 4 / 4 Mhz = 1 µ segundo, el tiempo total del ejemplo entonces será 46<br />
µsegundos.<br />
4.1 Operaciones Entrada / Salida Objetivos:<br />
• Verificar el modo en el que se debe programar el sentido de los puertos<br />
• Realizar la entradas por puerto mediante la lectura de interruptores "dip-switch"<br />
• Escribir sobre un puerto de salida visualizando sobre LEDs<br />
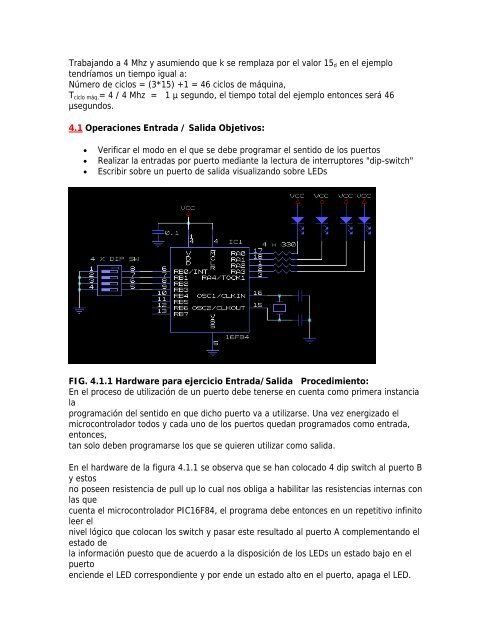
FIG. 4.1.1 Hardware para ejercicio Entrada/Salida Procedimiento:<br />
En el proceso de utilización de un puerto debe tenerse en cuenta como primera instancia<br />
la<br />
programación del sentido en que dicho puerto va a utilizarse. Una vez energizado el<br />
microcontrolador todos y cada uno de los puertos quedan programados como entrada,<br />
entonces,<br />
tan solo deben programarse los que se quieren utilizar como salida.<br />
En el hardware de la figura 4.1.1 se observa que se han colocado 4 dip switch al puerto B<br />
y estos<br />
no poseen resistencia de pull up lo cual nos obliga a habilitar las resistencias internas con<br />
las que<br />
cuenta el microcontrolador <strong>PIC</strong>16F84, el programa debe entonces en un repetitivo infinito<br />
leer el<br />
nivel lógico que colocan los switch y pasar este resultado al puerto A complementando el<br />
estado de<br />
la información puesto que de acuerdo a la disposición de los LEDs un estado bajo en el<br />
puerto<br />
enciende el LED correspondiente y por ende un estado alto en el puerto, apaga el LED.