Curso sobre Controladores Lógicos Programables ... - Edudevices
Curso sobre Controladores Lógicos Programables ... - Edudevices
Curso sobre Controladores Lógicos Programables ... - Edudevices

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Curso</strong> <strong>sobre</strong> <strong>Controladores</strong> <strong>Lógicos</strong><br />
<strong>Programables</strong> (PLC).<br />
Por Ing. Norberto Molinari.<br />
Entrega Nº 21.<br />
Capitulo 5.<br />
Redes Digitales de Datos en Sistemas de<br />
Control de Procesos<br />
Una red de computadoras es un conjunto interconectado de procesadores, capaces de<br />
intercambiar información entre sí. El estudio completo de redes de computadoras puede<br />
abarcar varios libros, por lo que sólo se presentarán aquí algunos aspectos.<br />
Justamente, se presentarán aquellos aspectos de las redes que estén relacionados con la<br />
implementación de Sistemas Digitales de Control de Procesos.<br />
En la industria, el uso de computadoras digitales aplicadas al control automático<br />
evolucionó desde un único computador supervisando algunos controladores analógicos,<br />
a complejos sistemas que interrelacionan múltiples procesadores.<br />
Estos procesadores comprenden controladores PID mono y multilazo, estaciones de<br />
operación, PLC´s, transmisores inteligentes, cromatógrafos, sistemas de inventario de<br />
playa de tanques, etc., integrados en una o varias redes de datos de tiempo real,<br />
también denominados redes de control de procesos.<br />
Por otra parte, las plantas industriales cuentan en muchos casos con sistemas de<br />
computadoras a fin de satisfacer sus necesidades administrativas y gerenciales.<br />
Llamaremos red administrativa a este sistema. Aparece como evidente que la<br />
integración de ambas redes facilitaría la administración de todo el negocio, como la<br />
compra de materias primas, el proceso de producción, la venta de productos, el pago de<br />
sueldos, etc.<br />
Surgen entonces dos áreas para la implementación de redes en las que participan los<br />
equipos digitales de control de procesos: la integración de estos equipos entre sí, y la<br />
integración de estos equipos con la red administrativa.
La integración de equipos digitales de control de procesos en una red de datos en tiempo<br />
real presenta problemas de diversa índole. Consideremos el caso de los Sistemas de<br />
Control Distribuido (DCS). Si bien estos tienen varias redes como parte de su<br />
arquitectura, su diseño es propiedad del proveedor, sin que el usuario pueda disponer de<br />
su especificación.<br />
La integración de controladores unilazo con una PC es un problema de naturaleza<br />
distinta. En este caso, el usuario accede a todos los aspectos de la implementación de la<br />
red; y debe analizar aspectos tales como la respuesta en tiempo real del sistema, ya que<br />
ésta no es Garantizada por el diseño del sistema.<br />
Lamentablemente, no existe una norma de comunicaciones para la transmisión de datos<br />
en tiempo real que haya alcanzado un alto grado de difusión. Esto hace que en algunos<br />
casos resulte técnicamente difícil integrar equipos de distintos fabricantes. Más aún, en<br />
algunos casos puede resultar técnico / económicamente desaconsejable. Varias normas<br />
emergentes intentan llenar este vacío, como MAP, SP50, etc., sin que ninguna de ellas<br />
haya logrado, hasta ahora, una amplia difusión.<br />
Las redes de datos de tiempo real y las administrativas implican distintos conceptos.<br />
Consideremos, por ejemplo, la seguridad. En la red administrativa la seguridad está<br />
asociada al acceso a la información (¿tiene usted derecho a acceder a la nómina de<br />
sueldos de la compañía?), o su preservación, (¿cuándo hizo el último back-up?).<br />
En la red de control de procesos, la seguridad también está asociada a la disponibilidad<br />
de los datos en tiempo real, y a la inmunidad del sistema a fallas de algún componente,<br />
como la rotura de un cable. Por tal motivo, es deseable la implementación de redes de<br />
alta velocidad, <strong>sobre</strong> buses redundantes.<br />
En este capítulo presentaremos conceptos básicos de redes, que permitirán una mejor<br />
comprensión del problema de las comunicaciones digitales, en relación a las dos áreas<br />
mencionadas.<br />
Inicialmente, analizaremos la integración de equipos de control según esquema<br />
denominado maestro-esclavo. Este esquema es frecuentemente utilizado en la<br />
integración de PLC´s o instrumentos unilazo con computadoras personales.<br />
Este caso nos servirá para analizar las complejidades del problema de comunicaciones,<br />
y servirá como introducción para la presentación del modelo ISO / OSI para<br />
interconexión de sistemas. Luego reanalizaremos el esquema maestro-esclavo a la luz<br />
del modelo ISO / OSI.<br />
Finalmente se presentarán distintos protocolos, y se los analizará desde el punto de vista<br />
de las problemáticas mencionadas.
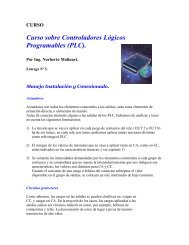
5.1 El esquema maestro-esclavo<br />
Analizaremos a continuación los aspectos asociados a la comunicación de dos o más<br />
equipos digitales de control de procesos comunicados entre sí según el esquema<br />
maestro-esclavo. Este esquema es usual en muchas plantas industriales, para la<br />
integración de controladores unilazo o PLC´s con computadoras personales.<br />
Figura 5.1 Integración de controladores unilazo y una PC.<br />
En forma simplificada, el sistema consta de un equipo digital al que llamaremos<br />
maestro, y uno o varios equipos digitales a los que llamaremos esclavos.<br />
Genéricamente, denominaremos estaciones al maestro y a los esclavos (Fig. 5.1.).<br />
La diferencia básica entre el maestro y los esclavos es que el maestro inicia las<br />
comunicaciones. Los esclavos sólo envían mensajes cuando el maestro así se los<br />
solicita. El proceso por el cual el maestro envía un mensaje, y recibe una respuesta del<br />
esclavo (si así lo solicitó) se denomina transacción.<br />
Existen dos tipos de transacción:<br />
• Consulta / respuesta (query / response): El maestro transmite un mensaje a un<br />
esclavo determinado, el que transmite una respuesta correspondiente al mensaje que<br />
recibió. Cada esclavo está identificado con una dirección (address) único en la red.<br />
Tanto el mensaje de consulta como el de respuesta contienen la dirección que<br />
identifica al esclavo al que fue dirigida la consulta. El mensaje que envía el maestro<br />
es escuchado por todos los esclavos, pero será contestado sólo por aquel esclavo<br />
cuya dirección coincida con la del mensaje. Este método es utilizado por el maestro<br />
para transmitir datos a un esclavo, así como para obtenerlos de él.
• De difusión sin respuesta (broadcast / no response): Estas transacciones tienen<br />
dos diferencias básicas con las de consulta / respuesta: tiene como destinatario a<br />
todos los esclavos, y éstos no emiten mensaje de respuesta. Este método se utiliza<br />
para transmitir un mismo dato a todos los esclavos, en una sola transacción. Un<br />
aspecto que debe considerarse es que el maestro no recibe confirmación alguna<br />
acerca de la correcta recepción del mensaje por parte de los esclavos.<br />
Obsérvese que sólo el maestro tiene capacidad de iniciar la transacción, y que los<br />
esclavos sólo hablan si este les ha preguntado algo. De esta forma, la relación maestroesclavo<br />
es definitivamente una relación de jerarquía entre ambos equipos, al menos<br />
desde el punto de vista de las comunicaciones. Por supuesto desde otros puntos de vista<br />
(como el control de procesos), cualquier esclavo podría ser más importante que el<br />
maestro.<br />
Por razones de seguridad, es frecuente que el esquema maestro-esclavo se implemente<br />
utilizando únicamente transacciones consulta / respuesta.<br />
Sucesivamente, el maestro interroga a todos los esclavos de la red, en un mecanismo<br />
conocido como encuesta (polling).<br />
Físicamente, todas las estaciones están conectadas a un único medio físico; por ejemplo,<br />
un par de cables.<br />
Brevemente descripto, este esquema parece de fácil implementación. Sin embargo, para<br />
que funcione es necesario definir varios aspectos.<br />
En primer lugar debemos definir cómo se interconectarán las distintas estaciones entre<br />
sí. El medio más usual es el uso de cables de cobre, pero también se utilizan fibras<br />
ópticas, radio, etc.<br />
Supongamos que utilizaremos cables. ¿Cómo se representarán los unos y ceros que la<br />
comunicación implica? También aquí hay una variedad de opciones: tensión, tonos de<br />
frecuencia, etc. Más aún, ¿cómo será físicamente el conector que permitirá conectar el<br />
cable? ¿Cómo se transmitirán los mensajes? ¿Qué técnicas asegurarán que el mensaje<br />
llegó sin que su contenido se altere?<br />
Como se ve, aún para este sencillo esquema es necesario detallar numerosos aspectos.<br />
Los clasificaremos en 4 grupos:<br />
• Aspectos mecánicos, eléctricos y funcionales de la comunicación.<br />
• Definición del método utilizado para compartir un único medio físico entre<br />
varias estaciones (problema conocido como acceso al medio).<br />
• Aspectos asociados al correcto envío y recepción de un mensaje.<br />
• Definición de los comandos que establecen los objetivos de la comunicación: en<br />
definitiva, ¿para qué sirve el mensaje que el maestro envió?. Por ejemplo, cambiar<br />
un valor deseado, conocer el estado de una variable de procesos, etc.
Las distintas estaciones conectadas al medio físico deberán resolver estos problemas en<br />
forma compatible. Caso contrario, no habrá posibilidad decomunicaciones entre ellas.<br />
En la práctica, será como tratar que un argentino intenta hablar con un zulú: distinto<br />
idioma, distinta cultura, distinta forma de pensar. Aún cuando compartan el mismo<br />
medio físico (el aire) y utilicen sus cuerdas vocales para hablar, no podrán intercambiar<br />
mensajes en forma directa.<br />
El conjunto de reglas y convenciones que se utilizan para resolver el problema de<br />
comunicaciones se denomina protocolo.<br />
Se dice que un protocolo es abierto si el fabricante de un equipo ofrece la<br />
especificación de su protocolo en forma gratuita o a un precio razonable; o si<br />
existe una norma que defina esta especificación. En caso contrario, se dice que el<br />
protocolo es cerrado.<br />
En relación a los aspectos mecánicos, eléctricos y funcionales de la comunicación, la<br />
implementación de un esquema maestro-esclavo se basa con frecuencia en las normas<br />
RS-232 ó RS-485, que serán descriptas a continuación.<br />
5.1.1. RS-232 y RS-485<br />
La norma RS-232-C es la tercera revisión de la norma original RS-232.<br />
Fue propuesta por la Asociación de Industrias Electrónicas (Electronic Industry<br />
Association, EIA), e incluida en la recomendación V.24 del Comité Consultivo<br />
Internacional Telegráfico y Telefónico (Comité Consultatif Internationale<br />
Telégraphique et Téléphonique, CCITT), con unas pocas modificaciones en<br />
circuitos que rara vez se usan.<br />
Prácticamente cualquier computadora personal cuenta con una o varías interfases RS-<br />
232, utilizadas para la conexión de módems, impresoras láser, ratones (mouses), etc.<br />
Esta norma define las características mecánicas, eléctricas y funcionales de la interfase<br />
entre un Equipo Terminal de Datos (Data Terminal Equipment, DTE) y un Equipo de<br />
Comunicación de Datos (Data Comunication Equipment, DCE). Un DTE es un<br />
terminal al cual accede un usuario. Podría ser también un sistema que se comporta en<br />
forma similar, como por ejemplo, una computadora o un PLC. Un DCE es un módem<br />
(modulador / demodulador), que codifica la información digital en tonos de audio que<br />
puedan ser transmitidos por una línea telefónica.<br />
Los bits se transmiten en forma seriada, esto es, se utiliza un conductor para transmitir<br />
los bits uno a continuación del otro. Otro conductor es utilizado para recibir datos, y<br />
algunos conductores adicionales se utilizan para el control de la transmisión.
Desde un punto de vista mecánico, la forma especifica un conector de 25 pines o<br />
clavijas, conocido como DB25. Los 25 pines están distribuidos en dos filas, la primera<br />
de 13 pines numerados del 1 al 13, y la segunda de 12 pines, numerados del 14 al 25. La<br />
función de los circuitos principales es mostrada en la Fig. 5.2.<br />
Desde un punto de vista eléctrico, cada uno de estos pines se puede poner en 1 ó 0,<br />
según sea su nivel de tensión con referencia al pin 7. Una tensión inferior a -3V indica<br />
un 1, mientras que un nivel de tensión superior a + 4V indica un 0.<br />
Obsérvese que todos los circuitos comparan sus niveles de tensión con un único común,<br />
que es el pin 7. Esta técnica se denomina transmisión asimétrica, en oposición a la<br />
transmisión simétrica, que se presentará para el caso de la norma RS-485.<br />
Desde el punto de vista funcional, se definen funciones para cada uno de los circuitos.<br />
Mientras el DTE está encendido pone un 1 en el pin 20 (por medio de un nivel de<br />
tensión referido al pin 7 inferior a -3V), indicando que la Terminal de Datos está lista<br />
(Data Terminal Ready). En forma similar, al ser encendido el DCE pone un 1 en el pin 6<br />
(Módem listo, Data Set Ready).<br />
Cuando el módem (DCE) detecta una señal en la línea telefónica, pone un 1 en el pin 8<br />
(Detección de Portadora, Carrier Detect). De esta forma, el DTE se entera que el DCE<br />
esta recibiendo datos. El pin 4 (Solicitud de Envío, Request to Send) indica que el DTE,<br />
quiere enviar datos, mientras que el pin 5 (Libre para Enviar, Clear to Send) indica que<br />
el DCE esta en condiciones de recibirlos. Los pines 2 y 3 son utilizados para transmitir<br />
y recibir datos.<br />
La norma especifica funciones adicionales para otros pines, que permiten seleccionar la<br />
velocidad del módem, verificar su estado, etc. Con frecuencia, muchos de estos circuitos<br />
no son necesarios en la práctica.<br />
Figura 5.2 Circuitos de la norma RS – 232 C. Se indica entre paréntesis el número de
pin correspondiente. Las funciones (transmitir, recibir, etc.) se describen desde el<br />
punto de vista del DTE<br />
La transmisión de bits se concreta variando los niveles de tensión en el pin 2, de<br />
acuerdo a los datos a transmitir. La transmisión de cada bit puede implicar un cambio en<br />
el nivel de tensión (de menos de -3V a más de +4V, o viceversa), dependiendo del valor<br />
del bit interiormente transmitido. Por ejemplo, la transmisión de los bits 11111111 no<br />
implica cambio del nivel de tensión, mientras que la transmisión le los bits 10101010<br />
implica un cambio en el nivel de tensión por cada bit transmitido (Fig. 5.3.).<br />
La cantidad máxima de cambios del valor de la señal por segundo está limitada por la<br />
tecnología utilizada en la instalación, y se mide en baudios. Se define como baudio a la<br />
cantidad de cambios de la señal que pueden ser identificados en un segundo. Así, una<br />
velocidad de transmisión de 300 baudios indica una capacidad de identificar 300<br />
cambios por segundo.<br />
Otro término utilizado para indicar una velocidad de transmisión es el de bits por<br />
segundo (bps). En el caso que hemos presentado, la cantidad de bits por segundo que se<br />
puede transmitir coincide con la cantidad de cambios de señal por segundo que la<br />
instalación permite, por lo que la velocidad de transmisión se puede expresar<br />
indistintamente en baudios o bps (300 baudios = 300 bps). En la sección 5.5 se<br />
presentarán algunos casos en los que la velocidad expresada en bps no coincide<br />
numéricamente con la expresada en baudios.<br />
Por lo dicho, la velocidad de transmisión puede expresarse cuantitativamente en baudios<br />
o bps. También es usual referirse a la velocidad de la transmisión mediante el término<br />
ancho de banda (bandwidth). El ancho de banda refleja la capacidad de una red de<br />
transmitir información en un determinado tiempo. Una tecnología de mayor ancho de<br />
banda tendrá mayor capacidad de transmitir información. Así, decimos que RS – 232 no<br />
tiene un ancho de banda suficiente para una determinada aplicación, o que ATM<br />
incrementará el ancho de banda de las instalaciones existentes.<br />
Es común que dos equipos digitales traten de conectarse por medio de la norma<br />
RS – 232. Como ninguno de los dos e un módem, es necesario cruzar algunos de los<br />
conductores. De otro modo, ambos intentarán transmitir por el pin 2, sin éxito.<br />
Figura 5.3 Representación de bits por medio de niveles de tensión.
El cruzamiento de cables se hace utilizando un cable especial con los colectores<br />
convenientemente cruzados, o utilizando un módem nulo, que efectúa la cruzada de los<br />
cables (Fig. 5.4.). Adicionalmente, el puente entre los pines 4 y 5 hace que ambos<br />
equipos consideren que el otro esté siempre disponible para transmitir y recibir. Este<br />
puente es usual en aplicaciones maestro-esclavo, en las que la disponibilidad del medio<br />
está resuelta por la estación maestra, por lo que no es necesario chequearla antes de<br />
iniciar la transmisión.<br />
La norma RS-232 especifica los aspectos mecánicos, eléctricos y funcionales para la<br />
conexión de dos equipos, un DTE y un DCE. Existen numerosos ejemplos de aplicación<br />
de esta conexión, por cepillo, la conexión de un PLC con una PC. Pero, ¿qué ocurre<br />
cuando deseamos integrar a más de dos equipos en una red?. En este caso debemos<br />
recurrir al uso de módems, a razón de uno por cada equipo que deseamos conectar en la<br />
red (Fig. 5.5.).<br />
De esta forma, un módem recibe en su internase RS-232 un mensaje, y lo retransmite<br />
como tonos de audio por la línea telefónica. Todos los demás módems escuchan estos<br />
tonos de frecuencia, y los transmiten por sus interfases RS-232 a sus correspondientes<br />
DTE. Esta arquitectura se conoce como multicaída (multidrop).<br />
Cuando RS-232 fue desarrollada, la tecnología se basaba en tubos de vacío,<br />
requiriéndose niveles de tensión más bien altos (del orden de 6 V), e implementándose<br />
velocidades de comunicación de hasta 20 Kbaudios, en distancias de no más de 15<br />
metros. Las versiones posteriores de RS-232 mantuvieron esta especificación para<br />
asegurar compatibilidad con los productos existentes, aún cuando nuevas tecnologías<br />
permitirían superar estas limitaciones ( 115 Kbaudios ó mas ).<br />
La tecnología actualmente disponible permite (y a menudo exige) alcanzar mayores<br />
distancias y velocidades. Varias normas han surgido con este objetivo, de ellas, la más<br />
difundida en el ámbito industrial es la RS-485. Otra norma ampliamente difundida es la<br />
RS-422, que tiene pequeñas diferencias con la RS-485.<br />
Ambas normas se diferencian de la RS-232 en que utilizan una técnica de transmisión<br />
balanceada. En esta técnica cada circuito tiene dos hilos, sin que exista una tierra en<br />
común.<br />
Los unos y ceros lógicos se establecen en función de la diferencia de tensión entre<br />
ambos conductores del circuito (Fig. 5.6.). Se alcanzan así distancias de hasta 12OOm,<br />
con velocidades de hasta 2 Mbaudios.<br />
Otro aspecto que favorece a la norma RS-485 con respecto a la norma RS-232, es que<br />
permite la conexión de varios equipos al bus de comunicaciones.
Figura 5.4 Ejemplo de la implementación de la Norma RS – 232 entre dos equipos<br />
que se comportan como DTE.<br />
Figura 5.5 Bus de comunicaciones multidrop implementado con la norma RS-232 C<br />
y módems.
Los equipos se conectan en paralelo a los dos conductores que usualmente se utilizan en<br />
la implementación de este bus. De esta forma se elimina la necesidad del uso de<br />
módems en los casos en que se deben comunicar más de 2 equipos.<br />
La implementación industrial de redes RS-485 se realiza usualmente por medio de un<br />
par de conductores conectados a borneras, sin un conector especial.<br />
5.1.2 El acceso al medio físico<br />
El problema de acceso al medio físico surge desde el instante en que dos (o más)<br />
equipos digitales comparten el mismo medio físico. El problema es similar al de una<br />
conversación entre dos o más personas, que comparten el mismo medio físico (el aire).<br />
Existen diversos métodos para resolver este problema, Uno de los más sencillos es<br />
justamente el esquema maestro-esclavo. En este esquema el maestro tiene el control del<br />
acceso al medio, existiendo dos posibilidades: o es el maestro el que ocupa el medio<br />
físico, o es aquel esclavo que fue consultado por el maestro y le está respondiendo.<br />
5.1.3 Envío de mensajes<br />
La norma RS-232 (o cualquier otra norma que se utilice para resolver los aspectos<br />
mecánicos, eléctricos y funcionales de la comunicación) sólo se ocupa de la transmisión<br />
de una sucesión de bits. Estos bits no representan información alguna, en tanto no se los<br />
organice.<br />
Figura 5.6 Niveles de tensión de las normas RS-458 y RS-442<br />
Los bits se organizan generalmente en dos niveles. El primer nivel es un agrupamiento<br />
de unos pocos bits, por ejemplo, ocho. Este agrupamiento se conoce como carácter.<br />
Cada carácter es precedido de un bit de comienzo (start bit), y es seguido por un bit de<br />
paridad (parity bit, se trata de un bit opcional cuyo significado describiremos<br />
posteriormente), y uno o dos bits de finalización (stop bits). (Fig. 5.7.). Un aspecto que<br />
deberá ser definido a nivel de carácter por el protocolo es si el bit de mayor valor o peso<br />
es el primero que se transmite, o el último. Otro aspecto es el significado mismo de este
conjunto de bits. Por ejemplo, la secuencia 11111111 podría tener distintos significados<br />
en función de la codificación utilizada.<br />
Una de las codificaciones más comunes es la ASCII (American Standard Code for<br />
information Interchange, Código Americano Normalizado para el Intercambio de<br />
Información). Esta codificación fue introducida en 1963. En su versión actual utiliza 8<br />
bits, con un total de 256 caracteres, que incluyen letras minúsculas y mayúsculas,<br />
números, símbolos, y caracteres de control tales como STX (Start of Text, Comienzo<br />
del Texto), EOT (End of Text, Final del Texto), LF (Line Feed, Alimentación de Línea),<br />
etc.<br />
El segundo nivel de organización consiste en el agrupamiento de caracteres de una<br />
trama, que constituye el mensaje. Típicamente la trama contendrá caracteres que<br />
contienen la siguiente información: dirección del esclavo (ya sea en el mensaje de<br />
consulta o respuesta), copiando de consulta o respuesta, datos, y códigos de chequeo.<br />
Uno de los problemas a resolver es el de identificación del comienzo y el final de una<br />
trama. Para ello se pueden utilizar diversos métodos, algunos de los cuales se<br />
describirán a continuación.<br />
5.1.3.1. Transmisión sin delimitadores<br />
Este sencillo método consiste en agrupar todos los bits de una trama, y transmitirlos de<br />
una sola vez. El receptor observa los bits a medida que llegan, y mide el tiempo entre<br />
caracteres. Si deja de recibir bits durante un tiempo determinado (por ejemplo, el tiempo<br />
equivalente a la transmisión de tres y medio caracteres), asumirá que la trama se ha<br />
completado, y procederá al chequeo a nivel de trama (Fig. 5.8.). Este método es<br />
utilizado en el protocolo Modbus RTU.<br />
Continuará.....<br />
Nota de Radacción: El lector puede descargar el curso capítulo a capítulo desde la<br />
sección “Artículos Técnicos” dentro del sitio de EduDevices<br />
(www.edudevices.com.ar )