www.ro-cleandesmi.com МОДЕЛИ "RO-MOP OM 140 D"
www.ro-cleandesmi.com МОДЕЛИ "RO-MOP OM 140 D"
www.ro-cleandesmi.com МОДЕЛИ "RO-MOP OM 140 D"

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
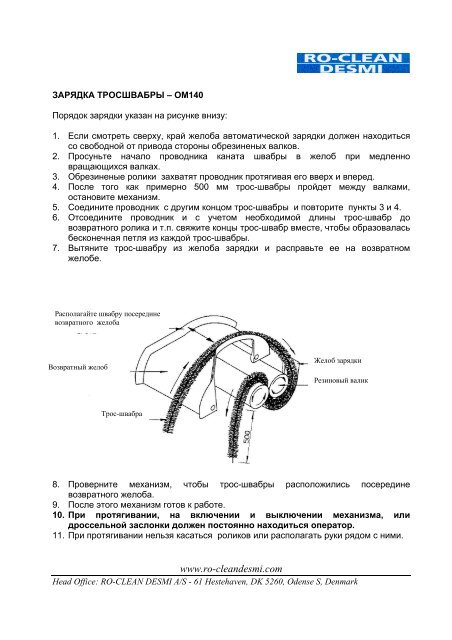
ЗАРЯДКА ТРОСШВАБРЫ – <strong>OM</strong><strong>140</strong><br />
Порядок зарядки указан на рисунке внизу:<br />
1. Если смотреть сверху, край желоба автоматической зарядки должен находиться<br />
со свободной от привода стороны обрезиненых валков.<br />
2. Просуньте начало проводника каната швабры в желоб при медленно<br />
вращающихся валках.<br />
3. Обрезиненые ролики захватят проводник протягивая его вверх и вперед.<br />
4. После того как примерно 500 мм трос-швабры пройдет между валками,<br />
остановите механизм.<br />
5. Соедините проводник с другим концом трос-швабры и повторите пункты 3 и 4.<br />
6. Отсоедините проводник и с учетом необходимой длины трос-швабр до<br />
возвратного ролика и т.п. свяжите концы трос-швабр вместе, чтобы образовалась<br />
бесконечная петля из каждой трос-швабры.<br />
7. Вытяните трос-швабру из желоба зарядки и расправьте ее на возвратном<br />
желобе.<br />
Располагайте швабру посередине<br />
возвратного желоба<br />
Возвратный желоб<br />
Желоб зарядки<br />
Резиновый валик<br />
Трос-швабра<br />
8. Проверните механизм, чтобы трос-швабры расположились посередине<br />
возвратного желоба.<br />
9. После этого механизм готов к работе.<br />
10. При протягивании, на включении и выключении механизма, или<br />
дроссельной заслонки должен постоянно находиться оператор.<br />
11. При протягивании нельзя касаться роликов или располагать руки рядом с ними.<br />
<st<strong>ro</strong>ng>www</st<strong>ro</strong>ng>.<strong>ro</strong>-<strong>cleandesmi</strong>.<strong>com</strong><br />
Head Office: <strong>RO</strong>-CLEAN DESMI A/S - 61 Hestehaven, DK 5260, Odense S, Denmark