LA TRANSFORMADA Z.pdf - José Luis Oropeza
LA TRANSFORMADA Z.pdf - José Luis Oropeza
LA TRANSFORMADA Z.pdf - José Luis Oropeza

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
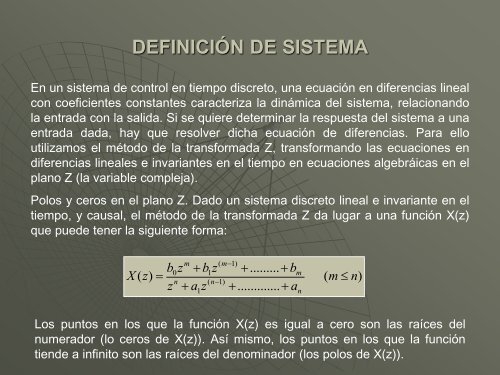
DEFINICIÓN DE SISTEMA<br />
En un sistema de control en tiempo discreto, una ecuación en diferencias lineal<br />
con coeficientes constantes caracteriza la dinámica del sistema, relacionando<br />
la entrada con la salida. Si se quiere determinar la respuesta del sistema a una<br />
entrada dada, hay que resolver dicha ecuación de diferencias. Para ello<br />
utilizamos el método de la transformada Z, transformando las ecuaciones en<br />
diferencias lineales e invariantes en el tiempo en ecuaciones algebráicas en el<br />
plano Z (la variable compleja).<br />
Polos y ceros en el plano Z. Dado un sistema discreto lineal e invariante en el<br />
tiempo, y causal, el método de la transformada Z da lugar a una función X(z)<br />
que puede tener la siguiente forma:<br />
m ( m1)<br />
b0 z b1<br />
z .........<br />
bm<br />
X ( z)<br />
<br />
( m n)<br />
n ( n1)<br />
z a z .............<br />
a<br />
1<br />
n<br />
Los puntos en los que la función X(z) es igual a cero son las raíces del<br />
numerador (lo ceros de X(z)). Así mismo, los puntos en los que la función<br />
tiende a infinito son las raíces del denominador (los polos de X(z)).