

Programación Concurrente Prácticas 1, 2 y 3 - Profe Saul
Programación Concurrente Prácticas 1, 2 y 3 - Profe Saul
Programación Concurrente Prácticas 1, 2 y 3 - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2 Programación <strong>Concurrente</strong><br />
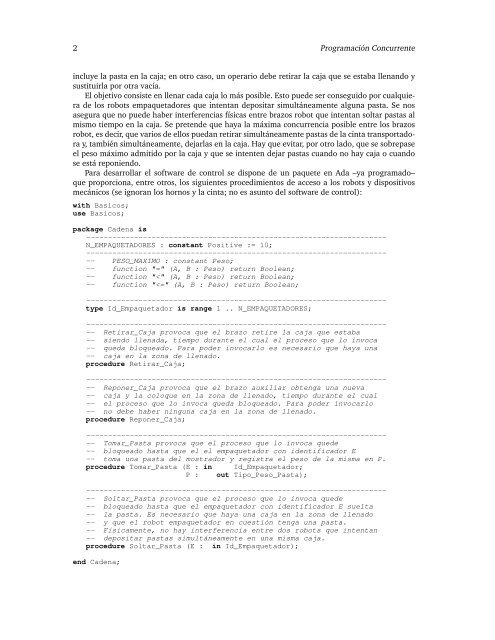
incluye la pasta en la caja; en otro caso, un operario debe retirar la caja que se estaba llenando y<br />
sustituirla por otra vacía.<br />
El objetivo consiste en llenar cada caja lo más posible. Esto puede ser conseguido por cualquiera<br />
de los robots empaquetadores que intentan depositar simultáneamente alguna pasta. Se nos<br />
asegura que no puede haber interferencias físicas entre brazos robot que intentan soltar pastas al<br />
mismo tiempo en la caja. Se pretende que haya la máxima concurrencia posible entre los brazos<br />
robot, es decir, que varios de ellos puedan retirar simultáneamente pastas de la cinta transportadora<br />
y, también simultáneamente, dejarlas en la caja. Hay que evitar, por otro lado, que se sobrepase<br />
el peso máximo admitido por la caja y que se intenten dejar pastas cuando no hay caja o cuando<br />
se está reponiendo.<br />
Para desarrollar el software de control se dispone de un paquete en Ada –ya programado–<br />
que proporciona, entre otros, los siguientes procedimientos de acceso a los robots y dispositivos<br />
mecánicos (se ignoran los hornos y la cinta; no es asunto del software de control):<br />
with Basicos;<br />
use Basicos;<br />
package Cadena is<br />
---------------------------------------------------------------------<br />
N_EMPAQUETADORES : constant Positive := 10;<br />
---------------------------------------------------------------------<br />
-- PESO_MAXIMO : constant Peso;<br />
-- function "=" (A, B : Peso) return Boolean;<br />
-- function "














