
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>CONTROL</strong> AUTOMÁTICO I<br />
SOLUCIÓN Segundo certamen<br />
TODAS LAS RESPUESTAS DEBEN ESTAR JUSTIFICADAS.<br />
TODAS LAS VARIABLES QUE USE EN SUS RESPUESTAS DEBEN ESTAR EXPLÍCI-<br />
TAMENTE DEFINIDAS.<br />
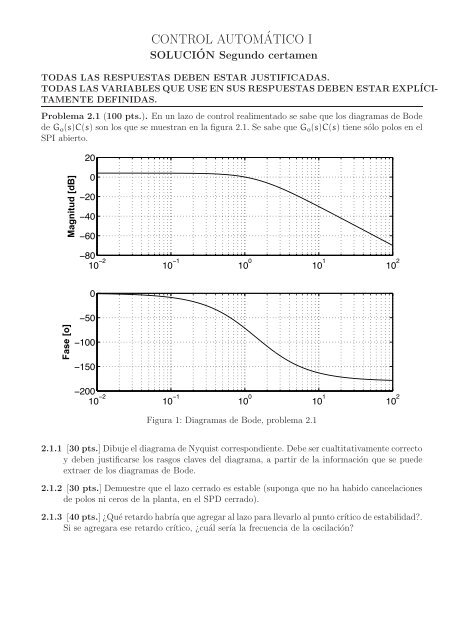
Problema 2.1 (100 pts.). En un lazo de control realimentado se sabe que los diagramas de Bode<br />
de G o (s)C(s) son los que se muestran en la figura 2.1. Se sabe que G o (s)C(s) tiene sólo polos en el<br />
SPI abierto.<br />
20<br />
Magnitud [dB]<br />
0<br />
−20<br />
−40<br />
−60<br />
−80<br />
10 −2 10 −1 10 0 10 1 10 2<br />
Fase [o]<br />
0<br />
−50<br />
−100<br />
−150<br />
−200<br />
10 −2 10 −1 10 0 10 1 10 2<br />
Figura 1: Diagramas de Bode, problema 2.1<br />
2.1.1 [30 pts.] Dibuje el diagrama de Nyquist correspondiente. Debe ser cualtitativamente correcto<br />
y deben justificarse los rasgos claves del diagrama, a partir de la información que se puede<br />
extraer de los diagramas de Bode.<br />
2.1.2 [30 pts.] Demuestre que el lazo cerrado es estable (suponga que no ha habido cancelaciones<br />
de polos ni ceros de la planta, en el SPD cerrado).<br />
2.1.3 [40 pts.]¿Qué retardo habría que agregar al lazo para llevarlo al punto crítico de estabilidad?.<br />
Si se agregara ese retardo crítico, ¿cuál sería la frecuencia de la oscilación?
Solución<br />
2.1.1 De los diagramas de Bode, y del hecho que G o (s)C(s) es estable, notamos lo siguiente:<br />
La magnitud decrece monótonamente a medida que ω crece, llegando a cero para ω = ∞.<br />
La magnitud es mayor que 1 en ω = 0; sin embargo, es menor que 1 cuando el diagrama<br />
polar de G o (jω)C(jω) ingresa al tercer cuadrante.<br />
El ángulo es negativo ∀ω ≥ 0, y se hace monótonamente más negativo a medida que ω<br />
crece<br />
El ángulo va desde 0 a −π [rad], recorriendo los cuadrantes 4 y 3, cuando ω va desde<br />
0a∞. Así, el diagrama polar de G o (jω)C(jω) nunca cruza el eje real negativo.<br />
Con estas observaciones podemos proponer el siguiente diagrama de Nyquist<br />
1.5<br />
Nyquist Diagram<br />
1<br />
0.5<br />
Imaginary Axis<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−1.5 −1 −0.5 0 0.5 1 1.5<br />
Real Axis<br />
Figura 2: Diagrama de Nyquist aproximado, problema 2.1<br />
2.1.2 Tanto del diagrama de Nyquist, como de los diagramas de Bode se aprecia que el margen de<br />
ganancia es infinito, y que el margen de fase es positivo. En consecuencia el lazo es estable.<br />
2.1.3 El retardo crítico es el que hace G o (jω c )C(jω c )=−1, paraalgún ω c ∈ R + , es decir, que<br />
hace la magnitud igual a 1, y la fase igual a −π. Para analizar este caso, consideremos los<br />
diagramas de Bode que se muestran en la Figura 2.1. Allí se aprecia que el margen de fase<br />
(y el de ganancia) puede ser llevado a cero si aumentamos la fase en −110 [o] app. en otras<br />
palabras, el retardo crítico, τ c se puede calcular a partir de<br />
ω c τ c = 110 pi<br />
180 ⇐⇒ τ c = 11<br />
18ω c<br />
π<br />
Se observa que ω c ≈ 1; por lo cual τ c ≈ 11<br />
18 π.<br />
Ahora bien, a la frecuencia ω c , se cumple que G o (jω c )C(jω c )=−1. Por otro lado, los polos<br />
del lazo cerrado cumplen con G o (s)C(s) =−1, lo cual indica que precisamente hay polos en<br />
±jω c .Así, la oscilación sería de frecuencia angular ω c .<br />
2
20<br />
Magnitud [dB]<br />
0<br />
−20<br />
−40<br />
−60<br />
−80<br />
10 −2 10 −1 10 0 10 1 10 2<br />
Fase [o]<br />
0<br />
−50<br />
−100<br />
−150<br />
−200<br />
10 −2 10 −1 10 0 10 1 10 2<br />
Figura 3: Diagramas de Bode, con margen de fase indicado, problema 2.1<br />
Problema 2.2 (100 pts.). Suponga que G o (s) =<br />
1<br />
s(s + 1)<br />
2.2.1 [50 pts.] ¿Se puede estabilizar un lazo cerrado con un controlador de la familia PID, que<br />
sólo contiene el modo integrativo?<br />
2.2.2 [50 pts.] Demuestre que esta planta es controlable en un lazo cerrado estable con un controlador<br />
PI. Proponga valores para K p y T r .<br />
Solución<br />
2.2.1 El controlador I tiene la función de transferencia C(s) = K I<br />
, por lo que el polinomio característico<br />
del lazo cerrado tendría la<br />
s<br />
expresión<br />
A cl (s) =s 3 + s 2 + K I<br />
De allí se observa que el lazo es inestable, porque en ese polinomio falta el término lineal en<br />
s.<br />
2.2.2 En este caso<br />
3
(<br />
C(s) =K p 1 + 1 )<br />
= K ps + K I<br />
T r s s<br />
La estabilidad se puede probar usando el algoritmo de Routh que arroja las condiciones<br />
Así, por ejemplo, se pueden elegir T r = 2 y K p = 2<br />
K p >K I ⇐⇒ T r >1 (1)<br />
K I >0⇐⇒ K p >0 (2)<br />
Problema 2.3 (100 pts.). Suponga que el modelo nominal de una planta estable es el mostrado<br />
en la figura 2.3.<br />
8<br />
6<br />
4<br />
DIAGRAMA DE NYQUIST<br />
EJE IMAGINARIO<br />
2<br />
0<br />
−2<br />
−4<br />
−6<br />
−8<br />
−10 −8 −6 −4 −2 0 2 4 6 8<br />
EJE REAL<br />
Figura 4: Diagrama de Nyquist, problema 2.3<br />
2.3.1 [40 pts.] Si esa planta se controla con un controlador proporcional de ganancia unitaria<br />
¿Cuántos polos tiene el lazo cerrado en el SPD?<br />
4
2.3.2 [60 pts.] ¿Qué ganancia K p de un controlador proporcional elegiría para que el margen de<br />
ganancia sea de 6 [dB] ?Sepidesólo cálculos aproximados<br />
Solución<br />
2.3.1 En este caso, dado que G o (s)C(s) =G o (s) es estable, no hay polos del lazo abierto en el<br />
SPD, es decir, P = 0. Observando el diagrama se aprecia que encierra el punto (−1; 0) dos<br />
veces en sentido de reloj, es decir N =−2. En consecuencia Z = P − N = 2, es decir, el lazo<br />
cerrado tiene dos polos en el SPD abierto.<br />
2.3.2 El margen requerido implica que el diagrama polar debe cruzar el eje real negativo en<br />
(−0,5; 0). Si consideramos que con ganancia 1 cruza el eje real negativo en (−8,5; 0) aprox.,<br />
entonce se requiere que<br />
K p = 0,5/8,5 = 1/17<br />
Problema 2.4 (100 pts.). Una planta estable tiene un modelo cuya incertidumber multiplicativa<br />
satisface<br />
2ω<br />
|G ∆ (jω)| ≤ √<br />
ω2 + 100<br />
2.4.1 [50 pts.] Determine el máximo ancho de banda de T o que asegura estabilidad robusta.<br />
2.4.2 [50 pts.] Determine el máximo ancho de banda que asegure<br />
|G ∆ (jω)T o (jω)| ≤ 0,8<br />
Sugerencia: SI NECESITA DIAGRAMAS DE BODE, USE APROXIMACIONES ASINTÓTI-<br />
CAS.<br />
Solución<br />
Este problema puede resolverse en forma analítica o en forma gráfica (como se estudió en clases).<br />
Para mayor variedad se presenta ahora la solución analítica<br />
2.4.1 La condición de estabilidad robusta se asegura si |T o (jω)G ∆ (jω)|
2.4.2 En este caso, repetimos el procedimiento, aunque numéricamente el cálculo de ω c es diferente,<br />
como se aprecia de las fórmulas<br />
|T o (jω)| ≤ 0,8<br />
√<br />
ω2 + 100<br />
2ω<br />
1<br />
2 = 0,16ω2 + 100<br />
ω 2 =⇒ ω c =<br />
4<br />
√<br />
0, 34<br />
Esto indica que para asegurar la condición de robustez dada, el ancho de banda debería ser<br />
4<br />
menor o igual que √ .<br />
0, 34<br />
6