
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
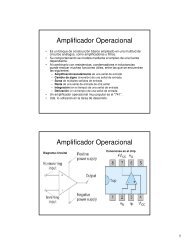
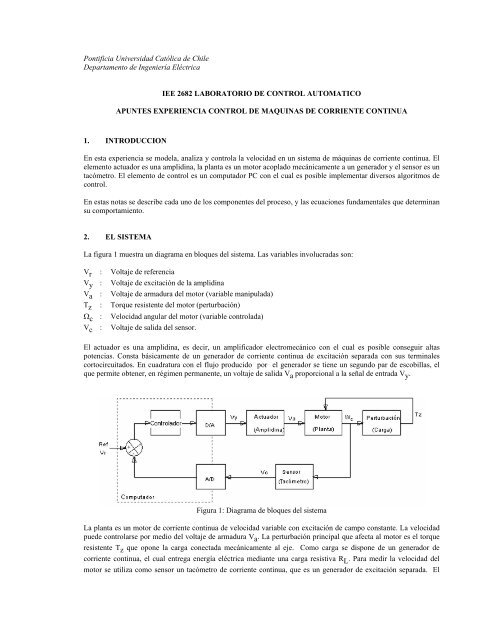
Pontificia Universidad Católica de ChileDepartamento de Ingeniería EléctricaIEE 2682 LABORATORIO DE CONTROL AUTOMATICOAPUNTES EXPERIENCIA CONTROL DE MAQUINAS DE CORRIENTE CONTINUA1. INTRODUCCIONEn esta experiencia se modela, analiza y controla la velocidad en un sistema de máquinas de corriente continua. Elelemento actuador es una amplidina, la planta es un motor acoplado mecánicamente a un generador y el sensor es untacómetro. El elemento de control es un computador PC con el cual es posible implementar diversos algoritmos decontrol.En estas notas se describe cada uno de los componentes del proceso, y las ecuaciones fundamentales que determinansu comportamiento.2. EL SISTEMALa figura 1 muestra un diagrama en bloques del sistema. Las variables involucradas son:V r : Voltaje de referenciaV y : Voltaje de excitación de la amplidinaV a : Voltaje de armadura del motor (variable manipulada)T z : Torque resistente del motor (perturbación)Ω c : Velocidad angular del motor (variable controlada)V c : Voltaje de salida del sensor.El actuador es una amplidina, es decir, un amplificador electromecánico con el cual es posible conseguir altaspotencias. Consta básicamente de un generador de corriente continua de excitación separada con sus terminalescortocircuitados. En cuadratura con el flujo producido por el generador se tiene un segundo par de escobillas, elque permite obtener, en régimen permanente, un voltaje de salida V a proporcional a la señal de entrada V y .Figura 1: Diagrama de bloques del sistemaLa planta es un motor de corriente continua de velocidad variable con excitación de campo constante. La velocidadpuede controlarse por medio del voltaje de armadura V a . La perturbación principal que afecta al motor es el torqueresistente T z que opone la carga conectada mecánicamente al eje. Como carga se dispone de un generador decorriente continua, el cual entrega energía eléctrica mediante una carga resistiva R L . Para medir la velocidad delmotor se utiliza como sensor un tacómetro de corriente continua, que es un generador de excitación separada. El
2controlador, por último, presenta cuatro modos de acción: manual, proporcional, integral y proporcional-integral.Los parámetros del controlador PI son ajustables dentro de rangos determinados.3. LA AMPLIDINALa figura 2 muestra el diagrama de conexión de la amplidina a ser utilizada en la experiencia, destacándose que lasbobinas L 1 , L 3 y L a están en cuadratura con respecto a la bobina L 11 . A los terminales x 1 - x 2 se conecta la señalde entrada V y . Los terminales x 3 - x 4 se emplean para realimentar el voltaje de salida de la amplidina. La bobina L apermite compensar totalmente el efecto producido por la corriente; de este modo se logra una independencia delvoltaje de salida V a de la corriente I a que entrega la amplidina. En estas condiciones la amplidina puede modelarsepor un sistema de primer orden.R11L11X1R1L1L3LaRaA1X2X3X4R3RrY1L 1L 2L 11L a: devanado de control: devanado de realimentación: devanado en cuadratura: devanado de compensaciónFigura 2: Diagrama de conexión de la amplidina4. EL MOTORPara determinar teóricamente el modelo deben considerarse en este caso tanto la ecuación de equilibrio mecánicacomo la ecuación de equilibrio eléctrica. Para el equilibrio del torque aplicado al eje debe cumplirse la ecuaciónen la cual se tiene:T m = T r + T I + T z (1)T m : Torque generado por el motorT r : Torque resistente debido al roceT I : Torque debido a la inercia JT z : Torque resistente debido a la carga (el generador).El torque motríz T m es proporcional a la corriente de armadura I a y a la corriente de campo, la cual en estaexperiencia se mantiene constante. Se cumple entoncesT m = K m * I a (2)Debido a fenómenos de saturación en el hierro del rotor y del estator de la máquina, K m varía con el punto deoperación.El torque opuesto al movimiento debido al roce es una función de la velocidad Ω c similar a la que se muestra en lafigura 3. Para variaciones pequeñas en torno al punto de operación puede considerarse que la relación es lineal, deganancia B.
3La figura 4 muestra el circuito eléctrico del motor, en el cual V a es el voltaje aplicado a la armadura y V a' la fuerzacontraelectromotriz producida por el movimiento del devanado de la armadura (rotor), proporcional al flujo delcampo y a la velocidad Ω c . Dado que la corriente de campo es constante,V a ' = K m * Ω c (3)En estado de régimen (Ω c e I a constantes) es posible expresar la velocidad en el eje Ω c como función del voltaje dealimentación V a para distintos valores del torque resistente T z producido por la carga resistiva R 1 . La figura 5muestra la dependencia (denominada curva característica del motor) entre Ω c y V a para diferentes cargas.Tr1BΩcFigura 3: Torque debido al roceΩ cLamRam+Va-Ia+Va'-Figura 4: Circuito del motor
4Ω [rpm]Tz=0 (Rl= )Tz=Tz1 (Rl=Rl1 )Tz=Tz2 (Rl=Rl2 )Va [volt]FiguraFigura5:5CurvaCurvacaracterísticacaracteristicaestáticaestatica5. EL GENERADOREl generador está acoplado al eje del motor, por lo cual sólo debe considerarse el equilibrio eléctrico. Si V g ' es lafuerza electromotriz generada, entoncesV g ' = K g Ω c (4)Como en el caso del motor, K g varía con el punto de operación debido a fenómenos de saturación.6. EL SENSORLas características del sensor son similares a las del generador. Para la medición casi no se consume corriente, deforma que la tensión generada es prácticamente proporcional a la velocidad; la curva de calibración, para unatensión de campo de 15 volt, se muestra en figura 6. Al tacómetro se ha incorporado un circuito RC con fines defiltrado.
5Ω [rmp/100]1110987550Ω100Ω6+54Vgs + -220uFVc-3211 2 3 4 5 6 7 8 9Figura 6: Curva de calibración del tacómetroVc[volts]7. REFERENCIASFitzgerald, A. E., Kingsley, C. Electric Machinery, Mc Graw Hill, 1961Thaler, G. J., Wilcox, M. L. Electric Machines: Dynamics and Steady State. John Wiley and Sons, 1966.Agosto 2004