Tarea 3 - Departamento de IngenierÃÂa Eléctrica - Universidad de La ...
Tarea 3 - Departamento de IngenierÃÂa Eléctrica - Universidad de La ...
Tarea 3 - Departamento de IngenierÃÂa Eléctrica - Universidad de La ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
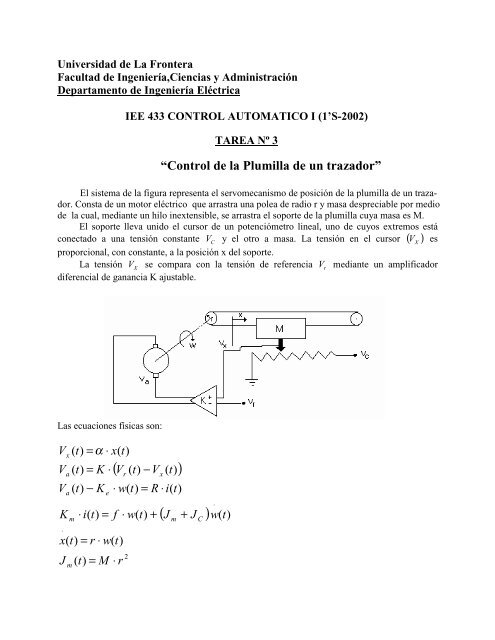
<strong>Universidad</strong> <strong>de</strong> <strong>La</strong> FronteraFacultad <strong>de</strong> Ingeniería,Ciencias y Administración<strong>Departamento</strong> <strong>de</strong> Ingeniería EléctricaIEE 433 CONTROL AUTOMATICO I (1’S-2002)TAREA Nº 3“Control <strong>de</strong> la Plumilla <strong>de</strong> un trazador”El sistema <strong>de</strong> la figura representa el servomecanismo <strong>de</strong> posición <strong>de</strong> la plumilla <strong>de</strong> un trazador.Consta <strong>de</strong> un motor eléctrico que arrastra una polea <strong>de</strong> radio r y masa <strong>de</strong>spreciable por medio<strong>de</strong> la cual, mediante un hilo inextensible, se arrastra el soporte <strong>de</strong> la plumilla cuya masa es M.El soporte lleva unido el cursor <strong>de</strong> un potenciómetro lineal, uno <strong>de</strong> cuyos extremos estáconectado a una tensión constante V Cy el otro a masa. <strong>La</strong> tensión en el cursor ( VX) esproporcional, con constante, a la posición x <strong>de</strong>l soporte.<strong>La</strong> tensión VXse compara con la tensión <strong>de</strong> referencia V rmediante un amplificadordiferencial <strong>de</strong> ganancia K ajustable.<strong>La</strong>s ecuaciones físicas son:VVVK⋅( t)= α ⋅ x(t)( t)= K ⋅( t)− K⋅ i(t)= fx(t)= r ⋅ w(t)Jxaamme( t)= M( V ( t)−V( t))⋅ w(t)= R ⋅ i(t)⋅ rr⋅ w(t)+2x( J + J )mC⋅w(t)
Siendo:f :coeficiente <strong>de</strong> roce viscosoJm :momento <strong>de</strong> inercia <strong>de</strong>l motorJc :momento <strong>de</strong> inercia <strong>de</strong> la cargaDATOS:V = 10 VKCα = 0.5V/ cmR = 5ΩM = 0.3 Kg .e= 0.09 V⋅ s/ radf = 0.2 ⋅10r = 1cm.KJcm= 10−5−3= 0.1N⋅m/AKg⋅mN⋅m⋅s/rad2Se pi<strong>de</strong>:1.- Determinar la función <strong>de</strong> transferencia entre la entrada X(s) y V r(s).2.- Diseñar y analizar los siguientes controladores mediante el Método <strong>de</strong> Ziegler y Nichols: P,PIy PID.3.- Diseñar y analizar un controlador PID mediante Murril y Smith.4.- Proponer y analizar un controlador mediante ajuste <strong>de</strong> Dahlin.5.- Comparar los distintos controladores diseñados.6.- Determinar el mejor controlador analizado y por qué lo eligió.7.- Conclusiones y observaciones.Indicaciones:Fecha <strong>de</strong> entrega ................................a las 17:00 en secretaria <strong>de</strong>l <strong>Departamento</strong> IngenieríaEléctrica.No olvi<strong>de</strong> que todo trabajo <strong>de</strong>be contener objetivos y conclusiones <strong>de</strong> acuerdo a losobjetivos planteados, <strong>de</strong>sarrollo teórico, <strong>de</strong>sarrollo experimental o <strong>de</strong> simulación,discusiones, etc.El trabajo es individual, escrito a mano (legible) y en cuar<strong>de</strong>nillo a cuadro <strong>de</strong> tamañooficio, con un máximo <strong>de</strong> 3 hojas (equivalente a 6 hojas <strong>de</strong> oficio); sin embargo las gráficas<strong>de</strong>ben ser originales no fotocopiadas e indicar claramente a que correspon<strong>de</strong>.