Frottement : les avancées du mouvement louvoyant - SWISS ...
Frottement : les avancées du mouvement louvoyant - SWISS ...
Frottement : les avancées du mouvement louvoyant - SWISS ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Recherche et développement_Robotique<br />
<strong>Frottement</strong> : <strong>les</strong> <strong>avancées</strong> <strong>du</strong> <strong>mouvement</strong> <strong>louvoyant</strong><br />
Dans le cadre de leurs recherches internes, l’équipe <strong>du</strong> professeur Reymond Clavel a développé un système<br />
basé sur le <strong>mouvement</strong> <strong>louvoyant</strong>, principe qui permet de limiter le frottement qui s’oppose au déplacement<br />
d’un corps solide sur un plan. Cette découverte permet de mettre en évidence une diminution significative <strong>du</strong><br />
frottement apparent. L’idée, géniale en l’occurrence, permet d’imaginer le développement de nombreuses<br />
applications. En avant-première pour Swiss Engineering RTS, <strong>les</strong> explications.<br />
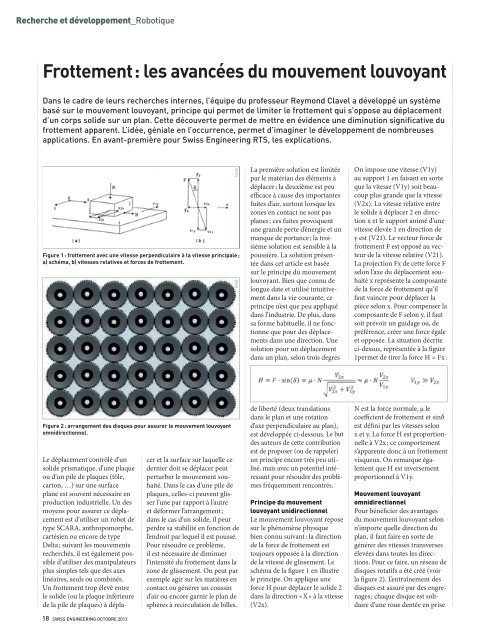
Figure 1 : frottement avec une vitesse perpendiculaire à la vitesse principale ;<br />
a) schéma, b) vitesses relatives et forces de frottement.<br />
Figure 2 : arrangement des disques pour assurer le <strong>mouvement</strong> <strong>louvoyant</strong><br />
omnidirectionnel.<br />
Le déplacement contrôlé d’un<br />
solide prismatique, d’une plaque<br />
ou d’un pile de plaques (tôle,<br />
carton, …) sur une surface<br />
plane est souvent nécessaire en<br />
pro<strong>du</strong>ction in<strong>du</strong>strielle. Un des<br />
moyens pour assurer ce déplacement<br />
est d’utiliser un robot de<br />
type SCARA, anthropomorphe,<br />
cartésien ou encore de type<br />
Delta ; suivant <strong>les</strong> <strong>mouvement</strong>s<br />
recherchés, il est également possible<br />
d’utiliser des manipulateurs<br />
plus simp<strong>les</strong> tels que des axes<br />
linéaires, seuls ou combinés.<br />
Un frottement trop élevé entre<br />
le solide (ou la plaque inférieure<br />
de la pile de plaques) à dépla-<br />
18 <strong>SWISS</strong> ENGINEERING OCTOBRE 2012<br />
lsro2<br />
lsro2<br />
cer et la surface sur laquelle ce<br />
dernier doit se déplacer peut<br />
perturber le <strong>mouvement</strong> souhaité.<br />
Dans le cas d’une pile de<br />
plaques, cel<strong>les</strong>-ci peuvent glisser<br />
l’une par rapport à l’autre<br />
et déformer l’arrangement ;<br />
dans le cas d’un solide, il peut<br />
perdre sa stabilité en fonction de<br />
l’endroit par lequel il est poussé.<br />
Pour résoudre ce problème,<br />
il est nécessaire de diminuer<br />
l’intensité <strong>du</strong> frottement dans la<br />
zone de glissement. On peut par<br />
exemple agir sur <strong>les</strong> matières en<br />
contact ou générer un coussin<br />
d’air ou encore garnir le plan de<br />
sphères à recirculation de bil<strong>les</strong>.<br />
La première solution est limitée<br />
par le matériau des éléments à<br />
déplacer ; la deuxième est peu<br />
effi cace à cause des importantes<br />
fuites d’air, surtout lorsque <strong>les</strong><br />
zones en contact ne sont pas<br />
planes ; ces fuites provoquent<br />
une grande perte d’énergie et un<br />
manque de portance ; la troisième<br />
solution est sensible à la<br />
poussière. La solution présentée<br />
dans cet article est basée<br />
sur le principe <strong>du</strong> <strong>mouvement</strong><br />
<strong>louvoyant</strong>. Bien que connu de<br />
longue date et utilisé intuitivement<br />
dans la vie courante, ce<br />
principe n’est que peu appliqué<br />
dans l’in<strong>du</strong>strie. De plus, dans<br />
sa forme habituelle, il ne fonctionne<br />
que pour des déplacements<br />
dans une direction. Une<br />
solution pour un déplacement<br />
dans un plan, selon trois degrés<br />
de liberté (deux translations<br />
dans le plan et une rotation<br />
d’axe perpendiculaire au plan),<br />
est développée ci-dessous. Le but<br />
des auteurs de cette contribution<br />
est de proposer (ou de rappeler)<br />
un principe encore très peu utilisé,<br />
mais avec un potentiel intéressant<br />
pour résoudre des problèmes<br />
fréquemment rencontrés.<br />
Principe <strong>du</strong> <strong>mouvement</strong><br />
<strong>louvoyant</strong> unidirectionnel<br />
Le <strong>mouvement</strong> <strong>louvoyant</strong> repose<br />
sur le phénomène physique<br />
bien connu suivant : la direction<br />
de la force de frottement est<br />
toujours opposée à la direction<br />
de la vitesse de glissement. Le<br />
schéma de la fi gure 1 en illustre<br />
le principe. On applique une<br />
force H pour déplacer le solide 2<br />
dans la direction « X » à la vitesse<br />
(V2x).<br />
On impose une vitesse (V1y)<br />
au support 1 en faisant en sorte<br />
que la vitesse (V1y) soit beaucoup<br />
plus grande que la vitesse<br />
(V2x). La vitesse relative entre<br />
le solide à déplacer 2 en direction<br />
x et le support animé d’une<br />
vitesse élevée 1 en direction de<br />
y est (V21). Le vecteur force de<br />
frottement F est opposé au vecteur<br />
de la vitesse relative (V21).<br />
La projection Fx de cette force F<br />
selon l’axe <strong>du</strong> déplacement souhaité<br />
x représente la composante<br />
de la force de frottement qu’il<br />
faut vaincre pour déplacer la<br />
pièce selon x. Pour compenser la<br />
composante de F selon y, il faut<br />
soit prévoir un guidage ou, de<br />
préférence, créer une force égale<br />
et opposée. La situation décrite<br />
ci-dessus, représentée à la fi gure<br />
1permet de tirer la force H = Fx :<br />
N est la force normale, μ le<br />
coeffi cient de frottement et sinδ<br />
est défi ni par <strong>les</strong> vitesses selon<br />
x et y. La force H est proportionnelle<br />
à V2x ; ce comportement<br />
s’apparente donc à un frottement<br />
visqueux. On remarque également<br />
que H est inversement<br />
proportionnel à V1y.<br />
Mouvement <strong>louvoyant</strong><br />
omnidirectionnel<br />
Pour bénéfi cier des avantages<br />
<strong>du</strong> <strong>mouvement</strong> <strong>louvoyant</strong> selon<br />
n’importe quelle direction <strong>du</strong><br />
plan, il faut faire en sorte de<br />
générer des vitesses transverses<br />
élevées dans toutes <strong>les</strong> directions.<br />
Pour ce faire, un réseau de<br />
disques rotatifs a été créé (voir<br />
la fi gure 2). L’entraînement des<br />
disques est assuré par des engrenages<br />
; chaque disque est solidaire<br />
d’une roue dentée en prise
Figure 3 : principe <strong>du</strong> <strong>mouvement</strong><br />
<strong>louvoyant</strong> dans la direction x avec<br />
des disques rotatifs.<br />
lsro2<br />
avec cel<strong>les</strong> associées aux disques<br />
voisins ; un moteur entraîne<br />
l’ensemble. Dans la version à<br />
engrenage la plus simple, chaque<br />
disque tourne dans le sens<br />
opposé de ses voisins. D’autres<br />
solutions d’entraînement sont<br />
bien évidemment envisageab<strong>les</strong><br />
(courroies, biel<strong>les</strong>, …).<br />
Au vu des sens de rotation<br />
opposés de chacun des disques<br />
(figure 3), l’effet des forces de<br />
frottement in<strong>du</strong>ites (forces Fy<br />
selon la figure 1) sur <strong>les</strong> corps<br />
posés sur <strong>les</strong> disques s’annulent.<br />
Suivant la position relative<br />
charge-disques, il peut y avoir<br />
quelques forces parasites <strong>du</strong>es à<br />
une petite inégalité des composantes<br />
des forces de frottement ;<br />
il peut être utile d’assurer un<br />
léger guidage des corps posés<br />
sur <strong>les</strong> disques. Un ressort préchargé<br />
disposé entre chacun des<br />
disques et la base assure une<br />
force plus régulière entre <strong>les</strong><br />
disques et le corps à déplacer ;<br />
cette solution permet d’absorber<br />
<strong>les</strong> variations de planéité <strong>du</strong><br />
corps à déplacer. Cette solution,<br />
testée sur le démonstrateur, n’a<br />
pas apporté de changement de la<br />
valeur <strong>du</strong> frottement apparent,<br />
mais elle a apporté un avantage<br />
significatif en termes de stabilité.<br />
Pour que la vitesse de contact<br />
disque – solide à déplacer soit<br />
bien maîtrisée et assez élevée,<br />
la partie supérieure des disques<br />
est dégagée sur la partie centrale<br />
(figure 4). L’engrenage et sa<br />
partie supérieure peuvent être<br />
réalisés par injection de matière<br />
synthétique, par exemple <strong>du</strong><br />
POM (Delrin®) ; on diminue<br />
ainsi le risque d’endommager <strong>les</strong><br />
corps à déplacer.<br />
Tests et résultats<br />
Des essais ont été faits avec une<br />
table de format A4 sur laquelle<br />
35 disques en POM (Delrin) ont<br />
été placés (figure 5) ; le diamètre<br />
de la zone de contact <strong>du</strong> disque<br />
avec le corps à déplacer est<br />
d’environ 40 mm. Les disques,<br />
entraînés par engrenages droits<br />
tournent à 1’000 tours/min,<br />
ce qui représente une vitesse<br />
tangentielle de l’ordre de 2 m/s.<br />
Chacun des disques tourne en<br />
sens opposé par rapport à ses<br />
voisins directs. Un carton avec<br />
une charge plus ou moins grande<br />
a été utilisé comme élément de<br />
test (voir figure 5).<br />
Les mesures <strong>du</strong> coefficient<br />
de frottement <strong>du</strong> carton sur <strong>les</strong><br />
disques à l’arrêt donnent une<br />
valeur moyenne de 0,22. Avec<br />
<strong>les</strong> disques en rotation à 1’000<br />
tours par minute, le cœfficient de<br />
frottement apparent descend à<br />
moins de 0,05, soit un gain d’un<br />
facteur 4,5. Lors de ces tests, des<br />
petits <strong>mouvement</strong>s parasites <strong>du</strong><br />
carton ont été remarqués. Ce<br />
Figure 4 : coupe <strong>du</strong> système de disques rotatifs ; un ressort pré-chargé<br />
permet d’homogénéiser la force normale d’appui sur <strong>les</strong> disques ; la forme<br />
particulière de la partie supérieure des disques assure une vitesse de<br />
contact bien définie et suffisante pour un bon fonctionnement <strong>du</strong> système à<br />
<strong>mouvement</strong> <strong>louvoyant</strong> ; l’appui <strong>du</strong> ressort sur le disque par l’intermédiaire<br />
d’une bille limite le frottement dans le système ; une optimisation <strong>du</strong><br />
diamètre et de la forme des axes contribuera également à la diminution<br />
des pertes d’énergie.<br />
lsro2<br />
problème n’est pas très important,<br />
dans la mesure où le carton<br />
ou la pile de plaques sont déplacés<br />
par un robot qui assure le<br />
<strong>mouvement</strong> horizontal désiré.<br />
Des essais faits avec des disques<br />
tournant dans le même sens ont<br />
donné <strong>les</strong> mêmes résultats en<br />
termes de frottement, mais une<br />
instabilité plus marquée a été<br />
constatée. Les corps de petite<br />
dimension que l’on veut déplacer<br />
ont tendance à se mettre en<br />
rotation dans cette situation. La<br />
solution avec <strong>les</strong> disques en rotation<br />
opposée est donc meilleure<br />
que celle avec <strong>les</strong> disques tournant<br />
dans le même sens. Durant<br />
<strong>les</strong> quelques tests de principe<br />
effectués, aucune marque significative<br />
n’a été constatée au<br />
niveau de la surface de contact<br />
<strong>du</strong> carton.<br />
Diminution significative <strong>du</strong><br />
frottement apparent<br />
Ce premier démonstrateur de<br />
principe a permis de mettre en<br />
évidence une diminution significative<br />
<strong>du</strong> frottement apparent<br />
(qui s’oppose au déplacement<br />
<strong>du</strong> corps considéré) grâce au<br />
mouve ment <strong>louvoyant</strong> (facteur<br />
d’environ 4.5). De plus ce système<br />
fonctionne parfaitement<br />
et de façon uniforme pour des<br />
<strong>mouvement</strong>s dans n’importe<br />
quelle direction <strong>du</strong> plan.<br />
La forme, l’espacement, la taille<br />
des disques et la vitesse devront<br />
être optimisés en fonction<br />
des cas d’applications. Il est<br />
important de minimiser l’énergie<br />
consommée en limitant la<br />
vitesse au niveau de la zone de<br />
contact tout en assurant une<br />
diminution suffisante <strong>du</strong> frottement<br />
qui s’oppose au déplacement<br />
<strong>du</strong> corps. Pour <strong>les</strong> cas où<br />
la table est de grande dimension,<br />
il est avantageux que l’entrainement<br />
des disques soit sectorisé<br />
pour limiter le bruit, l’usure et la<br />
puissance consommée.<br />
L’utilisation de rouleaux à axes<br />
parallè<strong>les</strong> horizontaux à la place<br />
des disques peut con<strong>du</strong>ire à une<br />
solution intéressante. Ces derniers<br />
sont distribués en deux<br />
groupes; un rouleau sur deux<br />
appartient à chaque groupe ;<br />
chacun de ces deux groupes est<br />
entrainé de façon indépendante ;<br />
tous <strong>les</strong> cylindres d’un groupe<br />
lsro2<br />
Figure 5 : photo de la surface de<br />
travail <strong>du</strong> démonstrateur formée<br />
de 35 disques entraînés en rotation,<br />
chacun des disques tournant dans le<br />
sens opposé de celui de ses voisins<br />
directs.<br />
tournent dans le même sens.<br />
Lorsque <strong>les</strong> cylindres des deux<br />
groupes tournent dans le même<br />
sens, <strong>les</strong> corps se déplacent selon<br />
la vitesse tangentielle générée en<br />
surface des cylindres, l’ensemble<br />
se comporte comme une bande<br />
transporteuse. Si <strong>les</strong> deux groupes<br />
de cylindres sont entrainés en<br />
sens opposé, on se retrouvera<br />
dans la situation <strong>du</strong> <strong>mouvement</strong><br />
<strong>louvoyant</strong> et il sera facile de<br />
déplacer <strong>les</strong> corps dans la direction<br />
transverse (direction correspondant<br />
à celle de l’axe des<br />
cylindres).<br />
Les rouleaux peuvent également<br />
être montés sur des supports<br />
intégrant un ressort préchargé<br />
afin d’homogénéiser la force<br />
d’appui entre <strong>les</strong> rouleaux et le<br />
corps à déplacer.<br />
Cette solution à rouleaux n’a<br />
pas encore été testée, mais en<br />
vertu <strong>du</strong> fait que le principe <strong>du</strong><br />
<strong>mouvement</strong> <strong>louvoyant</strong> avec des<br />
disques rotatifs a confirmé la<br />
base théorique, ses chances de<br />
succès sont très importantes. La<br />
combinaison permettant d’utiliser<br />
<strong>les</strong> rouleaux tournant tous<br />
dans le même sens pour assurer<br />
le déplacement dans une direction<br />
et tournant en sens inverse<br />
pour faciliter un déplacement<br />
transverse permet d’imaginer de<br />
nombreuses applications.<br />
David Lengacher<br />
Willy Maeder<br />
Reymond Clavel<br />
EPFL<br />
Laboratoire de systèmes robotiques<br />
(LSRO2)<br />
http://lsro.epfl.ch<br />
<strong>SWISS</strong> ENGINEERING OCTOBRE 2012 19