

Banc d'essais dynamos - Hackerschicken
Banc d'essais dynamos - Hackerschicken
Banc d'essais dynamos - Hackerschicken

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
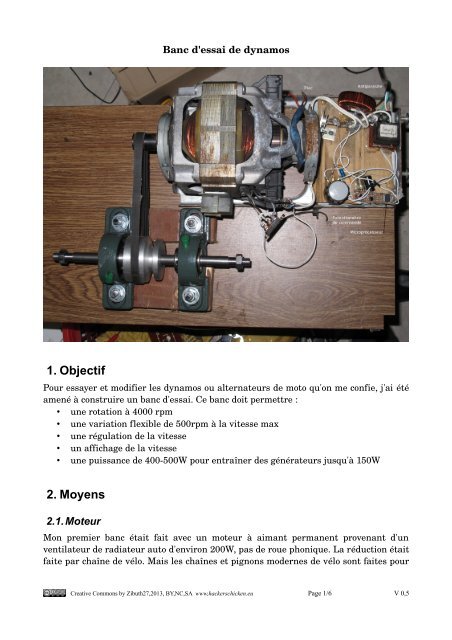
1. Objectif<br />
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
Pour essayer et modifier les <strong>dynamos</strong> ou alternateurs de moto qu'on me confie, j'ai été<br />
amené à construire un banc d'essai. Ce banc doit permettre :<br />
• une rotation à 4000 rpm<br />
• une variation flexible de 500rpm à la vitesse max<br />
• une régulation de la vitesse<br />
• un affichage de la vitesse<br />
• une puissance de 400500W pour entraîner des générateurs jusqu'à 150W<br />
2. Moyens<br />
2.1.Moteur<br />
Mon premier banc était fait avec un moteur à aimant permanent provenant d'un<br />
ventilateur de radiateur auto d'environ 200W, pas de roue phonique. La réduction était<br />
faite par chaîne de vélo. Mais les chaînes et pignons modernes de vélo sont faites pour<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 1/6 V 0,5
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
faciliter le déraillement par le « dérailleur », ce qui nécessite un alignement parfait des<br />
pignons et la vitesse est trop forte pour cet usage. Après des déraillements multiples,<br />
j'ai fini par changer de montage.<br />
La solution la plus flexible est faite à base d'un moteur « universel » à stator et rotor<br />
bobinés et charbons. En cherchant j'ai trouvé des moteurs d'aspirateur ou de machine<br />
à laver. Mon choix s'est porté sur la moteur de machine à laver de construction<br />
sérieuse que j'avais à la cave. Il est peu usé, avec quelques traces de rouille. Il permet<br />
un entraînement facile par courroie polyV et donc une réduction. Le profil de la poulie<br />
déjà montée en bout d'arbre est un profil J (pas des V à 3,84mm) La courroie d'origine<br />
est beaucoup trop grande, j'ai donc commandé une courroie de 406mm permettant un<br />
banc pas trop encombrant.<br />
Le moteur possède aussi une roue phonique (dynamo tachymétrique) en fait un<br />
alternateur à aimant permanent à l'autre extrémité de l'arbre qui génère 8<br />
alternances sinusoidales par tour moteur, déjà prévue pour la régulation du moteur.<br />
2.2.Réduction et arbres<br />
La réduction est faite par pouliescourroie avec un rapport de 2, 69 hors ripage. La<br />
vitesse max du moteur est donnée pour 13800rpm, on atteint donc 4000rpm en sortie<br />
pour 10750rpm moteur. La poulie de sortie est montée sur deux paliers à roulements à<br />
billes largement surdimensionnés, je serais en principe tranquille. La poulie de sortie<br />
a été tournée (merci JeanMarie!) pour entraîner éventuellement une courroie<br />
ordinaire de 10mm.<br />
Réduction entre roue phonique et arbre de sortie<br />
rapport de 2,69 compte tenu des 8 alternances/tour<br />
moteur<br />
L'arbre de sortie a été tourné (merci JeanMarie!) pour monter la dynamo des deux<br />
cotés et inverser ainsi mécaniquement le sens de rotation. Bien qu'il s'agisse d'un<br />
moteur série avec les induits et inducteurs accessibles, je préfère faire tourner le<br />
moteur dans un seul sens car les charbons sont « inclinés » et ne convergent pas sur<br />
l'axe. Une inversion temporaire est toujours possible par inversion électrique du stator.<br />
Les arbres de sortie ont deux diamètres 10 et 12mm pour monter la dynamo sous test<br />
à l'aide d'un tuyau de caoutchouc relativement raide (tuyau d'alimentation carburant).<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 2/6 V 0,5
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
Ce tuyau facilite l'alignement en apportant une tolérance de montage, axialité et<br />
angle.<br />
2.3.Electronique<br />
L'électronique utilise une commande par angle de phase et triac. Le montage classique<br />
de cette commande est largement utilisé dans les variateurs de puissance (gradateurs)<br />
fréquemment vendus à bas prix pour l'éclairage halogène. Cette électronique très<br />
simple est inadaptée ici car elle ne commence pas à puissance zéro : en effet il y a un<br />
risque important d'àcoups violents si la phase de commande, au lieu d'arriver en<br />
toute fin d'alternance, arrive en tout début de l'alternance suivante. On a alors la<br />
puissance max quand on ne la souhaite pas, le résultat est assez brutal !!<br />
Pour avoir une commande sur toute la plage de vitesses, et uniquement dans<br />
l'alternance en cours, j'ai utilisé un microprocesseur. Pour éviter l'utilisation d'une<br />
horloge à quartz, le logiciel est autoadaptatif et tolère même une certaine fluctuation<br />
de la fréquence secteur. Selon mes habitudes, et guidé par le prix des moyens de<br />
développement (compilateur et outils de programmation gratuits sous Linux, gratuit<br />
lui aussi) j'utilise des microcontrôleurs Atmel de la famille AVR : le petit Attiny13<br />
(qu'on peut trouver à 1,5€ par poignées de dix) suffit à cette tache.<br />
Il est commandé par un potentiomètre (sera remplacé par une commande analogique<br />
issue du régulateur de vitesse) qui est lu en mode ratiométrique par un convertisseur<br />
analogique/digital du processeur, dont une lecture en 8 bit (sur les 10 possibles) suffit.<br />
Un circuit détecte le passage à zéro du secteur : début de l'alternance et interruption<br />
du processeur.<br />
x=2ms/div<br />
y=2V/div<br />
On est sûr avec ce montage, que l'instant exact du passage à zéro est à l'intérieur (en<br />
principe au milieu) de l'impulsion produite.<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 3/6 V 0,5
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
Un « PWM » logiciel (modulation en largeur d'impulsion) produit l'impulsion du triac<br />
au moment voulu.<br />
L'impulsion est acheminée au triac, qui est relié directement au secteur par un petit<br />
transformateur d'isolement vite fabriqué (deux fois cinq spires dans un petit tore<br />
ferrite). On sépare ainsi les circuits électroniques, alimentés en 5V, du secteur.<br />
Programmation des « fuses » de l'at tiny13<br />
lfuse 6a (origine) passe à 0x7a (vitesse max de 9,6MHz interne, nécessaire pour que le<br />
compteur cycle à 256 x 40µs à l'intérieur de l'alternance)<br />
Il y a une imbrication intéressante des fonctions et des interruptions, le temps réel est<br />
entièrement assuré par la programmation du processeur (pas de BIOS ni d'OS dans la<br />
micromémoire du microcontroleur)<br />
2.4.Fonctions du logiciel<br />
Interruptions :<br />
PCINT0<br />
interruption chaque passage à zero du secteur (alternance)<br />
240ns toutes les 10ms<br />
RAZ des variables trigg et triggered<br />
limitation de tmax à 255<br />
TIM0 OVF<br />
interruption toutes les 40µs + delai 11µs c'est une constante ajoutée au taux de<br />
division du compteur, permet l'ajustement fin du nombre d'impulsions par alternance<br />
incrémentation du compteur de pulses (variable trigg)<br />
déclechement triac (à trigg=tmax)<br />
mémorisation de l'état déclenché: une seule impulsion par alternance<br />
main()<br />
déclarations<br />
initialisation timer<br />
initialisation ADC<br />
validation interruptions<br />
boucle perpétuelle : while(1)<br />
mesure potentiomètre (4 mesures à 3ms d'écart, division par 4)<br />
la valeur du potentiomètre devient le nombre de pulses avant déclenchement triac<br />
remarques :<br />
deux phases critiques :<br />
• juste après le zéro = puissance maxi. Le déclenchement du triac doit arriver<br />
juste après le zéro (qui est vers le milieu du zero pulse)<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 4/6 V 0,5
• juste avant le zéro = puissance mini<br />
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
sécurité en empêchant le trigger pendant l'impulsion de zero volt<br />
très sensible à la différence de fréquence secteur – tiny13<br />
l'horloge interne est sensible à la température +10 % et donc capable de déclencher<br />
n'importe quand.<br />
Il faut absolument éviter que la commande mini déclenche le triac au début de<br />
l'alternance suivante (= un coup de maxi brutal) d'où un autoajustement par<br />
modification, quand nécessaire, de la constante ajoutée dans la boucle TIM0 ovf.<br />
Ce logiciel qui compense les variations de l'horloge interne fonctionne en<br />
multiplicateur de fréquence synchronisé ou boucle asservie en phase (PLL), il permet<br />
aussi de compenser les variations (lentes) de fréquence du secteur et donc de<br />
fonctionner sur un 220V non fourni par EdF (groupes électrogènes ou capteurs<br />
solaires).<br />
2.5.Résultats<br />
très grande souplesse de commande, le moteur démarre et tient à 1 tour/seconde<br />
(60 rpm)<br />
3. Régulation - Affichage<br />
Réalisés dans un module existant (Tuxgraphics 3digit LED display), animé par un<br />
microcontrôleur Atmega8, amplement suffisant pour le boulot à faire.<br />
C'est un affichage à LED bien visible en atelier et suffisant en digits :<br />
• 3 digits suffisent pour afficher jusqu'à 10000rpm, le dernier digit est inutile,<br />
sauf pour ceux qui croient qu'un affichage digital est par nature plus précis<br />
qu'un analogique<br />
• il n'y a pas d'autre indication utile à afficher<br />
Le seul affichage qui pourrait présenter un quelconque intérêt serait la puissance<br />
délivrée par le moteur. A ce niveau un ampèremètre AC sur le 220V devrait suffire<br />
pour une valeur indicative.<br />
3.1.Objectifs affichage<br />
L'affichage sur trois digits nécessite une base de temps à quartz (la dérive naturelle<br />
du microprocesseur est de + 10 %, trop forte pour la mesure envisagée).<br />
L'affichage calcule directement la vitesse dynamo quel que soit le rapport de réduction<br />
de la courroie.<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 5/6 V 0,5
3.2.Objectifs régulation<br />
<strong>Banc</strong> d'essai de <strong>dynamos</strong><br />
Ramener le régime à la valeur de consigne quand la charge électrique ou mécanique de<br />
la dynamo varie<br />
3.3.Réalisation<br />
en cours<br />
zibuth27@gmx.fr<br />
Creative Commons by Zibuth27,2013, BY,NC,SA www,hackerschicken.eu Page 6/6 V 0,5











