

FFA/FPA Sistemi di feedback motore FFA/FPA Motor Feedback ...
FFA/FPA Sistemi di feedback motore FFA/FPA Motor Feedback ...
FFA/FPA Sistemi di feedback motore FFA/FPA Motor Feedback ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Servomoteurs Servoantriebe, &-<strong>motore</strong>n Contrôleurs & -regler<br />
Servoattuatori, Actuators, <strong>Motor</strong>i <strong>Motor</strong>s e Servodrives & Controllers<br />
<strong>FFA</strong>/<strong>FPA</strong> <strong>Sistemi</strong> <strong>Motor</strong> <strong>di</strong> <strong>Feedback</strong> <strong>feedback</strong> Systems <strong>motore</strong><br />
Codeur Inkrementeller incrémental Sinus/Cosinus Encoder<br />
Encoder Incremental sinusoidale Sine/Cosine incrementale Encoder<br />
Ce Dieses codeur <strong>Motor</strong><strong>feedback</strong>-System est basé sur un codeur basiert optique auf incrémental einem optischen, avec piste<br />
de inkrementellen commutation Drehgeber analogique, mit compatible analoger avec Kommutierungsspur<br />
les équipements<br />
de und contrôle/commande stellt <strong>di</strong>e Kompatibilität SIMODRIVE zu SIMODRIVE 611D®/611U® 611D®/611U®, et SIMO-<br />
SIMOVERT MASTERDRIVES®.<br />
her.<br />
Données Technische techniques Daten ERN ERN 1185/1387 (E2048)<br />
This Questo motor encoder <strong>feedback</strong> sinusoidale system è is basato based su on un an encoder optical, ottico incremental incrementale<br />
with con segnali analogue analogici commutation sin/cos track per and la commutazione provides compa-<br />
del<br />
encoder<br />
tibility <strong>motore</strong> with e sono the SIMODRIVE compatibili 611D®/611U®, con i SIMODRIVE SIMOVERT 611D®/ MASTER- 611U®,<br />
SIMOVERT DRIVES® controllers MASTERDRIVES®. .<br />
Dati Technical tecnici Data ERN ERN 1185/1387 (E2048) (E2048)<br />
#%20Tableau #%20Tabelle / Table Tabella 385.1 385.1<br />
Spannungs- Tension Tensione <strong>di</strong> alimentazione<br />
Power supply<br />
5 V 5 ± V 5 ± % 5 ;% max. ; max. 150 150 mA mA (sans (ohne charge Last / senza no load) carico)<br />
d‘alimentation versorgung<br />
2048 x A + B; 1 Vss ± 20 %; Z 0 = 120 Ω<br />
Signaux incrémentaux<br />
Inkrementalsignale Segnali Incremental incrementali signals<br />
2 sinusoidal segnali sinusoidali signals A A and e B. B.<br />
2 annähernd sinusförmige Signale.<br />
2 signaux sinusoïdaux A et B en quadrature<br />
A segue lags B B with in caso clockwise <strong>di</strong> rotazione rotation in of senso the<br />
A nacheilend zu B bei rechtsdrehendem Abtriebsflansch<br />
orario della output flangia flange <strong>di</strong> uscita<br />
R : 0,5 V Z 0 = 120 Ω<br />
Signal Referenzsignal de référence Segnale Reference <strong>di</strong> riferimento signal<br />
1 Signal R pro par Umdrehung tour moteur 1 signal R per revolution<br />
C + D; 1 Vss ± 20 %; R3 = 1 k Ω<br />
Kommutierungs-<br />
Signaux de Commutation Segnale <strong>di</strong><br />
commutation signal commutazione signal<br />
2 annähernd 2 signaux sinusförmige sinusoïdaux Signale C C (Sinus) und D et als D Sinus und 2 sinusoidal 2 segnali signals sinusoidali C and D C as (seno) sine and e D (coseno) cosine with one<br />
Cosinus (Cosinus) mit einer avec Signalperiode une période pro par Umdrehung tour<br />
con signal un periodo del per segnale revolution per giro<br />
Longueur Kabellänge cable Lunghezza Cable length cavo 50 m max. (avec contrôle 50 m du max. niveau (with de sense) tension/con sense wire)<br />
Veuillez Bitte beachten aussi observer Sie auch les <strong>di</strong>e in<strong>di</strong>cations weiterführenden techniques technischen dans le catalogue Hinweise aus des den produits Produktkatalogen<br />
la société Heidenhain. der Fa. Heidenhain de GmbH.<br />
Si Please raccomanda note also <strong>di</strong> the osservare ad<strong>di</strong>tional anche technical le in<strong>di</strong>cazioni advice tecniche given in più the approfon<strong>di</strong>te product catalogues contenute<br />
from nei Heidenhain. cataloghi dei prodotti della <strong>di</strong>tta Heidenhain.<br />
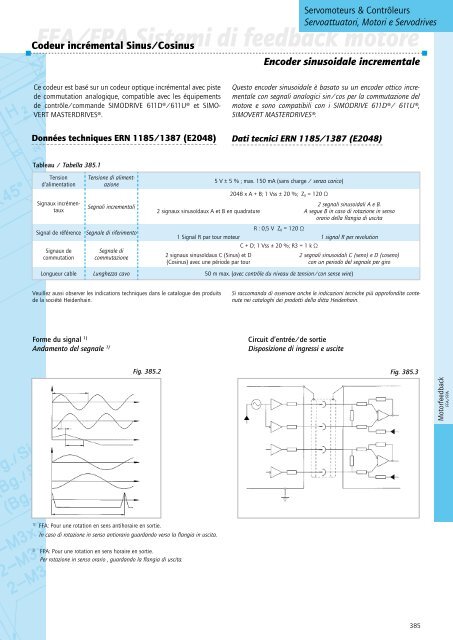
Forme Signalverlauf du signal 1) 1)<br />
Signal Andamento Wave del Form segnale 1) 1)<br />
Circuit Ausgangs-/Eingangsbeschaltung<br />
d’entrée/de sortie<br />
Disposizione Output/Input <strong>di</strong> Circuit ingressi e uscite<br />
#%20Abb. / #%20Fig. 385.2 #%20Abb. / #%20Fig. 385.3<br />
<strong>Motor</strong><strong>feedback</strong><br />
<strong>FFA</strong>/<strong>FPA</strong><br />
1) <strong>FFA</strong>: Pour Bei Drehrichtung une rotation gegen en sens den antihoraire Uhrzeigersinn en sortie. und Blick auf den Abtriebsflansch.<br />
In For caso rotation <strong>di</strong> rotazione in counter-clockwise in senso antiorario <strong>di</strong>rection, guardando looking at verso the la output flangia flange. in uscita.<br />
2) <strong>FPA</strong>: Pour Bei Drehrichtung une rotation im en Uhrzeigersinn sens horaire en und sortie. Blick auf den Abtriebsflansch.<br />
For Per rotazione rotation in in clockwise senso orario <strong>di</strong>rection, , guardando looking la at flangia the output <strong>di</strong> uscita. flange.<br />
385
Codeurs <strong>Motor</strong><strong>feedback</strong> <strong>FFA</strong>/<strong>FPA</strong>Systeme <strong>FFA</strong>/<strong>FPA</strong><br />
Codeur Multiturn multitours Absolut Encoder absolu et und Résolveur Resolver<br />
Multiturn Encoder Absolute assoluto Encoder multigiro and e Resolver resolver<br />
Le Zur codeur absoluten de la Positionserfassung série EQN1325 de wird la société das Mess-System Heidenhain EQN1325 est utilisé<br />
der pour Fa. Heidenhain la lecture de eingesetzt. la position Dieses absolue Mess-System de moteur. Ce basiert système auf<br />
de einem mesure optischen, est basé inkrementellen sur un codeur Drehgeber optique incrémental mit zusätzlichen auquel<br />
ont Code-Scheiben été ajouté des zur roues absoluten codeuses Positionserkennung pour compter jusqu‘à innerhalb 4096<br />
tours 4096 moteur. <strong>Motor</strong>wellenumdrehungen. La position absolue Beim est Einschalten transmise à des l’unité Systems de<br />
contrôle wird <strong>di</strong>e absolute à travers l’interface Position über RS-485. eine RS-485-Schnittstelle L’actionneur est compatible an den<br />
avec Servoregler d’autres übertragen. contrôleurs Neben tels que der SIMODRIVE Anschlussfähigkeit 611D®/611U® an <strong>di</strong>e et<br />
SIMOVERT Servoregler MASTERDRIVES®.<br />
von der Harmonic Drive AG besteht Kompabilität zu<br />
SIMODRIVE 611D®/611U® und SIMOVERT MASTERDRIVES®.<br />
L‘encoder The EQN1325-series assoluto multigiro encoder from Heidenhaim Heidenhain EQN1325 is used fornisce absolute<br />
deco<strong>di</strong>ng assoluta of the su motor 4096 position. giri dell‘albero This measurement <strong>motore</strong>. La posizione system is<br />
la<br />
posizione<br />
viene based trasmessa on an optical, attraverso incremental l‘interfaccia encoder RS485. with L‘encoder ad<strong>di</strong>tional è compatibile<br />
wheels for oltre absolute che con position il convertitore detection <strong>di</strong> frequenza within 4096 Harmonic motor Drive shaft<br />
code<br />
anche revolutions. con altri The absolute convertitori position quali is SIMODRIVE transferred 611D®/611U® to the servo controller<br />
via an MASTERDRIVES®.<br />
RS485 interface. The actuator is compatible to other<br />
e<br />
SIMOVERT<br />
controllers, such as SIMODRIVE 611D®/ 611U® and SIMOVERT<br />
MASTERDRIVES®.<br />
Données Technische techniques Daten EQN EQN1325 (M2048)<br />
Dati Technical tecnici Data EQN1325 1325 (M2048) (M2048)<br />
#%20Tableau #%20Tabelle / Table Tabella 386.1 386.1<br />
Spannungsversorgung Alimentation Tensione Power <strong>di</strong> alimentazione Supply 5 V ± 5 % ; max. 250 mA<br />
2048 x A + B; 1 V ss ± 20 %; Z 0 = 120 Ω<br />
Signaux Inkrementalsignale incrémentaux<br />
Segnali Incremental incrementali Signals<br />
2 annähernd sinusförmige Signale. 2 sinusoidal segnali sinusoidali signals A A and e B. B.<br />
2 signaux sinusoïdaux A et B en quadrature<br />
A nacheilend zu B bei rechtsdrehendem<br />
A segue lags B B with in caso clockwise <strong>di</strong> rotazione rotation in of senso the<br />
Abtriebsflansch<br />
orario della output flangia flange <strong>di</strong> uscita<br />
Absolute<br />
Absolute<br />
8192 (13bit)<br />
Résolution sur un tour<br />
Numero risoluzioni<br />
Positionswerte<br />
position values<br />
En Dat 2.1<br />
Anzahl Nombre von Umdrehungen de tours<br />
No. of<br />
Numero dei giri<br />
revolutions<br />
max. 4096 (Arbre (<strong>Motor</strong>welle moteur/ / albero motor <strong>motore</strong>) shaft)<br />
Longueur Kabellänge cable Lunghezza Cable Length cavo 50 m max. (avec contrôle 50 m du max. niveau (with de sense) tension/con sense wire)<br />
Resolver<br />
Resolver<br />
Données<br />
Technische<br />
techniques<br />
Daten<br />
Technical Data<br />
Dati tecnici<br />
#%20Tableau #%20Tabelle / Table Tabella 386.2 386.2<br />
Nombre Anzahl de Polpaare paires de pôles Numero No. of <strong>di</strong> pole coppie pairs polari 1<br />
Transformation Übersetzung Transmissione Transformation ratio 0,5 ±10 %<br />
Alimentation Spannungsversorgung en courant Tensione Power <strong>di</strong> supply alimentaz voltage 7 Vrms<br />
Consommation Stromaufnahme de courant Assorb. Current <strong>di</strong> corrente <strong>di</strong>ssipation 50 mA<br />
Fréquence Eingangsfrequenz d‘entrée Freq. Input <strong>di</strong> ingresso frequency 10 kHz<br />
Précision Genauigkeit Precisione Accuracy ±10 arcmin<br />
Impédance Impedanz<br />
Impedenza Impedance<br />
Zro [Ω] = 83 + j182 ± 15 %<br />
Zso [Ω] = 142 + j280 ± 15 %<br />
Zss [Ω] = 126 + j233 ± 15 %<br />
Résistance DC-Widerstand<br />
Resistenza DC-Resistance<br />
Rotor 27 Ω ± 10 %<br />
Stator 70 Ω ± 10 %<br />
Classe Isolationsklasse d‘isolation Classe Insulation <strong>di</strong> isolamento class F<br />
Mo<strong>di</strong>fications Änderungen der paramètres Kennwerte possible sind in Abhängigkeit en fonction du des produit eingesetzten utilisé. Fabrikates<br />
möglich.<br />
Sono Alterations possibili of above variazioni technical relative data ai may parametri occur in<strong>di</strong>cati depen<strong>di</strong>ng a seconda the used dei prodotti resolver<br />
impiegati. type.<br />
386
Servomoteurs Servoantriebe, &-<strong>motore</strong>n Contrôleurs & -regler<br />
Servoattuatori, Actuators, <strong>Motor</strong>i <strong>Motor</strong>s e Servodrives & Controllers<br />
<strong>FFA</strong>/<strong>FPA</strong> <strong>Sistemi</strong> <strong>Motor</strong> <strong>di</strong> <strong>Feedback</strong> <strong>feedback</strong> Systems <strong>motore</strong><br />
Câblage Elektrische Anschlüsse<br />
Electrical Connessioni Connections elettriche<br />
#%20Abb. / #%20Fig. 387.1<br />
<strong>Motor</strong><strong>feedback</strong><br />
<strong>FFA</strong>/<strong>FPA</strong><br />
387













