

Comportement routier d'une automobile - s.o.s.Ryko
Comportement routier d'une automobile - s.o.s.Ryko
Comportement routier d'une automobile - s.o.s.Ryko

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
DM16 • <strong>Comportement</strong> Routier d’une Automobile<br />
Origine de l’épreuve : Concours EIA 1999 [ATS et TSI]<br />
I Modèle simplifié de la suspension<br />
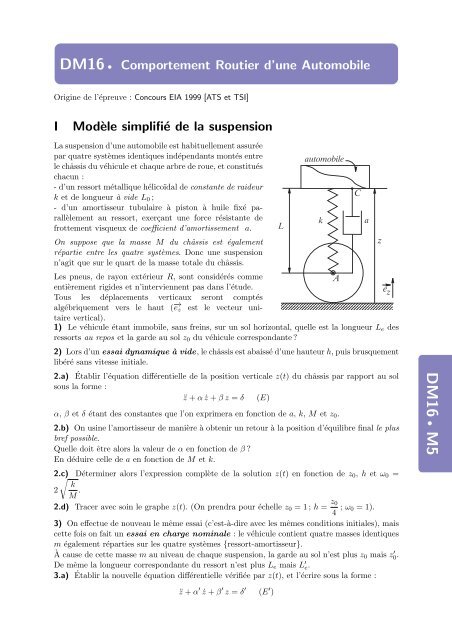
Lasuspensiond’une<strong>automobile</strong>esthabituellementassurée<br />
par quatre systèmes identiques indépendants montés entre<br />
lechâssisduvéhiculeetchaquearbrederoue,etconstitués<br />
chacun :<br />
- d’un ressort métallique hélicoïdal de constante de raideur<br />
k et de longueur à vide L 0 ;<br />
- d’un amortisseur tubulaire à piston à huile fixé parallèlement<br />
au ressort, exerçant une force résistante de<br />
frottement visqueux de coefficient d’amortissement a.<br />
On suppose que la masse M du châssis est également<br />
répartie entre les quatre systèmes. Donc une suspension<br />
n’agit que sur le quart de la masse totale du châssis.<br />
Les pneus, de rayon extérieur R, sont considérés comme<br />
entièrement rigides et n’interviennent pas dans l’étude.<br />
Tous les déplacements verticaux seront comptés<br />
algébriquement vers le haut ( −→ e z est le vecteur unitaire<br />
vertical).<br />
L<br />
<strong>automobile</strong><br />
k<br />
A<br />
C<br />
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx<br />
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx<br />
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx<br />
1) Le véhicule étant immobile, sans freins, sur un sol horizontal, quelle est la longueur L e des<br />
ressorts au repos et la garde au sol z 0 du véhicule correspondante?<br />
2) Lorsd’unessai dynamique à vide,lechâssisestabaisséd’unehauteurh,puisbrusquement<br />
libéré sans vitesse initiale.<br />
2.a) Établir l’équation différentielle de la position verticale z(t) du châssis par rapport au sol<br />
sous la forme :<br />
¨z +αż +βz = δ (E)<br />
α, β et δ étant des constantes que l’on exprimera en fonction de a, k, M et z 0 .<br />
2.b) On usine l’amortisseur de manière à obtenir un retour à la position d’équilibre final le plus<br />
bref possible.<br />
Quelle doit être alors la valeur de α en fonction de β?<br />
En déduire celle de a en fonction de M et k.<br />
2.c) Déterminer alors l’expression complète de la solution z(t) en fonction de z 0 , h et ω 0 =<br />
a<br />
z<br />
e z<br />
DM16 • M5<br />
2√<br />
k<br />
M .<br />
2.d) Tracer avec soin le graphe z(t). (On prendra pour échelle z 0 = 1; h = z 0<br />
4 ; ω 0 = 1).<br />
3) On effectue de nouveau le même essai (c’est-à-dire avec les mêmes conditions initiales), mais<br />
cette fois on fait un essai en charge nominale : le véhicule contient quatre masses identiques<br />
m également réparties sur les quatre systèmes {ressort-amortisseur}.<br />
À cause de cette masse m au niveau de chaque suspension, la garde au sol n’est plus z 0 mais z 0 ′.<br />
De même la longueur correspondante du ressort n’est plus L e mais L ′ e.<br />
3.a) Établir la nouvelle équation différentielle vérifiée par z(t), et l’écrire sous la forme :<br />
¨z +α ′ ż +β ′ z = δ ′ (E ′ )
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong> 2012-2013<br />
en exprimant les nouvelles constantes α ′ , β ′ et δ ′ en fonction de a, k, M, m et z ′ 0 .<br />
3.b) Montrer que, dans ces conditions, le véhicule oscille.<br />
3.c) Déterminer l’expression de la (pseudo-)période T des oscillations autour de la position<br />
d’équilibre final en fonction de k, M et m.<br />
3.d) On souhaite obtenir T = π s pour M = 1000 kg et m = 100 kg. En déduire la valeur de<br />
3<br />
k puis de a.<br />
Indications et réponses partielles<br />
1) L e = L 0 − Mg<br />
4k .<br />
2.a) α a = β k = δ<br />
3.a) α′<br />
a = β′<br />
k = δ′<br />
kz ′ 0<br />
= 4 kz 0 M . – 2.b) a = √ kM. – 2.c) z(t) = z 0 −h(1+ω 0 t)exp(−ω 0 t).<br />
4<br />
=<br />
M +4m . – 3.c) T = π M +4m<br />
√ . – 3.d) k = 44100 N.m −1 .<br />
2 km<br />
II Étude de la réponse harmonique<br />
1) On étudie maintenant le comportement sur une route difficile du véhicule avec ses quatre<br />
passagers de masse m chacun (soit une masse m et le quart de la masse M du châssis pour<br />
chaque suspension).<br />
z ′ 0 = s 0 note toujours la garde au sol du châssis chargé par 4m sur un sol horizontal.<br />
DM16 • M5<br />
1.a) On modélise la route rectiligne dans la direction<br />
x par un sol ondulé sinusoïdalement autour de<br />
la côte de référence horizontale 0 suivant la relation<br />
:<br />
e(x) = e m cos(γx)<br />
Quelle est la distance λ entre deux bosses exprimée<br />
en fonction de γ?<br />
Quelle est la pulsation ω des oscillations verticales<br />
imposées aux roues si le véhicule roule sur cette<br />
route à une vitesse constante V ?<br />
1.b) On repère maintenant le châssis par sa position<br />
s(t) par rapport à la côte de référence 0 liée au<br />
référentiel terrestre supposé galiléen.<br />
Exprimer, selon −→ e z , la force de frottement due à l’amortisseur en fonction de a, ṡ et ė.<br />
Montrer que l’équation différentielle vérifiée par s(t) du châssis est de la forme :<br />
L<br />
0<br />
k<br />
e<br />
a<br />
s<br />
e z<br />
x<br />
¨s+α ′ ṡ+β ′ s = f +δ ′<br />
(⋆)<br />
où f est une fonction du temps que l’on exprimera en fonction de e et de ė.<br />
2) On étudie le régime forcé permanent.<br />
2.a) Quelle est la signification de cette expression?<br />
2.b) On utilise les notations complexes : e = e m e jωt et s = Se jωt , s étant la solution de<br />
l’équation :<br />
¨s+α ′ ṡ+β ′ s = f.<br />
Expliquer pourquoi on ne tient pas compte du terme δ ′ dans (⋆) pour étudier les oscillations du<br />
châssis autour de sa position d’équilibre s 0 .<br />
Exprimer l’amplitude complexe S des oscillations du châssis en fonction de e m , ω, α ′ et β ′ .<br />
Puis, l’écrire sous la forme :<br />
2 http://atelierprepa.over-blog.com/ Qadri J.-Ph. | PTSI
2012-2013<br />
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong><br />
S = e m<br />
1+j Ω Q<br />
1−Ω 2 +j Ω Q<br />
où Ω ≡ ω ω 0<br />
′ est la pulsation réduite, ω 0 ′ et Q étant les constantes que l’on exprimera en fonction<br />
de α ′ et β ′ , puis de a, k, M et m.<br />
2.c) En déduire l’amplitude S des oscillations en fonction de Ω et Q. Que vaut-elle si Ω = 1?<br />
2.d) MontrerqueS atteintunmaximumS m pourunepulsationréduiteΩ m quel’ondéterminera<br />
√<br />
en fonction de Q, et démontrer que S m 1<br />
=<br />
e m 1−Ω 4 .<br />
m<br />
2.e) Calculer Q, Ω m et S m<br />
e m<br />
.<br />
2.f) Tracer avec soin le graphe (ou l’allure du graphe si la question précédente n’a pas été faite)<br />
donnant S<br />
e m<br />
en fonction de Ω dans la plage 0 ≤ Ω ≤ 10.<br />
2.g) Calculer la pulsation propre ω ′ 0 . En déduire la distance λ m entre les ondulations du sol provoquant<br />
la résonance des oscillations du châssis si le véhicule roule à une vitesse V de 90 km.h −1 .<br />
Comment réagit le châssis sur des déformations plus rapprochées passées à la même vitesse?<br />
Indications et réponses partielles<br />
1.a) λ = 2π γ ; ω = γV – 1.b) f(t) = α′ ė(t)+β ′ e(t)<br />
2.b) ω 0 ′ = √ √ √<br />
4k M +4m<br />
β ′ =<br />
M +4m ; Q = 4M<br />
( ) √<br />
S<br />
2 √<br />
2.d) Poser u ≡ Ω 2 et dériver par rapport à u ...→ Ω m = Q 1+ 2 e m Q 2 −1<br />
III Analogie électrique<br />
1) Le comportement du véhicule peut être simulé par un circuit électrique. On se propose, ici,<br />
d’étudier celui qui représente au mieux la réponse harmonique du véhicule sur route dégradée<br />
du II.<br />
1.a) Rappeler les équations différentielles reliant<br />
le courant u(t) et l’intensité i(t) dans<br />
chacun des trois dipôles ci-dessous.<br />
i(t)<br />
R<br />
i(t)<br />
L<br />
i(t)<br />
u(t) u(t) u(t)<br />
C<br />
DM16 • M5<br />
1.b) En déduire les relations entre leurs amplitudes complexes U et I en régime sinusoïdal de<br />
pulsation ω imposée.<br />
2) Le circuit ci-contre est alimenté par<br />
un générateur de tension parfait délivrant<br />
une tension sinusoïdale u e de pulsation ω.<br />
U e<br />
I 1<br />
R<br />
I<br />
U s<br />
2.a) Déterminer l’impédance équivalente<br />
Z de ce circuit.<br />
I 2<br />
L<br />
C<br />
xxxxxxxx<br />
xxxxxxxx<br />
xxxxxxxx<br />
xxxxxxxx<br />
xxxxxxxx<br />
xxxxxxxx<br />
Qadri J.-Ph. | PTSI http://atelierprepa.over-blog.com/ 3
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong> 2012-2013<br />
2.b) Quellesgrandeursd’entréeG e etdesortieG s doiventêtrechoisiespourobtenirunefonction<br />
de transfert harmonique équivalente à la question II.2.b), c’est-à-dire telles que :<br />
G s<br />
G e<br />
=<br />
1+j Ω Q<br />
1−Ω 2 +j Ω Q<br />
où Ω ≡ ω ω 0<br />
est la pulsation réduite, ω 0 une pulsation propre et Q<br />
un rapport caractéristique dont on déterminera les expressions<br />
en fonction de R, L et C.<br />
3) Pour préciser l’analogie électrique au modèle mécanique, il faut établir l’équivalence des<br />
paramètres mécanique m+ M , k, a et électriques R, L, C.<br />
4<br />
3.a) Quelle est la puissance moyenne dissipée dans la résistance R en fonction de l’amplitude<br />
U e , de R, L, C et ω?<br />
3.b) On note V e l’amplitude de la vitesse ė verticale de la roue dans III.2) due à la déformation<br />
sinusoïdale de la route, et V s celle de la vitesse ṡ du châssis. On donne également l’expression de<br />
la puissance moyenne dissipée par frottement dans l’amortisseur en fonction de a, k, M et m :<br />
< P f >= 1 2 aV 2<br />
e<br />
ω 4<br />
(β ′ −ω 2 ) 2 +α ′2 ω 2<br />
En comparant les expressions des deux puissances moyennes, ainsi que celles des deux fonctions<br />
de transfert II.2.b) et III.2.b), trouver les équivalents électriques de a, k, m+ M 4 et V s.<br />
Indications et réponses partielles<br />
2.a) Z = R−RCLω2 +jLω<br />
jCω(R+jLω)<br />
avec ω 0 = √ 1 ; Q = R .<br />
LC Lω 0<br />
3.a) < P J >= 1 2 RI2 1 = 1 2<br />
– 2.b) Diviseur de tension entre U s et U e . → d’où le résultat,<br />
U 2 R<br />
R = ... = 1<br />
2R<br />
L 2 C 2 ω 4<br />
(1−LCω 2 ) 2 + L2 ω 2<br />
R 2 U 2 e.<br />
DM16 • M5<br />
Solution<br />
I Modèle simplifié de la suspension<br />
1) À l’équilibre, la tension du ressort d’une des quatre suspensions compense le quart du poids<br />
du châssis (le châssis n’est soumis a aucun frottement visqueux puisque la vitesse relative d’un<br />
amortisseur est nulle à l’équilibre) :<br />
−→ 0 =<br />
−→ T +<br />
−→ P<br />
4<br />
⇒ selon −→ e z : 0 = −k(L e −L 0 )− Mg<br />
4<br />
(1)<br />
Soit : L e = L 0 − Mg et z 0 = L e +R = L 0 − Mg<br />
4k<br />
4k +R .<br />
2.a) En appliquant le principe fondamental de la dynamique au quart du châssis associé à une<br />
suspension :<br />
M<br />
4<br />
−−−−−−→<br />
a chassis/R = −→ T +<br />
−→ P<br />
4 +−→ F frot<br />
avec −−−−−−→ a chassis/R = ¨z −→ e z (mouvement vertical), −→ T = −k(L−L 0 ) −→ e z et −→ F frot = −a(ż C −ż A ) −→ e z =<br />
−aż C<br />
−→ ez = −aż −→ e z . Soit, en projection selon −→ e z :<br />
M<br />
4 ¨z = −k(L−L 0)− Mg −aż (2)<br />
4<br />
4 http://atelierprepa.over-blog.com/ Qadri J.-Ph. | PTSI
2012-2013<br />
Soit, en faisant (2)−(1) :<br />
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong><br />
M<br />
4 ¨z = −k(L−L e)−aż = −k(z −z 0 )−aż; d’où :<br />
¨z +αż +βz = δ (E) avec α = 4a<br />
M<br />
β = 4k<br />
M<br />
δ = 4k<br />
M z 0<br />
2.b) Pour que le retour à la position d’équilibre soit le plus rapide possible, il faut qu’il corresponde<br />
à un régime libre critique.<br />
Le régime critique est obtenu lorsque le discriminant de l’équation caractéristique associé à<br />
l’équation différentielle (E) est nul :<br />
δ = α 2 −4β = 0 ⇐⇒ α = 2 √ β ⇐⇒ 16a2<br />
M 2 = 4 4k<br />
M ⇐⇒ a = √ kM<br />
2.c) La solution z(t) de (E) se décompose en une solution particulière de l’équation avec second<br />
membre (z P ) et de la solution générale de l’équation homogène (z G (t)).<br />
• z P = z 0 .<br />
• L’équation caractéristique de (E) (r 2 +αr+β = 0) admet, pour le régime critique, une racine<br />
double :<br />
Alors, z G (t) = (A+Bt)e −ω 0t<br />
r = − α 2 = −2a M = −2 √<br />
k<br />
M ≡ −ω 0<br />
• Ainsi : z(t) = z G (t)+z P = (A+Bt)e −ω 0t +z 0 .<br />
Les constante d’intégration se déduisent des conditions initiales :<br />
◦ z(t = 0) = z 0 −h = A+z 0 ⇒ A = −h;<br />
◦ ż(t = 0) = 0 = −Aω 0 +B ⇒ B = Aω 0 = −hω 0 .<br />
.<br />
z(t) = z 0 −h(1+ω 0 t)e −ω 0t<br />
2.d) z(t) = z 0 −h(1+ω 0 t)e −ω 0t<br />
⇒ ż(t) = hω 2 0 te−ω 0t > 0 ⇒ ¨z(t) = hω 0 (1−ω 0 t)e −ω 0t .<br />
Ainsi, z(t) est une fonction croissante dont la courbe<br />
admet :<br />
◦ une tangente horizontale en t = 0 (car ż(0) = 0),<br />
◦ un point d’inflexion M 1 pour ¨z(t 1 ) = 0, soit<br />
M 1<br />
(<br />
t 1 = 1 ω 0<br />
, z 1 = z 0 − 2h e<br />
)<br />
,<br />
◦ une asymptote horizontale d’équation z = z 0<br />
(retour à l’équilibre).<br />
0.5 1 1.5 2 2.5 3 3.5<br />
t<br />
3.a) La nouvelle équation traduisant l’équilibre du véhicule en charge nominale est :<br />
0 = −k(L ′ e −L 0 )−<br />
1.2<br />
1<br />
0.8<br />
z0.6<br />
0.4<br />
0.2<br />
0<br />
(M +4m)g<br />
4<br />
(en introduisant la nouvelle longueur à l’équilibre L ′ e du ressort correspondant à la nouvelle<br />
garde au sol z 0 ′ du châssis chargé par 4m).<br />
Tandis que l’équation du mouvement du châssis chargé selon −→ e z devient :<br />
(M +4m)<br />
4<br />
¨z = −k(L−L 0 )−<br />
Soit, en faisant (2’)−(1’), avec L−L ′ e = z −z ′ 0 :<br />
(M +4m)g<br />
4<br />
(1’)<br />
−aż (2’)<br />
DM16 • M5<br />
¨z +α ′ ż +β ′ z = δ ′ (E ′ ) avec α ′ =<br />
4a<br />
M +4m β′ =<br />
4k<br />
M +4m δ′ =<br />
4k<br />
M +4m z′ 0<br />
Qadri J.-Ph. | PTSI http://atelierprepa.over-blog.com/ 5
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong> 2012-2013<br />
3.b) Le discriminant de l’équation caractéristique associée à (E ′ ) est (en se souvenant que<br />
a = √ kM !) :<br />
∆ ′ = α ′2 −4β ′ =<br />
( ) 4a 2<br />
4k<br />
−4<br />
M +4m M +4m = 16a2 −16k(M +4m)<br />
(M +4m) 2 = − 64km<br />
(M +4m) 2 < 0<br />
Ceci correspond à des racines complexes de l’équation caractéristiques, donc à une solution<br />
pseudo-périodique de (E ′ ), c’est-à-dire à une oscillation sinusoïdale amortie exponentiellement.<br />
3.c) Pour déterminer la pseudo-période, il faut déterminer la pseudo-pulsation qui est la partie<br />
imaginaire commune aux deux racines r 1/2 de l’équation caractéristique :<br />
Soit : ω ≡ 2π<br />
T = 4√ km<br />
M +4m . Donc : T = π 2<br />
√<br />
r 1/2 = − α′ |∆<br />
2 ±j ′ |<br />
= − α′<br />
2 2 ±jω<br />
M +4m<br />
√<br />
km<br />
3.d) On veut T = π 2<br />
M +4m<br />
√<br />
km<br />
= π 3<br />
s, soit :<br />
k = 9 4<br />
(M +4m) 2<br />
m<br />
= 44100 N.m −1 et donc : a = √ kM = 6600 kg.s −1<br />
DM16 • M5<br />
II Étude de la réponse harmonique<br />
Remarquonsquesurleschémaetdansl’énoncé,lacôtez parrapportàl’horizontaleestdésormais<br />
notée s!<br />
1) <strong>Comportement</strong> sur une route difficile du véhicule chargé.<br />
1.a) • la période spatiale (‘distance entre deux bosses’) correspond à γλ = 2π → λ = 2π γ<br />
• Le véhicule roule selon (Ox) à la vitesse V = cte, donc, (avec un choix judicieux de l’origine<br />
des temps), x = Vt et e(x) peut s’écrire explicitement en fonction du temps t :<br />
e(t) = e m cos(γx) = e m cos(γV t) = e m cos(ωt) ⇒ ω = γV = 2π V λ<br />
Ce qui se retrouve en écrivant que la durée de parcours entre deux bosses est T = λ V = 2π ω .<br />
1.b) • La force de frottement exercée par l’amortisseur sur le châssis est proportionnelle à la<br />
différence de vitesse de ses extrémités : −→ F frot = −a(ż C −ż A ) −→ e z = −a(ṡ−ė) −→ e z .<br />
Donc, selon −→ e z : F frot = −a(ṡ−ė)<br />
• L’équation traduisant l’équilibre du véhicule en charge nominale est toujours :<br />
0 = −k(L ′ e −L 0 )−<br />
(M +4m)g<br />
4<br />
(1 ′′ )<br />
Tandis que l’équation du mouvement du châssis chargé selon −→ e z devient :<br />
(M +4m)<br />
4<br />
¨s = −k(L−L 0 )−<br />
(M +4m)g<br />
4<br />
−a(ṡ−ė) (2 ′′ )<br />
6 http://atelierprepa.over-blog.com/ Qadri J.-Ph. | PTSI
2012-2013<br />
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong><br />
Soit, en faisant (2 ′′ )−(1 ′′ ), avec L−L ′ e = s−e−z ′ 0 :<br />
¨s+α ′ ṡ+β ′ s = f +δ ′ (⋆) avec α ′ =<br />
4a<br />
M +4m β′ =<br />
4k<br />
M +4m δ′ =<br />
4k<br />
M +4m z′ 0<br />
et<br />
f = α ′ ė+β ′ e<br />
2) Régime forcé permanent.<br />
2.a) Lerégimeforcépermanentestlerégimedesoscillationssinusoïdalesdepulsationω imposées<br />
au système une fois que le régime transitoire a disparu.<br />
Il correspond à la solution particulière de l’équation différentielle. Il est de forme sinusoïdale et<br />
de pulsation ω.<br />
2.b) • On cherche à résoudre, en notation complexes (e = e m e jωt et s = Se jωt ), l’équation :<br />
¨s+α ′ ṡ+β ′ s = f.<br />
• On ne tient pas compte du terme δ ′ dans (⋆) parce que seules les oscillations du châssis nous<br />
intéresse;orδ ′ n’intervientqueparl’ajoutd’uneconstante(z ′ 0 = s 0)danslasolutionparticulière.<br />
(Négliger δ ′ revient, finalement, à translater le repère à la position d’équilibre s 0 .)<br />
• En complexes, il vient : S(β ′ −ω 2 +jωα ′ ) = e m (β ′ +jωα ′ ), soit :<br />
S = e m<br />
β ′ +jωα ′<br />
β ′ −ω 2 +jωα ′ qui peut s’écrire : S = e m<br />
1+j Ω Q<br />
avec : Ω = ω ω ′ 0<br />
ω ′ 0 = √ β ′ =<br />
2.c) Donc : S = |S| = e m<br />
√ √√√√√√<br />
√<br />
4k<br />
M +4m<br />
1+ Ω2<br />
Q 2<br />
Q = ω′ 0<br />
α ′ =<br />
1−Ω 2 +j Ω Q<br />
√<br />
M +4m<br />
4M<br />
(1−Ω 2 ) 2 + Ω2<br />
Q 2 . Et lorsque Ω = 1, S (Ω=1) = e m<br />
√<br />
1+Q 2 .<br />
2.d) • On pose u = Ω 2 et on dérive g(u) =<br />
( S<br />
e m<br />
) 2<br />
=<br />
1+ u Q 2<br />
dg<br />
du = ... → cette dérivée s’annule pour : 1<br />
2Q 2 u2 +u−1 = 0.<br />
Or, ce polynôme n’a qu’une seule racine positive (u > 0!) qui est :<br />
u m = Q 2 (√<br />
1+ 1<br />
2Q 2 −1 )<br />
(1−u) 2 + u Q 2 par rapport à u :<br />
√ √<br />
=⇒ Ω m = Q 1+ 1<br />
2Q 2 −1<br />
DM16 • M5<br />
Ω m est la pulsation réduite de résonance correspondant à une résonance des oscillations du<br />
châssis roulant sur la route ondulée.<br />
(<br />
Sm<br />
e m<br />
) 2<br />
=<br />
•<br />
1+ u m<br />
Q 2<br />
(1−u m ) 2 + u m<br />
Q 2 , avec, par définition de u m :<br />
Soit : u m<br />
Q 2 = 2−2u m<br />
. Donc :<br />
u m<br />
(<br />
Sm<br />
e m<br />
) 2<br />
=<br />
2−u m<br />
u m<br />
(1−u m ) 2 +2 1−u m<br />
u m<br />
=<br />
2−u m<br />
u m (1−u m ) 2 +2(1−u m ) =<br />
1<br />
2Q 2 u2 m +u m −1 = 0<br />
2−u m<br />
(1−u m )(u m −u 2 m +2)<br />
Qadri J.-Ph. | PTSI http://atelierprepa.over-blog.com/ 7
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong> 2012-2013<br />
Soit :<br />
(<br />
Sm<br />
e m<br />
) 2<br />
=<br />
2−u m<br />
(1−u m )(2−u m )(1+u m ) = 1<br />
1−u 2 m<br />
⇒<br />
S m<br />
e m<br />
=<br />
√<br />
1<br />
1−Ω 4 m<br />
2.e) AN : Q = 0,59 Ω m = 0,75<br />
S m<br />
e m<br />
= 1,2 .<br />
Rq : Situation où le facteur de qualité est faible, pour avoir une faible acuité à la résonance S m<br />
e m<br />
.<br />
2.f) Cf. graphe ci-contre.<br />
2.g) • Valeur de la pulsation propre du système :<br />
ω ′ 0 =<br />
√ √<br />
4k 44100<br />
M +4m = 2 = 11,2 rad.s−1<br />
1400<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
• Pour être à la résonance, il faut que<br />
ω = ω m = Ω m ω ′ 0 = 0,75ω ′ 0 = 8,4 rad.s −1 0.2<br />
0.4<br />
0 2 4 6 8 10<br />
Omega<br />
Or, λ = VT = V 2π ω , donc, la distance λ m entre les ondulations du sol qui commande la<br />
résonance des oscillations du châssis si le véhicule roule à vitesse V constante est :<br />
λ m = V 2π<br />
ω m<br />
= V<br />
2π<br />
0,75ω ′ 0<br />
= 18,7 m<br />
• Si les déformations sont plus rapprochées, λ < λ m , soit ω > ω m ; on sort donc de la zone de<br />
S<br />
résonance et les oscillations de la route sont alors mieux absorbées par le véhicule : < S m<br />
.<br />
e m e m<br />
III Analogie électrique<br />
1.a) En convention récepteur :<br />
DM16 • M5<br />
u R = Ri R<br />
u L = L di L<br />
dt<br />
i C = dq<br />
dt = C du C<br />
dt<br />
1.b) Aux trois relations précédentes correspondent les relations entre amplitudes complexes (en<br />
posant i = Ie jωt et u = U e jωt ) :<br />
U R = RI R U L = jLωI L U C = 1<br />
jCω I C<br />
2.a) L’impédance du circuit est : Z = Z R //Z L +Z C = jLRω<br />
R+jLω + 1<br />
jCω .<br />
2.b) Diviseur de tension entre U s et U e :<br />
Z = R−RCLω2 +jLω<br />
jCω(R+jLω)<br />
U s<br />
U e<br />
= Z C<br />
Z =<br />
R+jLω<br />
R−RCLω 2 +jLω =<br />
1+j Lω<br />
R<br />
1−CLω 2 +j Lω<br />
R<br />
Soit :<br />
U s<br />
U e<br />
=<br />
1+j Ω Q<br />
1−Ω 2 +j Ω Q<br />
avec : Ω = ω ω 0<br />
ω 0 =<br />
√<br />
1<br />
LC<br />
Q = R<br />
Lω 0<br />
= R√<br />
C<br />
L<br />
8 http://atelierprepa.over-blog.com/ Qadri J.-Ph. | PTSI
2012-2013<br />
<strong>Comportement</strong> <strong>routier</strong> d’une <strong>automobile</strong><br />
3.a) La puissance dissipée par effet Joule est en moyenne :<br />
< P J >= 1 T<br />
∫ T<br />
0<br />
Ri 2 dt = 1 2 RI2 1 = 1 2<br />
U 2 R<br />
R = 1<br />
2R<br />
< P J >= 1<br />
2R<br />
L 2 ω 2<br />
1+ L2 ω 2 I 2 = 1<br />
2R<br />
R 2<br />
L 2 C 2 ω 4<br />
(1−LCω 2 ) 2 + L2 ω 2<br />
R 2 U 2 e<br />
(<br />
L 2 ω 2 C 2 ω 2 1+ L2 ω 2 )<br />
R 2<br />
1+ L2 ω 2<br />
R 2 (1−LCω 2 ) 2 + L2 ω 2 Ue<br />
2<br />
R 2<br />
3.b) La puissance dissipée par frottement visqueux dans l’amortisseur est en moyenne :<br />
< P f >= 1 T<br />
∫ T<br />
0<br />
| −→ F frot (ṡ−ė) −→ e z |dt = 1 T<br />
∫ T<br />
0<br />
a(ṡ−ė) 2 dt = a < (ṡ−ė) 2 >.<br />
Pour calculer (ṡ−ė), il faut prendre la partie réelle de (ṡ−ė), avec, d’après II.2.b) :<br />
s = e<br />
ce qui donne : ṡ−ė = ė<br />
Et donc : Re(ṡ−ė) = ṡ−ė =<br />
β ′ +jωα ′<br />
β ′ +jωα ′<br />
β ′ −ω 2 +jωα ′ et donc : ṡ = ė<br />
β ′ −ω 2 +jωα ′<br />
ω 2<br />
β ′ −ω 2 +jωα ′ = ė ω2 (β ′ −ω 2 −jωα ′ )<br />
(β ′ −ω 2 ) 2 +α ′2 ω 2 .<br />
V e ω 2<br />
(β ′ −ω 2 ) 2 +α ′2 ω 2 ((β′ −ω 2 )cosωt+α ′ ωsinωt).<br />
Alors : < P f >= a < (ṡ−ė) 2 >, ce qui donne :<br />
Ve 2 ω 4<br />
< P f >=<br />
((β ′ −ω 2 ) 2 +α ′2 ω 2 ) 2 ((β′ −ω 2 ) 2 }<br />
< cos<br />
{{ 2 ωt ><br />
}<br />
+α ′2 ω 2 }<br />
< sin<br />
{{ 2 ωt ><br />
}<br />
1 1<br />
2 2<br />
+2(β ′ −ω 2 )α ′ ω< cos(ωt)sin(ωt) > ).<br />
} {{ }<br />
( ) m+M/4 2<br />
ω 4<br />
0<br />
Finalement : < P f >= 1 2 aV 2<br />
e<br />
ω 4<br />
(β ′ −ω 2 ) 2 +α ′2 ω 2 = 1 2 aV e<br />
2<br />
k<br />
(<br />
1− m+M/4 ) 2<br />
ω 2 + a2<br />
k k 2 ω2<br />
3.c) la comparaison des deux expressions des puissances moyennes dissipées par le système<br />
mécaniqueensuspensionetlecircuitélectriquepermetd’identifierleséquivalencesélectromécaniques<br />
suivantes :<br />
a ←→ 1 R<br />
k ←→ 1 L<br />
m+ M 4 ←→ C V s ←→ U s<br />
DM16 • M5<br />
Rq : Pour la dernière analogie, comparer s e avec U s<br />
U e<br />
.<br />
Qadri J.-Ph. | PTSI http://atelierprepa.over-blog.com/ 9














