

M8 – CHANGEMENT DE RÉFÉRENTIELS - s.o.s.Ryko
M8 – CHANGEMENT DE RÉFÉRENTIELS - s.o.s.Ryko
M8 – CHANGEMENT DE RÉFÉRENTIELS - s.o.s.Ryko

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
OBJECTIFS<br />
<strong>M8</strong> <strong>–</strong> <strong>CHANGEMENT</strong><br />
<strong>DE</strong> <strong>RÉFÉRENTIELS</strong><br />
(d<br />
• Par définition, le vecteur vitesse −−−→<br />
−−→ )<br />
OM<br />
v M/R =<br />
dt<br />
R<br />
, O étant un point fixe du référentiel R,<br />
dépend du référentiel dans lequel on l’évalue. De même pour l’accélération −−−→ a M/R =<br />
( d<br />
−−−→ )<br />
v M/R<br />
dt<br />
Dans ce chapitre, on se limite aux aspects cinématiques et on cherche à établir le liens entre les<br />
vitesses et les accélérations exprimées dans deux référentiels différents.<br />
Nouveautés de cette leçon :<br />
• Loi de composition des vitesses.<br />
• Loi de composition des accélérations.<br />
• Notion de point coïncidant pour savoir retrouver la vitesse d’entraînement −→ v e (M) et<br />
l’accélération d’entraînement −→ a e (M)<br />
• Expression générale de l’accélération de Coriolis −→ a C (M).<br />
.<br />
R<br />
I<br />
Mouvement relatif de deux référentiels<br />
I.1 Position du problème<br />
⎧<br />
⎧<br />
⎨ la trajectoire de M dans R a<br />
Q : Si on connaît la vitesse −−−−→<br />
⎨ la traj. de M dans R e<br />
v<br />
⎩<br />
M/Ra (t)<br />
l’accélération −−−−→<br />
, quelle sont la vitesse v −−−→<br />
⎩<br />
M/Re (t)<br />
a M/Ra (t)<br />
l’accélération −−−−→ a M/Re (t)<br />
Pour répondre à cette question, il faut connaître le mouvement de R e par rapport à R a :<br />
?<br />
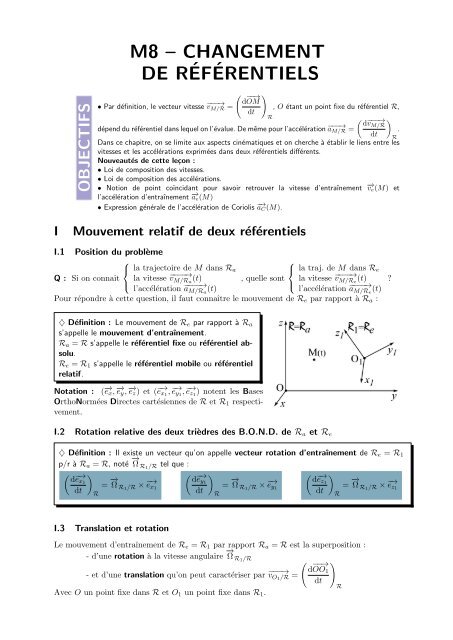
♦ Définition : Le mouvement de R e par rapport à R a<br />
s’appelle le mouvement d’entraînement.<br />
R a = R s’appelle le référentiel fixe ou référentiel absolu.<br />
R e = R 1 s’appelle le référentiel mobile ou référentiel<br />
relatif.<br />
Notation : ( −→ e x , −→ e y , −→ e z ) et ( −→ e x1 , −→ e y1 , −→ e z1 ) notent les Bases<br />
OrthoNormées Directes cartésiennes de R et R 1 respectivement.<br />
I.2 Rotation relative des deux trièdres des B.O.N.D. de R a et R e<br />
♦ Définition : Il existe un vecteur qu’on appelle vecteur rotation d’entraînement de R e = R 1<br />
p/r à R a = R, noté −→ Ω R1 /R tel que :<br />
( d<br />
−→ )<br />
ex1<br />
= −→ Ω<br />
dt<br />
R1 /R × −→<br />
( d<br />
−→ )<br />
ey1<br />
e x1<br />
= −→ Ω<br />
dt<br />
R1 /R × −→<br />
( d<br />
−→ )<br />
ez1<br />
e y1<br />
= −→ Ω<br />
dt<br />
R1 /R × −→ e z1<br />
R<br />
R<br />
R<br />
I.3 Translation et rotation<br />
Le mouvement d’entraînement de R e = R 1 par rapport R a = R est la superposition :<br />
- d’une rotation à la vitesse angulaire −→ Ω R1 /R<br />
(d<br />
- et d’une translation qu’on peut caractériser par −−−→<br />
−−→ )<br />
OO 1<br />
v O1 /R =<br />
dt<br />
R<br />
Avec O un point fixe dans R et O 1 un point fixe dans R 1 .
<strong>M8</strong> I. Mouvement relatif de deux référentiels 2009-2010<br />
I.4 Mouvement d’entraînement par translation<br />
a Translation d’un solide dans R :<br />
♦ Définition : Un solide est en mouvement de translation<br />
par rapport à un référentiel R si, pour deux points<br />
−→<br />
A et B quelconques de ce solide, le vecteur AB garde<br />
toujours les mêmes direction, sens et norme au cours du<br />
−→<br />
temps : AB = −→ Cte .<br />
❚ Propriétés : Les trajectoires de tous les points d’un<br />
solide en translation sont superposables.<br />
Si ces trajectoires sont :<br />
• des courbes de forme quelconque : on parle de translation curviligne<br />
• des droites parallèles : on parle de translation rectiligne<br />
• des cercles de même rayon : on parle de translation circulaire.<br />
❚ Propriété :<br />
−→ AB =<br />
−−→<br />
Cste ⇔ −→ OB(t) −<br />
−→ OA(t) =<br />
−→ Cte ⇔<br />
−−−→<br />
v B/R (t) = v −−→<br />
A/R (t)<br />
Cl : au cours d’une translation, tous les points d’un solide ont, à chaque instant t, le même<br />
vecteur vitesse −→ v (t).<br />
Rq : Bien entendu, ce vecteur vitesse peut varier au cours du temps, en norme comme en<br />
direction !<br />
b R 1 est un solide géométrique qui peut être en translation p/r à R :<br />
Dans ce cas, tout vecteur lié à R e = R 1 demeure<br />
constant dans R a = R 1 ; entre autre : −→ e x1 , −→ e y1 et −→ e z1 .<br />
Donc :<br />
⎧ ( d<br />
−→ )<br />
ex1<br />
= −→ Ω<br />
dt<br />
R1 /R × −→ e x1 = −→ 0<br />
⎪⎨ ( R<br />
d<br />
−→ )<br />
ey1<br />
= −→ Ω<br />
dt<br />
R1 /R × −→ e y1 = −→ 0 ⇔ −→ Ω R1 /R = −→ 0<br />
( R<br />
d<br />
−→ )<br />
ez1<br />
⎪⎩ = −→ Ω<br />
dt<br />
R1 /R × −→ e z1 = −→ 0<br />
R<br />
❚ Cl : Lorsqu’un référentiel R 1 a un mouvement d’entraînement de translation par rapport à<br />
un référentiel R, alors, son vecteur rotation d’entraînement en nul.<br />
I.5 Mouvement d’entraînement par rotation de<br />
R e par rapport à R a<br />
Hyp : Supposons que, ∀ t :<br />
• (Oz) = (O 1 z 1 ) et O = O 1 .<br />
• le référentiel R 1 est en rotation dans le référentiel R<br />
autour de la verticale.<br />
⎧ −→<br />
⎨ e x1 = cos θ −→ e x + sin θ −→ e y<br />
Alors :<br />
−→<br />
e y1 = − sin θ −→ e x + cos θ −→ e y<br />
⎩ −→<br />
e z1 = −→ e z<br />
Soit, en dérivant par rapport au temps dans le référentiel R :<br />
2 http ://atelierprepa.over-blog.com/ Qadri J.-Ph. ∣ PTSI
△<br />
2009-2010 II. Dérivation d’un vecteur par rapport au temps <strong>M8</strong><br />
⎧ ( d<br />
−→ )<br />
ex1<br />
=<br />
dt<br />
˙θ(− sin θ −→ e x + cos θ −→ e y ) = ˙θ<br />
−→<br />
e y1<br />
⎪⎨ ( R<br />
d<br />
−→ )<br />
ey1<br />
=<br />
dt<br />
˙θ(− cos θ −→ e x − sin θ −→ e y ) = − ˙θ<br />
−→<br />
e x1<br />
( R<br />
d<br />
−→ )<br />
ez1<br />
⎪⎩ = −→ 0<br />
dt<br />
R<br />
On peut facilement vérifier que :<br />
Donc, en posant −→ Ω = ˙θ −→ e z , pour i = x, y ou z :<br />
(<br />
⎧<br />
˙θ −→ e z1 × −→<br />
(<br />
e x1 = ˙θ<br />
−→ d<br />
−→ )<br />
d<br />
−→ )<br />
ei1<br />
ex1<br />
= −→ Ω × −→ e<br />
e y1 ≡<br />
i1<br />
dt<br />
dt<br />
⎪⎨<br />
R<br />
˙θ −→ e z1 × −→<br />
(<br />
e y1 = − ˙θ<br />
−→ d<br />
−→ )<br />
ey1<br />
Alors (cf. I.2) −→ Ω représente le vecteur rotation<br />
e x1 ≡<br />
dt<br />
de R<br />
R<br />
⎪⎩ ˙θ −→ e z1 × −→ e z1 = −→ ( d<br />
−→ )<br />
1 par rapport à R :<br />
ez1<br />
0 =<br />
−→<br />
dt<br />
R<br />
Ω R1 /R = −→ Ω = ˙θ −→ e z<br />
Rq : (Important à comprendre !)<br />
La base ( −→ e x1 , −→ e y1 , −→ e z1 ) est une base cartésienne dans le référentiel R 1<br />
Mais ces trois même vecteurs sont les vecteurs d’une base polaire dans le référentiel R.<br />
Cl : La nature d’une base (cartésienne ou polaire) dépend du référentiel dans lequel on<br />
travaille.<br />
II<br />
II.1<br />
Dérivation d’un vecteur par rapport au temps<br />
Formule de Varignon<br />
• Soit un vecteur quelconque −→ U . On peut le projeter dans la B.O.N.D. de R 1 = R e :<br />
−→ U = Ux1<br />
−→ ex1 + U<br />
−→<br />
z1ez1 + U<br />
−→<br />
z1ez1<br />
• On peut dériver ce vecteur par rapport au temps dans le référentiel R a = R : l’observateur,<br />
pour cette opération, est LIÉ à R :<br />
(<br />
d −→ )<br />
U<br />
dt<br />
R<br />
= U ˙ −→<br />
x1ex1 + U˙<br />
−→<br />
y1 ey1 + U˙<br />
−→<br />
( d<br />
−→ )<br />
ex1<br />
z1 ez1 +U x1<br />
} {{ } dt<br />
(<br />
d −→ ) (<br />
U d −→ )<br />
U<br />
= + −→ Ω<br />
−→<br />
dt dt<br />
R1 /R×(U x1ex1 +U<br />
−→<br />
z1ez1 +U<br />
−→<br />
z1ez1 ) ⇔<br />
R<br />
R 1<br />
R<br />
( d<br />
−→ )<br />
ey1<br />
+ U y1<br />
dt<br />
R<br />
( d<br />
−→ )<br />
ez1<br />
+ U z1<br />
dt<br />
(<br />
d −→ ) (<br />
U d −→ )<br />
U<br />
= + −→ Ω<br />
dt dt<br />
R1 /R × −→ U<br />
R<br />
R 1<br />
R<br />
II.2<br />
Composition des vecteurs rotation<br />
a Relation entre −→ Ω R1 /R et −→ (<br />
Ω R/R1<br />
d −→ ) (<br />
U<br />
d −→ )<br />
U<br />
=<br />
+ −→ Ω<br />
dt<br />
dt<br />
R1 /R × −→ U<br />
( R<br />
R 1<br />
d −→ ) (<br />
U<br />
d −→ )<br />
U<br />
+ −→ Ω<br />
dt<br />
dt<br />
R/R1 × −→ U<br />
R 1<br />
=<br />
R<br />
⎫<br />
⎪⎬<br />
⇒<br />
b Composition des vecteurs rotations :<br />
( Supposons trois référentiels R 1 , R 2 et R 3 . On a :<br />
d −→ ) (<br />
U<br />
d −→ )<br />
⎫<br />
U<br />
dt<br />
dt<br />
⎪⎬<br />
(<br />
d −→ U<br />
dt<br />
)<br />
R 2<br />
=<br />
R 3<br />
=<br />
(<br />
d −→ U<br />
dt<br />
+ −→ Ω R1 /R 2<br />
× −→ U<br />
) R 1<br />
R 2<br />
+ −→ Ω R2 /R 3<br />
× −→ U<br />
⎪⎭<br />
⎪⎭<br />
⇒<br />
(<br />
d −→ ) (<br />
U d −→ )<br />
U<br />
=<br />
dt dt<br />
R<br />
R<br />
D’où :<br />
(<br />
d −→ ) (<br />
U d −→ )<br />
U<br />
=<br />
dt dt<br />
R 3<br />
+ ( −→ Ω R/R1 + −→ Ω R1 /R) × −→ U<br />
} {{ }<br />
−→ 0<br />
−→ Ω R1 /R = − −→ Ω R/R1<br />
+( −→ Ω R1 /R 2<br />
+ −→ Ω R2 /R 3<br />
) × −→ U<br />
} {{ }<br />
R 1<br />
−→ Ω R1 /R 3<br />
Qadri J.-Ph. ∣ PTSI http ://atelierprepa.over-blog.com/ 3
<strong>M8</strong> II. Dérivation d’un vecteur par rapport au temps 2009-2010<br />
D’où :<br />
−→ Ω R1 /R 3<br />
= −→ Ω R1 /R 2<br />
+ −→ Ω R2 /R 3<br />
c<br />
Application : coordonnées sphériques<br />
Le repère (O, −→ e x , −→ e y , −→ e z ) est le « solide géométrique »LIÉ au<br />
référentiel R.<br />
Le repère (O, −→ e , −→ e φ , −→ e z ) est le « solide géométrique »LIÉ au<br />
référentiel R ′ tel que : −→ Ω R ′ /R = ˙φ −→ e z .<br />
Le repère (O, −→ e r , −→ e θ , −→ e φ ) est le « solide géométrique »LIÉ au<br />
référentiel R 1 tel que : −→ Ω R1 /R ′ = ˙θ −→ e φ .<br />
• D’après la composition des vecteurs rotation :<br />
−→ Ω R1 /R = −→ Ω R1 /R ′ + −→ Ω R ′ /R = ˙θ −→ e φ + ˙φ −→ e z<br />
• d’où :<br />
( d<br />
−→ er<br />
dt<br />
)<br />
R<br />
=<br />
−→ 0<br />
{( }} {<br />
d<br />
−→ )<br />
er<br />
+ −→ Ω<br />
dt<br />
R1 /R × −→ e r<br />
R 1<br />
→<br />
• d’où :<br />
→<br />
( d<br />
−→ er<br />
dt<br />
)<br />
R<br />
( d<br />
−→ eθ<br />
dt<br />
= ( ˙θ −→ e φ + ˙φ −→ e z ) × −→ e r = ˙θ −→ e θ + ˙φ −→ e z × −→ e r<br />
} {{ }<br />
sin θ −→ e φ<br />
)<br />
= ˙θ −→ e θ + ˙φ sin θ −→ e φ 1<br />
R<br />
−→ 0<br />
{( }} {<br />
d<br />
−→ )<br />
eθ<br />
= + −→ Ω<br />
dt<br />
R1 /R × −→ e θ = ( ˙θ −→ e φ + ˙φ −→ e z ) × −→ e θ = − ˙θ −→ e r + ˙φ<br />
R 1<br />
( d<br />
−→ )<br />
eθ<br />
= −<br />
dt<br />
˙θ −→ e r + ˙φ cos θ −→ e φ 2<br />
R<br />
−→ 0<br />
(<br />
sin<br />
−→ ez × −→ e<br />
} {{ θ<br />
}<br />
θ+ π 2<br />
)<br />
−→eφ<br />
( d<br />
−→ ) {( }} {<br />
eφ d<br />
−→ )<br />
eφ<br />
• d’où : = + −→ Ω<br />
dt<br />
R<br />
dt<br />
R1 /R × −→ e φ = ( ˙θ −→ e φ + ˙φ −→ e z ) × −→ e φ = ˙φ −→ e z × −→ e φ ≡ − ˙φ −→ e .<br />
R 1<br />
Comme : −→ e = sin θ −→ e r + cos θ −→ ( d<br />
−→ )<br />
eφ<br />
e θ , on obtient :<br />
= − ˙φ sin θ −→ e r − ˙φ cos θ −→ e θ 3<br />
dt<br />
R<br />
(d<br />
• De plus, comme −−−→<br />
−−→ ) (<br />
OM dr<br />
−→ )<br />
er<br />
v M/R =<br />
= = ˙r −→ ( d<br />
−→ )<br />
er<br />
e r + r<br />
dt<br />
dt<br />
dt<br />
R<br />
Rq1 : Avec 1 on obtient la vitesse en coordonnées sphériques : −−−→ v M/R = ˙r −→ e r + r ˙θ −→ e θ + r sin θ ˙φ −→ e φ<br />
Rq2 : On pourrait dériver à nouveau le vecteur vitesse, et, grâce à 1, 2 et 3, obtenir l’expression<br />
de l’accélération en coordonnées sphériques.<br />
d<br />
Dérivée temporelle d’un vecteur rotation d’entraînement<br />
• Supposons que −→ U ≡ −→ Ω R1 /R.<br />
( −→ ) ( −→ )<br />
d Ω R1 /R d Ω R1 /R<br />
La formule de Varignon s’écrit alors :<br />
=<br />
+ −→ Ω<br />
dt<br />
dt<br />
R1 /R × −→ Ω R1 /R<br />
} {{ }<br />
R<br />
R 1 −→ 0<br />
→ Donc les deux dérivées temporelles sont égales. Comme elles sont indépendantes du choix du<br />
référentiel R ou R 1 pour les exprimer, on peut se contenter de noter :<br />
( −→ ) ( −→ )<br />
d Ω R1 /R d Ω R1 /R<br />
=<br />
≡ d−→ Ω R1 /R<br />
dt<br />
dt<br />
dt<br />
R<br />
R 1<br />
4 http ://atelierprepa.over-blog.com/ Qadri J.-Ph. ∣ PTSI<br />
R<br />
.<br />
R
2009-2010 III. Loi de composition des vitesses <strong>M8</strong><br />
III<br />
III.1<br />
Loi de composition des vitesses<br />
Vitesse absolue et vitesse relative<br />
•<br />
⎧<br />
Pour un point M quelconque, on cherche la relation entre :<br />
⎪⎨<br />
sa vitesse absolue, définie dans le référentiel absolu R<br />
−−−−→<br />
(d −−→ )<br />
OM<br />
a v M/Ra =<br />
≡ −→ v a<br />
dt<br />
R a<br />
⎪⎩ sa vitesse relative, définie dans le référentiel relatif R<br />
−−−→<br />
(d −−−→ )<br />
O 1 M<br />
e v M/Re =<br />
≡ −→ v r<br />
dt<br />
R e<br />
• Comme −−→ OM = −−→ OO 1 + −−−→ O 1 M :<br />
−−−−→<br />
v M/Ra ≡<br />
(d −−→ )<br />
OM<br />
dt<br />
R a<br />
=<br />
(d −−→ )<br />
OO 1<br />
(d −−−→ )<br />
O 1 M<br />
+<br />
dt<br />
dt<br />
} {{<br />
R a}<br />
(d −−−→ )<br />
O 1 M<br />
dt<br />
} {{<br />
R } e<br />
−−−−→<br />
v M/R e<br />
= −−−−→ v O1 /Ra +<br />
❚ D’où la Loi de Composition des Vitesses :<br />
−−−−→<br />
v M/Ra = v −−−→<br />
M/Re + −−−−→ v O1 /R a<br />
+ −→ Ω Re /R a<br />
× −−−→ O 1 M<br />
R a<br />
+ −→ Ω Re /R a<br />
× −−−→ O 1 M<br />
(L.C.V.)<br />
III.2<br />
Point coïncidant et vitesse d’entraînement<br />
♦ Définition : Le point coïncidant, noté M ∗ , est le point :<br />
1 fixe dans R e (i.e. lié à R e )<br />
2 qui coïncide avec M. . .<br />
3 . . . à l’instant t considéré<br />
Rq : Bien comprendre que le point coïncidant est un point géométrique, puisqu’il est fixe dans<br />
R e , et non un point matériel comme le point M.<br />
Conséquences : 1 ⇒ −−−−→ v M∗/Re = −→ 0<br />
Dès lors, la loi de composition des vitesses appliquée au point M ∗ donne :<br />
−−−−→<br />
v M ∗ /R a<br />
=<br />
−−−−→ v M <br />
∗ /R e<br />
+ −−−−→ v O1 /R a<br />
+ −→ Ω Re /R a<br />
× O −−−→<br />
1 M ∗ ≡ −→ v e (M) avec M ∗ (t) = M(t)<br />
♦ Définition : On appelle vitesse d’entraînement du point M, notée −→ v e (M), la<br />
vitesse qu’aurait le point M dans le référentiel absolu si M était fixe dans R e , c’està-dire,<br />
si M était entraîné par le mouvement d’entraînement du référentiel relatif<br />
R e .<br />
❚ Propriété : On constate que la vitesse d’entraînement du point M correspond à la vitesse<br />
{ −−−−→<br />
v<br />
absolue du point coïncidant M ∗ :<br />
−→ M ∗ /R a<br />
ve (M) ≡<br />
−−−−→<br />
v O1 /R a<br />
+ −→ Ω Re /R a<br />
× −−−→ O 1 M<br />
❚ Propriété : La Loi de Composition des Vitesses s’écrit donc :<br />
−→ va = −→ v r + −→ v e<br />
⇔<br />
−−−−→<br />
v M/Ra } {{ }<br />
vitesse absolue<br />
= v −−−→<br />
M/Re + } {{ }<br />
vitesse relative<br />
−→ ve (M)<br />
} {{ }<br />
vitesse d’entraînement<br />
(L.C.V.)<br />
Qadri J.-Ph. ∣ PTSI http ://atelierprepa.over-blog.com/ 5
<strong>M8</strong> IV. Loi de composition des accélérations 2009-2010<br />
IV<br />
Loi de composition des accélérations<br />
IV.1 Accélération absolue et accélération relative<br />
Puisque −−−−→<br />
( d<br />
−−−−→ )<br />
v M/Ra<br />
a M/Ra ≡<br />
, on repart de la Loi de Composition des Vitesses<br />
dt<br />
R a<br />
−−−−→<br />
v M/Ra = v −−−→<br />
M/Re + −−−−→ v O1 /R a<br />
+ −→ Ω Re/Ra × −−−→ O 1 M<br />
qu’on dérive par rapport au temps terme à terme :<br />
( d<br />
−−−−→ )<br />
v M/Ra<br />
dt<br />
( d v<br />
−−−→ )<br />
M/Re<br />
dt<br />
( d<br />
−−−−→ )<br />
v O1 /R a<br />
dt<br />
R a<br />
=<br />
R a<br />
+<br />
R a<br />
+<br />
( −→ d( Ω Re /R a<br />
× −−−→ )<br />
O 1 M)<br />
En introduisant la notation simplifiée −→ Ω ≡ −→ Ω Re/Ra , ces dérivées deviennent :<br />
( d<br />
−−−→ ) (<br />
v M/Re d<br />
−−−→ )<br />
v M/Re<br />
•<br />
=<br />
+ −→ Ω × v −−−→<br />
dt<br />
R a<br />
dt<br />
M/Re = −−−−→ a M/Re + −→ Ω × v −−−→<br />
M/Re<br />
R e<br />
( d<br />
−−−−→ )<br />
v O1 /R<br />
•<br />
a<br />
≡ −−−−→ a<br />
dt<br />
O1 /R a<br />
R a<br />
( −→ d( Ω Re /R<br />
•<br />
a<br />
× −−−→ )<br />
O 1 M)<br />
= d−→ Ω<br />
(d<br />
dt<br />
dt × −−−→ O 1 M + −→ −−−→ )<br />
O 1 M<br />
Ω ×<br />
dt<br />
R a R a<br />
= d−→ Ω<br />
[(d<br />
dt × −−−→ O 1 M + −→ −−−→ )<br />
]<br />
O 1 M<br />
Ω ×<br />
+ −→ Ω × −−−→ O 1 M<br />
dt<br />
R e<br />
❚ D’où la Loi de Composition des Accélérations :<br />
= −→ Ω × ( −→ Ω × −−−→ O 1 M) + d−→ Ω<br />
dt × −−−→ O 1 M + −→ Ω × v −−−→<br />
M/Re<br />
dt<br />
R a<br />
−−−−→<br />
a M/Ra = −−−−→ a M/Re + −−−−→ a O1 /R a<br />
+ −→ Ω × ( −→ Ω × −−−→ O 1 M) + d−→ Ω<br />
dt × −−−→ O 1 M + 2 −→ Ω × v −−−→<br />
M/Re<br />
(L.C.A.)<br />
Avec : −−−−→ a M/Ra<br />
IV.2<br />
l’accélération absolue et −−−−→ a M/Re<br />
l’accélération relative.<br />
Point coïncidant et accélération d’entraînement<br />
Appliquons la L.C.A. au point coïncidant M ∗ sachant que par définition de M ∗ , puisque le point<br />
coïncidant est un point fixe du référentiel relatif :<br />
−−−−→<br />
v M ∗ /R e<br />
= −→ 0 et<br />
−−−−→<br />
a M ∗ /R e<br />
= −→ 0<br />
on obtient, avec M ∗ (t) = M(t) :<br />
a<br />
−−−−→<br />
M ∗ /R a<br />
=<br />
−−−−→ a M <br />
∗ /R e<br />
+ −−−−→ a O1 /R a<br />
+ −→ Ω × ( −→ Ω × O −−−→<br />
1 M ∗ ) + d−→ Ω<br />
dt × O −−−→<br />
1 M ∗ + 2 −→ Ω ×<br />
−−−−→ v M <br />
∗ /R e<br />
♦ Définition : On appelle accélération d’entraînement du point M, notée −→ a e (M),<br />
l’accélération qu’aurait le point M dans le référentiel absolu si M était fixe dans R e ,<br />
c’est-à-dire, si M était entraîné par le mouvement d’entraînement du référentiel relatif<br />
R e .<br />
❚ Propriété : Ainsi, l’accélération d’entraînement de M correspond à l’accélération absolue<br />
⎧<br />
⎪⎨ a<br />
−−−−→<br />
M ∗ /R a<br />
du point coïncidant M ∗ :<br />
−→ ae (M) ≡<br />
⎪⎩ −−−−→<br />
a O1 /R a<br />
+ −→ Ω × ( −→ Ω × −−−→ O 1 M) + d−→ Ω<br />
dt × −−−→ O 1 M<br />
6 http ://atelierprepa.over-blog.com/ Qadri J.-Ph. ∣ PTSI
2009-2010 VI. Mouvement d’entraînement par rotation ➜ Cf Cours <strong>M8</strong><br />
IV.3<br />
Accélération de Coriolis<br />
D’après la définition de l’accélération relative et de l’accélération d’entraînement, la L.C.A.<br />
s’écrit :<br />
−−−−→<br />
a M/Ra = −−−−→ a M/Re + −→ a e (M) + +2 −→ Ω × v −−−→<br />
M/Re<br />
♦ Définition : Important ! Expression à connaître par cœur !<br />
On appelle accélération de Coriolis, notée −→ a C (M), le terme :<br />
−→<br />
a C (M) = 2 −→ Ω Re /R a<br />
× v −−−→<br />
M/Re ⇔ −→ a C (M) = 2 −→ Ω × −→ v r<br />
IV.4<br />
Conclusion et remarques importantes<br />
❚ Propriété : La Loi de Composition des Accélérations (L.C.A.) s’écrit donc :<br />
−→ aa = −→ a r + −→ a e + −→ a C<br />
⇔<br />
−−−−→<br />
a M/Ra } {{ }<br />
accél. absolue<br />
= −−−−→ a M/Re + } {{ }<br />
accél. relative<br />
−→ ae (M)<br />
} {{ }<br />
accél. d’entraînement<br />
+ −→ a C (M)<br />
} {{ }<br />
accél. de Coriolis<br />
Rq1 : Dans l’accélération de Coriolis, la vitesse mise en jeu est la vitesse relative !<br />
Rq2 : D’après le programme, l’expression de l’accélération de Coriolis est à connaître par cœur.<br />
Rq3 : L’accélération d’entraînement se trouvera en cherchant à exprimer, au cas par cas,<br />
l’accélération du point coïncidant.<br />
Rq4 : Attention, excepté un cas exceptionnel (➜ Cf §V), on a : −→ a e ∕= d−→ v e<br />
dt<br />
V<br />
Mouvement d’entraînement par translation ➜ Cf Cours<br />
VI Mouvement d’entraînement par rotation ➜ Cf Cours<br />
Qadri J.-Ph. ∣ PTSI http ://atelierprepa.over-blog.com/ 7













