ETUDE EXPERIMENTALE D'UN MOTEUR A COURANT CONTINU
ETUDE EXPERIMENTALE D'UN MOTEUR A COURANT CONTINU
ETUDE EXPERIMENTALE D'UN MOTEUR A COURANT CONTINU
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
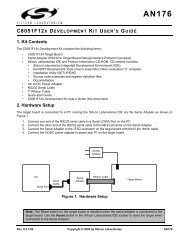
<strong>ETUDE</strong> <strong>EXPERIMENTALE</strong> <strong>D'UN</strong> <strong>MOTEUR</strong> A <strong>COURANT</strong> <strong>CONTINU</strong>Présentation du systèmeOn dispose d'un ensemble moteur - dynamo tachymétrique ESCAP 28HL18-219/264dont on donnera les caractéristiques constructeur pertinentes. Cet ensemble, commandé parl'induit, est alimenté par un générateur basse fréquence. La tension d'alimentation u(t) a laforme d'un créneau, et vaut 0.0 au début de l'expérience. L'achat d'un ensemble moteur etdynamo tachymétrique sous un même carter permet au constructeur de garantir que tous lesenroulements sont identiques.u(t)J mω(t)v DT(t)Oscilloscopenumérique+ imprimanteTravail à réaliser→ A partir du relevé expérimental ci-dessous, en utilisant la partie montante duV ( )créneau sur la tension d'alimentation u(t), montrer que la fonction de transfert DTp est duU ( p)Ktype et déterminer les deux paramètres K et τ.1+τp→ Etablir le schéma fonctionnel de ce système entre u(t) et v DT (t). En déduire laV ( )fonction de transfert théorique DTp en négligeant l'inductance du circuit d'induit et lesU ( p)frottements visqueux sur l'arbre moteur. Les caractéristiques constructeurs donnent :• Fiche moteur : Résistance aux bornes = 5,8 Ohm et Constante de couple = 22 milliNm/A.• Fiche moteur – dynamo tachymétrique : Pour une tension à vide de 12 Volts, on relèveune vitesse à vide de 5100 tours/mn, une inertie du rotor de 10,7 10 -7 kgm 2 et uneconstante de temps mécanique de 13 ms.Déterminer les paramètres de la fonction de transfert théorique à partir de ces données (il y atrois façons de déterminer la constante de temps ; vérifier qu'ils donnent des résultatscohérents).→ Comparer les valeurs expérimentales et théoriques obtenues pour la constante detemps. Proposez un explication pour la différence.
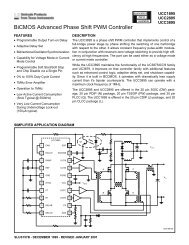
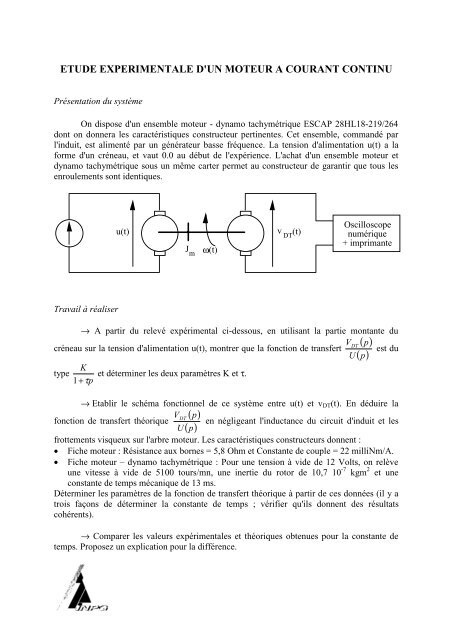
→ Comparer les valeurs expérimentales et théoriques obtenues pour le gain. Pourtrouver une explication on s'aidera de la courbe de ralentissement (passage de u(t) à zéro).32.521.510.50-0.50 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
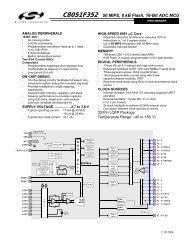
CORRECTIONDétermination de la fonction de transfert expérimentale.On examine l'allure de la réponse à l'échelon de 2,5 volts :La tangente à l'origine est non nulle ⇒ c'est donc un système du 1 er ordre.Il n'y a pas de dépassement ⇒ le système du 1 er ordre n'a pas de zéro.La fonction de transfert s'écrit donc :V DTU( p)K=( p) 1+ τpCalcul du gain K :32.42.521.510.50-0.50 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.52.4 − 0D'où un gain égal à : K = = 0. 962.5 − 0Calcul de la constante de temps τ :Il faut choisir une méthode. Vu la courbe expérimentale (échelon) trois méthodes sontpossibles.1. La première est le tracé de la tangente à l'origine qui coupe l'asymptote de la valeurfinale de v DT (t) pour t=τ. Cette méthode est à éviter lorsque seul un enregistrement
"papier" est disponible et qu'une autre méthode est possible. En effet le tracé d'unetangente au moyen d'une règle sur un tracé expérimental est très difficile et conduità des résultats imprécis (parfois 50 à 100% d'erreur).2. La deuxième consiste à tracer une droite à 95% de la valeur finale de v DT (t).Lorsque la courbe v DT (t) coupe cette droite, alors le temps mesuré est égal à 3τ.3. La dernière ici consiste à mesure le temps t pour lequel v DT (t) atteint 63% de savaleur finale. Alors t=τ.32.42.52-5%1.5163%0.50-0.50 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5On trouve une valeur τ = 28 msτ3τMise en équation du systèmeRappel des équations d'un moteur à courant continu commandé par l'induit :• Equation électrique :diU = Ri + L + E où E est la fcemdtAprès transformée de Laplace, on obtient U ( p) − E( p) = ( R + Lp) I( p)Ainsi, la différence de tension entre U et la force contre-électromotrice Epassée à travers le filtre 1/(R+Lp) est la cause du courant i dans l'induit.
• 1 ère équation de liaison :m = kiγAprès transformée de Laplace, on obtient Γ m( p) = kI( p)Ainsi, le courant i dans l'induit génère grâce au flux magnétique le couplemoteur sur l'arbre mécanique.• Equation mécanique :dωJ γmfωdt= −Après transformée de Laplace, on obtient Γm( p) = ( f + Jp) Ω( p)Ainsi, le couple moteur entraîne l'arbre mécanique et crée la vitesse de rotation.• 2 ème équation de liaison :E = kωAprès transformée de Laplace, on obtient E( p) = kΩ( p)Ainsi, la vitesse de l'arbre moteur crée la force contre-électromotrice E.Equations pour la dynamo tachymétrique :• Equation mécanique : l'arbre est commun au moteur et à la dynamo ; cetteéquation a donc déjà été écrite.• Equation électrique : la charge de la dynamo est un appareil de mesure à forteimpédance. Par conséquent v DT (t) est la f.e.m. délivrée par la dynamo.• Il n'y a donc qu'une seule équation de liaison à écrire qui concerne latransformation de ω(t) en v DT (t) : V DT( p) = kΩ( p), avec le même coefficient "k"que pour le moteur (le constructeur garanti que les enroulements sont identiques).Par conséquent, il existe un schéma fonctionnel sous jacent à ces équations :U+1R + Lpikγ m1f + JpωkV DT−EkEn négligeant l'inductance L du circuit d'induit et les frottements f sur l'arbre moteur,le schéma fonctionnel devient :U+−1Rikγ m1JpωkV DTEk
On obtient l'équation différentielle suivante :Ω 1 1( p)= .U k RJ1+p2kD'où :V 1DT ( p)=U RJ1+pk2Détermination des paramètres de la fonction de transfert à partir des donnéesconstructeur :Le gain de la fonction de transfert est unitaire.La fiche moteur – dynamo tachymétrique donne la valeur de la "constante de tempsmécanique". On a donc τ = RJms2k= 13 .La fiche moteur indique R = 5,8 Ohm et k = 22 10 -3 NmA. La fiche moteur – dynamotachymétrique donne J = 10,7 10 -7 kgm 2 . On en déduit :τ = RJms2k= 12,8 .Il existe enfin une deuxième méthode pour trouver la valeur de k, en exploitantl'information sur les spécifications constructeur : on mesure une tension de 12V pour unevitesse à vide de 5100 tours/mn. Alors k = 12V / (5100 tours/mn), et l'on retrouve en unités SIk = 22 10 -3 V/(rad/s).Comparaison des constantes de temps expérimentales et constructeurOn a τ exp = 28ms et τ cons = 13ms.La courbe expérimentale étant bien du type premier ordre, nous n'avons pas a priori àremettre en cause le fait que l'inductance du circuit d'induit, L, et les frottements visqueux fsoient négligeables.Les paramètres J et k sont propres au moteur, ne peuvent être modifiés par l'utilisateuret sont certifiés par le constructeur. Ils peuvent donc être considérés comme sûrs.Par contre la résistance du circuit d'induit, R, résulte de la résistance propre au moteur,et d'éventuelles résistances supplémentaires ajoutées par l'utilisateur. En effet, pour lesbesoins de la manipulation, on a ajouté une résistance sur le circuit d'induit afin de ralentir lemoteur.La résistance effective sur la manipulation est R = 12,6 Ohm.−712,6*10,7.10Un nouveau calcul de τ donne : τcons== 29, 7ms−32( 22.10 )On retrouve deux valeurs cohérentes.
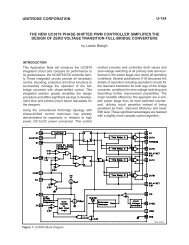
Comparaison des gains expérimentaux et constructeurOn a G exp = 0.96 et G théo = 1.Examinons la courbe de ralentissement. Elle correspond à un échelon descendant surl'alimentation U du moteur (de 2,5 à 0 volts). On s'attend donc à observer l'allure d'uneréponse d'un premier ordre à un échelon (exponentielle décroissante qui tend vers 0 lorsque ttend vers l'infini). Or on constate au contraire un arrêt brusque du moteur.32.5ε21.510.50-0.50 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Ce phénomène est typique de frottement secs sur un système mécanique en rotation(exemple des freins). Prenons en compte ce phénomène dans le schéma fonctionnel dumoteur :U+1Rikγ m+γ s−1JpωkV DT−EkL'échelon montant de U appliqué au moteur sert à créer un couple moteur γ m quientraîne l'arbre. Cependant l'existence de γ s fait que le couple moteur effectif entraînant l'arbreest γ m - γ s . Ainsi une partie de l'échelon U sert à compenser les frottements secs γ s . L'écart εentre v DT et U sur l'enregistrement expérimental, correspond à l'équivalent en tension des
frottements secs. C'est la raison pour laquelle on mesure sur la courbe un gain apparent de0.96 au lieu du gain unitaire effectif.On mesure ε = 0.1 volt. Le coefficient pour passer de U à γ s selon le schémafonctionnel vaut "k/R". On a donc :k 0,0022*0,1ε = 0,1volts γs= ε == 1,75e− 5 NmR 12,6Pour le ralentissement, on retrouve bien la réponse à un échelon d'un système du 1 erordre de gain unitaire. Cependant, lorsque la vitesse diminue, la force contre électromotriceE diminue. Elle finit par avoir une valeur critique qui crée un γ m juste égal à γ s et le moteuratteint une vitesse ω nulle. Le moteur n'étant plus alimenté, il ne peut repartir en sens inverse,et le moteur s'arrête brutalement.