Aerodinamica dell´autogiro - Alessio Bartoloni
Aerodinamica dell´autogiro - Alessio Bartoloni
Aerodinamica dell´autogiro - Alessio Bartoloni

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
16. CAPITOLO 16<br />
AERODINAMICA DELL’AUTOGIRO<br />
Sia gli elicotteri che gli autogiri traggono portanza dall’uso di profili aerodinamici e quindi, molti dei<br />
principi aerodinamici di base relativi alla produzione di portanza sono applicabili ad entrambi i<br />
velivoli.<br />
AUTOROTAZIONE<br />
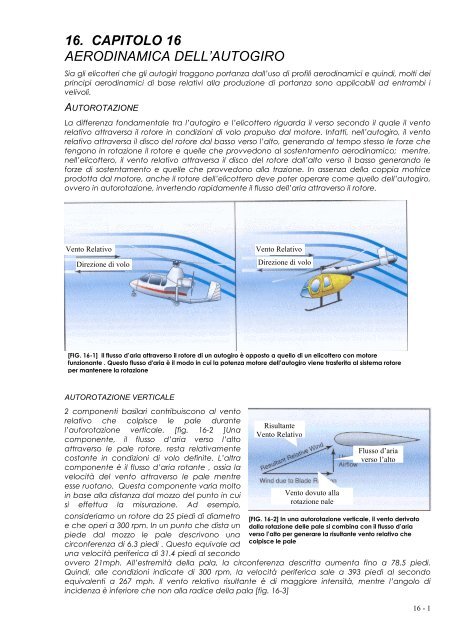
La differenza fondamentale tra l’autogiro e l’elicottero riguarda il verso secondo il quale il vento<br />
relativo attraversa il rotore in condizioni di volo propulso dal motore. Infatti, nell’autogiro, il vento<br />
relativo attraversa il disco del rotore dal basso verso l’alto, generando al tempo stesso le forze che<br />
tengono in rotazione il rotore e quelle che provvedono al sostentamento aerodinamico; mentre,<br />
nell’elicottero, il vento relativo attraversa il disco del rotore dall’alto verso il basso generando le<br />
forze di sostentamento e quelle che provvedono alla trazione. In assenza della coppia motrice<br />
prodotta dal motore, anche il rotore dell’elicottero deve poter operare come quello dell’autogiro,<br />
ovvero in autorotazione, invertendo rapidamente il flusso dell’aria attraverso il rotore.<br />
Vento Relativo<br />
Direzione di volo<br />
motore. [FIG. 16-1] Il flusso d’aria attraverso il rotore di un autogiro è opposto a quello di un elicottero con motore<br />
funzionante . Questo flusso d'aria è il modo in cui la potenza motore dell’autogiro viene trasferita al sistema rotore<br />
per mantenere la rotazione<br />
AUTOROTAZIONE VERTICALE<br />
2 componenti basilari contribuiscono al vento<br />
relativo che colpisce le pale durante<br />
l’autorotazione verticale. [fig. 16-2 ]Una<br />
componente, il flusso d’aria verso l’alto<br />
attraverso le pale rotore, resta relativamente<br />
costante in condizioni di volo definite. L’altra<br />
componente è il flusso d’aria rotante , ossia la<br />
velocità del vento attraverso le pale mentre<br />
esse ruotano. Questa componente varia molto<br />
in base alla distanza dal mozzo del punto in cui<br />
si effettua la misurazione. Ad esempio,<br />
consideriamo un rotore da 25 piedi di diametro<br />
e che operi a 300 rpm. In un punto che dista un<br />
piede dal mozzo le pale descrivono una<br />
circonferenza di 6.3 piedi . Questo equivale ad<br />
una velocità periferica di 31.4 piedi al secondo<br />
Vento Relativo<br />
Direzione di volo<br />
Risultante<br />
Vento Relativo<br />
Vento dovuto alla<br />
rotazione pale<br />
Flusso d’aria<br />
verso l’alto<br />
[FIG. 16-2] In una autorotazione verticale, il vento derivato<br />
dalla rotazione delle pale si combina con il flusso d’aria<br />
verso l’alto per generare la risultante vento relativo che<br />
colpisce le pale<br />
ovvero 21mph. All’estremità della pala, la circonferenza descritta aumenta fino a 78.5 piedi.<br />
Quindi, alle condizioni indicate di 300 rpm, la velocità periferica sale a 393 piedi al secondo<br />
equivalenti a 267 mph. Il vento relativo risultante è di maggiore intensità, mentre l’angolo di<br />
incidenza è inferiore che non alla radice della pala [fig. 16-3]<br />
16 - 1
Flusso a salire<br />
17 mph o 25 fps<br />
[Fig. 16-3 ] Muovendosi verso l’esterno lungo la pala rotore, la velocità di<br />
rotazione aumenta eccedendo la componente verso l’alto del flusso, il<br />
risultato è un più alto vento relativo a un minore angolo d’incidenza<br />
REGIONI DEL DISCO ROTORE<br />
Come per qualsiasi profilo aerodinamico, la<br />
portanza generata dalle pale rotore è<br />
perpendicolare alla direzione del vento relativo.<br />
Dato che il vento relativo sulle pale rotore in<br />
autorotazione varia da un alto angolo<br />
d’incidenza all’interno a un basso angolo<br />
d’incidenza all’esterno, la portanza ha un’alta<br />
componente nel senso dell’avanzamento<br />
nell’area vicino al mozzo ed un’alta<br />
componente nel senso verticale vicino<br />
all’estremità. Questo determina che aree distinte<br />
del disco rotore generino le forze necessarie al<br />
volo autorotativo. [fig. 16-4] La regione<br />
autorotativa , o “trainante” genera una forza<br />
aerodinamica totale la cui componente<br />
avanzante supera tutte le forze di resistenza e<br />
mantiene in rotazione il rotore stesso. La regione<br />
propulsa, o “trainata” , genera una forza<br />
aerodinamica totale , la cui alta componente<br />
verticale permette il sostentamento in aria<br />
dell’autogiro. Vicino al mozzo, invece, vi è<br />
un’area di stallo dove la componente del vento<br />
relativo è così bassa che l’angolo d’incidenza<br />
risultante è sotto il limite di stallo per il profilo<br />
stesso. L’area di stallo crea una resistenza rispetto<br />
alla direzione di rotazione che deve essere<br />
compensata dalle forze avanzanti generate<br />
dalla zona “trainante”.<br />
AUTOROTAZIONE NEL VOLO AVANZANTE<br />
AUTOROTAZIONE VERICALE<br />
Velocità rotore : 300 r.p.m.<br />
Di stallo<br />
Flusso a salire<br />
17 mph o 25 fps<br />
Mozzo<br />
Risultante<br />
vento relativo<br />
Flusso rotante 21 mph o 31 fps<br />
Estremità Risultante<br />
vento relativo<br />
Flusso rotante 21 mph o 31 fps<br />
Flusso verso alto<br />
attraverso rotore<br />
Asse di<br />
rotazione<br />
Regione “trainante”<br />
AUTOROTAZIONE VERTICALE<br />
Regione “Trainata”<br />
Regione “Trainante”<br />
Regione<br />
Di stallo<br />
Regione “trainata”<br />
(Elica)<br />
Forza <strong>Aerodinamica</strong><br />
tot.<br />
portanza Davanti allo<br />
Vento relativo asse di rotaz. Port.<br />
rotativo<br />
resistenza<br />
Regione “trainante”<br />
(Autorotativa)<br />
Regione di stallo<br />
Pala stallata<br />
[Fig. 16-4 ] La forza aerodinamica totale è davanti all’asse di rotazione<br />
nella regione “trainante” . La resistenza supera la forza aerodinamica<br />
nella regione di stallo.<br />
Chiarito, per semplicità, il principio dell’autorotazione nell’ambito di un moto semplicemente<br />
verticale, bisogna ora considerare, in maniera più attinente alla pratica del volo con l’autogiro, ciò<br />
che accade quando il vento relativo che investe le pale ammette anche una componente di<br />
traslazione. Questa componente non ha effetto sui principi aerodinamici che fanno ruotare le<br />
pale, ma causa lo spostamento delle regioni del disco rotore. Effettivamente, quando l’autogiro si<br />
muove in avanti nell’aria, la velocità d’avanzamento si aggiunge al vento relativo che colpisce la<br />
pala avanzante, e si sottrae dal vento relativo che colpisce la pala retrocedente. Per evitare che si<br />
creino forze impari sui lati del disco rotore, la pala avanzante oscilla verso l’alto riducendo l’angolo<br />
l. corda<br />
Risultante<br />
vento rel.<br />
flusso<br />
Asse di<br />
rotazione<br />
Forza <strong>Aerodinamica</strong><br />
tot.<br />
Dietro allo<br />
asse di rotaz.<br />
resistenza<br />
Pala<br />
avanzante<br />
flusso<br />
Port.<br />
Asse di<br />
rotazione<br />
16 - 2<br />
Forza <strong>Aerodinamica</strong><br />
totale<br />
resistenza
d’incidenza, mentre la pala retrocedente oscilla verso il basso aumentando l’angolo d’incidenza e<br />
la portanza. L’angolo d’incidenza minore della pala avanzante fa si che una maggior parte della<br />
pala stessa sia da considerarsi nella regione “trainata”, mentre il maggior angolo d’incidenza della<br />
pala retrocedente fa si che una maggior parte della stessa essa si trovi nella regione di stallo. Il<br />
risultato è uno “slittamento” delle regioni verso il lato retrocedente del disco rotore<br />
proporzionalmente alla velocità di avanzamento del velivolo [Fig. 16-5]<br />
FLUSSO INVERSO<br />
In un sistema rotore in volo avanzante il flusso<br />
inverso si verifica vicino al mozzo sul lato<br />
retrocedente del disco rotore. Questo è il<br />
risultato della velocità d’avanzamento del<br />
velivolo che supera la velocità di rotazione<br />
delle pale. Per esempio , a 2 piedi di distanza<br />
dal mozzo la pala descrive un cerchio di 12.6<br />
piedi di circonferenza. A 300 rpm rotore la<br />
pala , nel punto indicato, ha una velocità di<br />
42 mph. . Se il velivolo si muove a 42 mph. La<br />
velocità di avanzamento contrasta la<br />
velocità di rotazione della pala retrocedente<br />
nel punto in cui essa ruota alla stessa velocità<br />
(quindi a 2 piedi dal mozzo). Quindi nella<br />
pala retrocedente, nella parte compresa tra<br />
il mozzo ed il punto a 2 piedi i distanza dallo<br />
stesso, la velocità di avanzamento è<br />
maggiore della velocità di rotazione in misura<br />
crescente più ci si avvicina al mozzo. Ne<br />
risulta che il flusso colpisce il bordo d’uscita<br />
della pala, con una velocità via via crescente<br />
[Fig. 16-5] Le regioni del disco rotore nel volo autorotativo<br />
avanzante<br />
verso il mozzo del rotore [Fig. 16-6] LA dimensione dell’area soggetta a flusso inverso è determinata<br />
primariamente dalla velocità di avanzamento del velivolo, velocità maggiori corrispondono a<br />
maggiori dimensioni dell’area soggetta a flusso inverso. In qualche modo, anche la velocità di<br />
rotazione del rotore ha un qualche effetto sulla dimensione dell’area, quando il rotore opera a<br />
bassi giri risulta molto più soggetto al flusso inverso e soprattutto la porzione di pala soggetta è di<br />
dimensioni maggiori.<br />
STALLO DELLA PALA RETROCEDENTE<br />
Lo stallo della pala retrocedente dell’autogiro<br />
differisce da quello dell’elicottero dove si verifica<br />
lontano da mozzo in una posizione compresa tra il<br />
20% e il 40% piuttosto che all’estremità della pala.<br />
Dato che l’autogiro opera in avanzamento, la<br />
regione di stallo si accentra verso l’interno sulla<br />
pala retrocedente [fig. 16-5] Aumentando la<br />
velocità, l’angolo d’incidenza della pala<br />
retrocedente aumenta per prevenire la<br />
dissimmetria di portanza e l’area di stallo si muove<br />
verso l’esterno della pala retrocedente. Dato che<br />
comunque la regione di stallo della pala è<br />
piuttosto interna e non verso l’esterno della pala,<br />
come sull’elicottero, si crea meno forza sul centro<br />
di gravità del velivolo. Quindi anche se avvertite<br />
un aumento di vibrazione non vi troverete ad<br />
affrontare tendenza al beccheggio o al rollio.<br />
FORZA DEL ROTORE<br />
Come per qualsiasi velivolo più pesante dell’aria ,<br />
vi sono 4 forze che agiscono su un autogiro in volo<br />
che sono: portanza, peso, trazione e resistenza.<br />
Pala<br />
retrocedente<br />
Direzione di volo<br />
Regione “trainata”<br />
Regione<br />
“trainante<br />
Volo avanzante<br />
a 42 mph<br />
Area soggetta a<br />
flusso inverso<br />
Velocità rotore 300<br />
rpm,<br />
Pala<br />
avanzante<br />
[Fig. 16-6] Un area di flusso inverso si forma sulla pala<br />
retrocedente nel volo avanzante come effetto della velocità di<br />
avanzamento maggiore della velocità di rotazione delle pale.<br />
16 - 3
L’autogiro ottiene la portanza dal rotore e la trazione direttamente dal motore attraverso<br />
l’elica.[fig. 16-7]. La forza prodotta dal rotore dell’autogiro può essere divisa in 2 componenti:<br />
portanza e resistenza del rotore. La componente della forza rotore perpendicolare al volo è la<br />
portanza, la componente della forza rotore parallela al volo è la resistenza. Per ottenere la<br />
resistenza totale del velivolo bisogna aggiungere alla resistenza del rotore la resistenza del corpo<br />
del velivolo.<br />
[Fig. 16-7]<br />
Al contrario<br />
di come agisce<br />
nell’elicottero,<br />
la risultante<br />
della forza<br />
rotore di un<br />
autogiro in<br />
volo<br />
avanzante,<br />
agisce<br />
all’indietro<br />
PORTANZA ROTORE<br />
La portanza del rotore può essere visualizzata facilmente come la portanza necessaria per<br />
sostenere in aria il peso del velivolo Quando un profilo aerodinamico produce portanza , si crea<br />
anche della resistenza indotta. Il miglior angolo d’incidenza per un dato profilo è quello che<br />
permette di avere la maggiore portanza e la minor resistenza. Tuttavia durante le varie evoluzioni<br />
di volo il rotore non sempre opera con il miglior angolo d’incidenza per il profilo delle pale , Inoltre<br />
il rotore deve mantenere un assetto nella gamma (bassa) che permetta l’autorotazione che<br />
genera la portanza. Alcuni autogiri utilizzano piccole ali che generano portanza alle alte velocità.<br />
La portanza generata dalle ali si somma o addirittura sostituisce la portanza generata dal rotore<br />
generando meno resistenza indotta.<br />
RESISENZA ROTORE<br />
La resistenza rotore totale è la somma di tutte le resistenze che agiscono sul profilo in ogni posizione<br />
della pala. La posizione di ciascuna pala contribuisce alla resistenza totale in base alla velocità e<br />
all’angolo del profilo in tale posizione. Mentre le pale rotore ruotano, si verificano rapidi<br />
cambiamenti sul profilo, in base alla posizione alla velocità del rotore ed alla velocità del velivolo..<br />
Una variazione dell’angolo d’incidenza del disco rotore corrisponde ad un rapido e sostanziale<br />
cambiamento nella resistenza totale del rotore. La resistenza rotore si può dividere in due<br />
componenti: resistenza indotta e resistenza del profilo. La resistenza indotta è un prodotto della<br />
portanza, mentre la resistenza del profilo è in funzione dei giri rotore. Dato che la resistenza indotta<br />
è la resistenza generata dal rotore che crea portanza, possiamo considerare la resistenza del<br />
profilo come la resistenza del rotore che non genera portanza. Per visualizzare la resistenza del<br />
profilo considerate la resistenza che si deve vincere per prerotare fino agli rpm rotore idonei al volo,<br />
ossia in una fase in cui il rotore non genera portanza. Questa situazione si può ottenere con un<br />
sistema rotore con un profilo simmetrico e una capacità di variazione di passo mettendo le pale<br />
ad angolo d’incidenza uguale a 0°. Un sistema rotore con un profilo asimmetrico ed un passo<br />
predeterminato, come quello della maggior parte dei sistemi oscillanti amatoriali, non può essere<br />
prerotato senza vincere anche una parte di resistenza indotta.<br />
TRAZIONE<br />
Risultante<br />
Trazione<br />
Portanza<br />
Peso<br />
Resistenza<br />
Trazione<br />
Risultante Risultante<br />
Portanza<br />
Risultante<br />
LA trazione di un autogiro è definita come la componente parallela al vento relativo della forza<br />
totale dell’elica. Come tutte le forze che agiscono su un velivolo anch’essa agisce attorno al<br />
Centro di Gravità. In base al punto d’applicazione della trazione una sua componente può<br />
Peso<br />
Resist. Rot.<br />
Resist.<br />
“corpo”<br />
16 - 4
isultare normale al vento relativo e quindi agire in combinazione con la portanza o con il peso. In<br />
volo , il corpo dell’autogiro è da considerarsi fondamentalmente come un grave sospeso al rotore,<br />
e come tale è soggetto, come l’elicottero, all’azione pendolare 1 . A differenza dell’elicottero,<br />
tuttavia, la trazione è applicata direttamente alla struttura anziché essere ottenuta attraverso il<br />
sistema rotore. Ne risulta che le forze che agiscono su<br />
un autogiro in volo sono diverse da quelle che<br />
agiscono su un elicottero nelle stesse condizioni. Ad<br />
esempio la coppia motore tende a far ruotare la<br />
struttura nella direzione opposta al senso di rotazione<br />
dell’elica, il risultato è una rotazione del corpo di<br />
circa 2 gradi rispetto all’asse verticale [Fig. 16-8]<br />
Questo leggero disassamento è normalmente<br />
tralasciato e non è considerato rilevante per la<br />
maggior parte delle normali operazioni di volo<br />
STABILITÀ<br />
La stabilità è uno degli obiettivi progettuali di un<br />
velivolo per ridurre il carico di lavoro a cui il pilota è<br />
sottoposto e per aumentare la sicurezza. Un velivolo<br />
stabile, come i tipici aerei da addestramento, richiede<br />
meno attenzione da parte del pilota per mantenere<br />
[Fig. 16-8] – La coppia motore applicata all’elica ottiene<br />
un’uguale ed opposta reazione del corpo , inclinandolo<br />
durante il volo di pochi gradi rispetto al piano verticale<br />
l’assetto di volo desiderato, anzi tende generalmente ad auto-correggere i disturbi derivati da<br />
raffiche di vento o da altre forze esterne. Al contrario per mantenere sotto controllo un velivolo<br />
instabile serve intensa e costante attenzione da parte del pilota. I fattori che contribuiscono alla<br />
stabilità di un autogiro sono vari. Uno è il posizionamento dello stabilizzatore orizzontale. Un altro è<br />
la posizione della resistenza del corpo rispetto al centro di gravità del velivolo. Un terzo fattore è il<br />
momento di inerzia attorno all’asse di beccheggio, mentre un quarto è dato dalla relazione tra la<br />
posizione della linea di spinta dell’elica e la posizione verticale del centro di gravità. Tuttavia il<br />
fattore forse più critico è la relazione tra la linea di forza del rotore e la localizzazione orizzontale del<br />
Centro di Gravità.<br />
STABILIZZATORI ORIZZONTALI<br />
Lo stabilizzatore orizzontale aiuta la stabilità longitudinale o di beccheggio. I fattori che ne<br />
determinano la sua efficienza sono: le dimensioni della superficie e la sua distanza dal centro di<br />
gravità, la velocità di volo e l’influenza del flusso dell’elica.<br />
RESISTENZA DEL CORPO DEL VELIVOLO (CENTRO DI PRESSIONE)<br />
Se il punto in cui si concentra la forza di resistenza del “corpo” del velivolo o il centro di pressione<br />
delle forze, si situa dietro al CG, l’autogiro è generalmente considerato più stabile in particolare<br />
intorno all’asse di imbardata, contribuendo a ciò l’adeguato dimensionamento di un superficie di<br />
coda verticale. Tuttavia, per ottenere il miglior risultato, senza però compromettere il controllo<br />
generale dell’apparecchio, deve prevedersi un adeguato bilanciamento del centro di pressione<br />
longitudinale, in relazione all’autorità di comando del passo ciclico, in modo che quest’ultima sia<br />
sufficiente, a qualunque velocità ad evitare che il naso si abbassi o si alzi mentre la pressione si<br />
accumula sulla parte anteriore.<br />
MOMENTO DI INERZIA INTORNO ALL’ASSE DI BECCHEGGIO<br />
Coppia<br />
applicata<br />
all’elica<br />
Reazione del<br />
“corpo” del<br />
velivolo<br />
Si può affermare che, a parità di peso totale e di posizione del centro di gravità, l’ autogiro risulta<br />
più stabile quanto più le masse sono piazzate lontano dal CG. Ad esempio se il sedile del pilota si<br />
potesse muovere in avanti , allontanandolo dal CG, ed il motore si potesse muovere indietro,<br />
allontanando anch’esso dal CG ma mantenendo invariata la posizione del CG stesso, si<br />
otterrebbe un autogiro più stabile rispetto a quello di partenza. Gli acrobati che camminano sul filo<br />
utilizzano lo stesso principio quando usano un lungo bilanciere.<br />
16 - 5
LINEA DI SPINTA DELL’ELICA<br />
Considerando solo la linea di spinta dell’elica, se tale linea si trova sopra al CG, l’autogiro avrà la<br />
tendenza a picchiare quando si applica potenza, ed a cabrare quando si toglie potenza.<br />
Ovviamente se la linea di spinta dell’elica si colloca al di sotto del CG vige l’opposto. Se la linea di<br />
spinta dell’elica attraversa il CG o quantomeno si situa molto vicino ad esso, l’autogiro non avrà<br />
tendenza a cabrare o picchiare durante le variazioni di potenza[Fig. 16-9]<br />
Linea spinta elica<br />
FORZA ROTORE<br />
BASSO PROFILO ALTO PROFILO<br />
Indipendentemente dall’adozione o meno di piani stabilizzatori orizzontali, la posizione del CG<br />
rispetto alla linea d’azione della forza del rotore influenza la stabilità di beccheggio[Fig. 16-10].<br />
Vediamo, infatti, quale sarebbe il comportamento del velivolo, nelle due diverse condizioni,<br />
allorquando venga colpito da una raffica di vento frontale che incrementi considerevolmente la<br />
forza aerodinamica del rotore:<br />
• CG dietro la linea di forza del rotore.<br />
Aumentando la forza del rotore, interviene un momento cabrante che, se non contrastato<br />
dal pilota, produce un aumento dell’angolo di incidenza del rotore e quindi un aumento<br />
ulteriore della forza stessa, ingenerando così una condizione di instabilità che richiede<br />
necessariamente il continuo intervento sul comando di beccheggio;<br />
• CG davanti alla linea di forza del rotore.<br />
Linea spinta elica<br />
Centro di gravità Centro di gravità<br />
[FIG: 16-9] – Un autogiro la cui linea di spinta dell’elica è sopra al CG viene spesso chiamato a BASSO PROFILO. Un autogiro la cui<br />
linea di spinta dell’elica passa per il CG o si situa al di sotto dello stesso viene considerato ad ALTO PROFILO<br />
Aumentando la forza del rotore, interviene un momento picchiante che, senza l’intervento<br />
del pilota, produce una diminuzione dell’angolo di incidenza del rotore e quindi una<br />
diminuzione della forza aerodinamica stessa, contribuendo automaticamente alla stabilità<br />
longitudinale.<br />
16 - 6
CONDIZIONI TRIMMATE<br />
Come già affermato prima, i costruttori usano una combinazione dei vari fattori di stabilità per<br />
ottenere un autogiro trimmato. Ad esempio in un autogiro dove il baricentro è sotto la linea di<br />
spinta, all’aumento della potenza ne risulterà un momento a picchiare, per compensare il quale, di<br />
solito, si fa in modo che lo stesso baricentro sia situato dietro alla linea di forza del rotore, dato che<br />
questa configurazione tende a dare un momento a cabrare.<br />
Per contro, se il CG è sopra alla linea di spinta dell’elica, potrebbe risultare utile che si trovi anche<br />
davanti alla linea di forza del rotore. Ovviamente la posizione della resistenza del corpo del<br />
velivolo, l’inerzia d’assetto e le variazioni apportate dagli stabilizzatori orizzontali possono<br />
modificare gli effetti stabilizzanti e/o destabilizzanti dovuti alla collocazione del baricentro,<br />
risultando vitale per la sicurezza il rispetto dei limiti di manovra imposti dal Costruttore.<br />
16 - 7