

sistema in retroazione unitaria - Automatica
sistema in retroazione unitaria - Automatica
sistema in retroazione unitaria - Automatica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Formulazione delle specifiche<br />
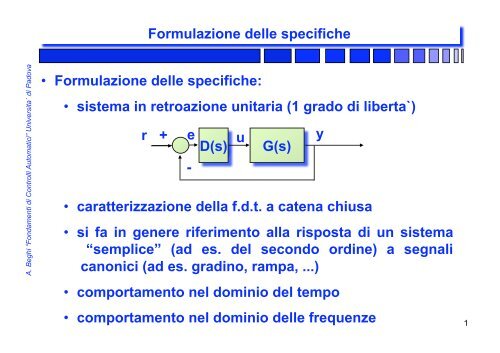
• Formulazione delle specifiche:<br />
• <strong>sistema</strong> <strong>in</strong> <strong>retroazione</strong> <strong>unitaria</strong> (1 grado di liberta`)<br />
r<br />
+ e D(s) u<br />
-<br />
G(s)<br />
• caratterizzazione della f.d.t. a catena chiusa<br />
• si fa <strong>in</strong> genere riferimento alla risposta di un <strong>sistema</strong><br />
“semplice” (ad es. del secondo ord<strong>in</strong>e) a segnali<br />
canonici (ad es. grad<strong>in</strong>o, rampa, ...)<br />
• comportamento nel dom<strong>in</strong>io del tempo<br />
• comportamento nel dom<strong>in</strong>io delle frequenze<br />
y<br />
1
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Formulazione delle specifiche<br />
• Tipiche specifiche di progetto sono fornite <strong>in</strong> term<strong>in</strong>i di:<br />
• stabilita` (del <strong>sistema</strong> a catena chiusa, ma anche del<br />
controllore stesso, o di altre f.d.t. di <strong>in</strong>teresse)<br />
• errore a regime nella risposta a segnali canonici<br />
• prontezza del <strong>sistema</strong><br />
• capacita` smorzante<br />
• <strong>in</strong>sensibilita` alle variazioni parametriche e/o disturbi<br />
agenti sul <strong>sistema</strong><br />
• Traduzione <strong>in</strong> term<strong>in</strong>i di valori quantitativi di alcuni<br />
parametri<br />
2
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Formulazione delle specifiche<br />
• Stabilita` (del <strong>sistema</strong> <strong>in</strong> <strong>retroazione</strong>) ⇒ marg<strong>in</strong>i di<br />
stabilita` PM, GM<br />
• Regime transitorio:<br />
• prontezza ⇒ tempo di salita t r<br />
• capacita` smorzante ⇒ sovraelongazione M p<br />
• Regime permanente:<br />
• errore a regime e r (risposta ad <strong>in</strong>gressi canonici)<br />
• tipo<br />
• Caratterizzazione nel dom<strong>in</strong>io del tempo ⇒<br />
caratterizzazione nel dom<strong>in</strong>io della frequenza<br />
3
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Prontezza:<br />
Formulazione delle specifiche<br />
• <strong>sistema</strong> “pronto” ⇒ t r “piccolo” ⇒ elevata banda<br />
passante B del <strong>sistema</strong> <strong>in</strong> catena chiusa<br />
• Capacita` smorzante:<br />
• <strong>sistema</strong> “smorzato” (ζ grande) ⇒ M p “piccolo” ⇒<br />
massimo di risonanza M r “piccolo” nella risposta <strong>in</strong><br />
frequenza<br />
• PM elevato<br />
4
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Formulazione delle specifiche<br />
• Errore a regime: legato al valore della funzione di risposta<br />
armonica per ω ≈0<br />
• Tipo: numero di poli nell’orig<strong>in</strong>e della f.d.t. <strong>in</strong> catena<br />
diretta<br />
• Sensibilita` alle variazioni parametriche ⇒ “sagomatura”<br />
della risposta <strong>in</strong> frequenza<br />
• Progetto del controllore: determ<strong>in</strong>are il tipo di azione da<br />
effettuare tramite D(s) sul processo da controllare G(s)<br />
per garantire che a catena chiusa T(s) soddisfi le<br />
specifiche<br />
• Azioni elementari di controllo<br />
5
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• S<strong>in</strong>tesi di Bode: e` basata sulla formulazione di alcune<br />
specifiche del <strong>sistema</strong> a catena chiusa <strong>in</strong> term<strong>in</strong>i di<br />
caratteristiche del term<strong>in</strong>e <strong>in</strong> catena diretta L(s)=D(s)G(s)<br />
• E` detta anche s<strong>in</strong>tesi per tentativi (richiede <strong>in</strong> genere<br />
diverse iterazioni)<br />
• Specifiche:<br />
• errore a regime |e r,k |
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• Collegamento con il comportamento a catena chiusa:<br />
€<br />
• errore a regime e precisione nel <strong>sistema</strong> retroazionato<br />
dipendono dal tipo e dal guadagno del term<strong>in</strong>e <strong>in</strong><br />
catena diretta:<br />
tipo<br />
Grad<strong>in</strong>o Rampa Rampa<br />
parabolica<br />
0 1 ∞ ∞<br />
1<br />
1+ L0 (0)<br />
0 1 ∞<br />
2 0<br />
L0 (0)<br />
0 €<br />
1<br />
L0 (0)<br />
€<br />
€<br />
L(s) = L 0 (s)<br />
L 0 (0) guadagno di posizione<br />
L(s) = L0 (s) /s<br />
L<br />
€ 0 (0) guadagno di velocita`<br />
€<br />
€<br />
L(s) = L 0 (s) /s 2<br />
L 0 (0) guad. di accelerazione<br />
7
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• M p nel <strong>sistema</strong> retroazionato e PM di G(s) sono legati<br />
tra loro nel seguente modo: PM cresce ⇔ M p cala<br />
• Infatti: M p elevata ⇒ il <strong>sistema</strong> retroazionato ha poli<br />
vic<strong>in</strong>i all’asse immag<strong>in</strong>ario ⇒ e` “vic<strong>in</strong>o” all’<strong>in</strong>stabilita`<br />
⇒ ha PM piccolo.<br />
• Nella s<strong>in</strong>tesi di Bode si cerca di ottenere una<br />
sovraelongazione soddisfacente agendo su PM<br />
• Legame tra ω c (L(s)) e B (T(s)): per sistemi regolari si<br />
ha che ω c cresce ⇔ B cresce. Assunzione: 0≤PM ≤π/2<br />
8
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• Assunzione: |T(jω)| monotono decrescente nell’<strong>in</strong>torno di<br />
2πB<br />
|T(j0)|/√2<br />
|T(j0)|<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
10 -1 10 0 10 1<br />
0<br />
ω c<br />
|T(jω c )|<br />
|T(j2πB)|<br />
2πB= ω BW<br />
9
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Per sistemi regolari:<br />
S<strong>in</strong>tesi di Bode<br />
ω c ≤2πB ω c ≈5B<br />
• La specifica su ω c corrisponde ad una specifica su B<br />
Specifiche su T(s)<br />
• Errore a regime<br />
• Sovraelongazione<br />
• Banda passante<br />
Specifiche su L(s)=D(s)G(s)<br />
• Tipo+guadagno<br />
• marg<strong>in</strong>e di fase<br />
• pulsazione di attraversamento<br />
Calcolo di D(s)<br />
10
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• Step 1: soddisfacimento della specifica sul tipo e la<br />
precisione<br />
• La specifica e` formulata come |e r,k |
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• Osservazione: se k=0, per K elevato<br />
1€<br />
e r,0 =<br />
1<br />
1+ K<br />
• Poiche` K=K D . KG il valore limite per K D e` dato da<br />
K D =<br />
K G e r,k<br />
• La struttura del regolatore D(s) e` pertanto<br />
€<br />
D(s) = KD s h D<br />
D<br />
* (s)<br />
≈ 1<br />
K<br />
dove D*(s) e` una f.d.t. con guadagno unitario e priva di<br />
poli nell’orig<strong>in</strong>e<br />
€<br />
12
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
S<strong>in</strong>tesi di Bode<br />
• Step 2: soddisfacimento della specifica marg<strong>in</strong>e di fase e<br />
pulsazione di attraversamento<br />
• Si agisce su D*(s), tramite la quale si deve garantire che<br />
€<br />
⎧<br />
⎨<br />
⎩<br />
L( jωc ) =1<br />
[ ] + π = PM<br />
Arg L( jω c )<br />
L(s) = D(s)G(s) = D<br />
€<br />
* (s) KD s h G(s) = D<br />
D<br />
* (s)G * (s)<br />
€<br />
G * (s) = def K D<br />
s h D<br />
G(s)<br />
• G*(s) ha gia` tipo e guadagno corretti<br />
13
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Azioni di controllo<br />
• Con riferimento a G*(s), def<strong>in</strong>iamo:<br />
• ω c 0 : pulsazione di attraversamento effettiva<br />
• ω c : pulsazione di attraversamento richiesta<br />
• PM: marg<strong>in</strong>e di fase richiesto<br />
• PM 0 =π+Arg[G*(j ω c )] (marg<strong>in</strong>e di fase disponibile <strong>in</strong> ω c )<br />
• Osservazione: PM 0 NON co<strong>in</strong>cide con il marg<strong>in</strong>e di fase di<br />
G*(s) che vale π+Arg[G*(j ω c 0 )]<br />
• Osservazione: la specifica su PM e` una disuguaglianza<br />
(come quella su e r,k ), quella su ω c e` una uguaglianza<br />
• Nei problemi: tutte le specifiche considerate come<br />
uguaglianze<br />
14
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
Azioni di controllo<br />
Bode Diagrams<br />
ω c 0 ω c<br />
PM=π+Arg[G*(jω c 0 )] PM 0 =π+Arg[G*(j ω c )] ≠ PM<br />
10<br />
Frequency (rad/sec)<br />
0 10 1<br />
15
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Possibili situazioni:<br />
• ω c > ω c 0 , ωc < ω c 0<br />
• PM > PM 0 , PM < PM 0<br />
Azioni di controllo<br />
• Si agisce tramite D*(s) per imporre che ω c = ω c 0 , PM = PM 0<br />
(o PM > PM 0 )<br />
• In term<strong>in</strong>i analitici:<br />
L( jωc ) = D * ( jωc )G * ( jωc ) =1<br />
Arg[ L( jωc ) ] = Arg D * [ ( jωc ) ] + Arg G * ⎧ ⎪<br />
⎨<br />
⎩ ⎪<br />
[ ( jωc ) ] = mϕ − π<br />
• Scelta della rete corretrice <strong>in</strong> base all’azione elementare di<br />
€ controllo desiderata<br />
16
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso 1: ω c > ω c 0<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
Caso 1: ω c > ω c 0<br />
ω c 0 ω c<br />
• Azione amplificatrice alla pulsazione ω c<br />
• Sul diagramma di Bode dei moduli : traslazione verso<br />
l’alto<br />
ΔK<br />
17
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso 1: ω c > ω c 0<br />
• Determ<strong>in</strong>azione del fattore di amplificazione ΔK:<br />
€<br />
€<br />
L( jω c ) = D * ( jω c )G * ( jω c ) =1 ⇒ M = D * ( jω c ) =<br />
G * ( jω c ) 1<br />
1<br />
ΔKdB = MdB =<br />
G * ⎛ ⎞<br />
⎜ ⎟<br />
⎜<br />
⎝ ( jωc ) ⎟<br />
= −G<br />
⎠ dB<br />
* ( jωc ) > 0<br />
dB<br />
1<br />
G * ( jω c )<br />
18
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso 2: ω c < ω c 0<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
Caso 2: ω c < ω c 0<br />
ω c<br />
ω c 0<br />
• Azione attenuatrice alla pulsazione ω c<br />
• Sul diagramma di Bode dei moduli : traslazione verso il<br />
basso<br />
ΔK<br />
19
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso 2: ω c < ω c 0<br />
• Determ<strong>in</strong>azione del fattore di attenuazione ΔK:<br />
€<br />
€<br />
L( jω c ) = D * ( jω c )G * ( jω c ) =1 ⇒ M = D * ( jω c ) =<br />
G * ( jω c ) >1 ⇒ D * ( jω c ) =<br />
1<br />
G * ( jω c )
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso 3: PM > PM 0<br />
• Caso 3: PM > PM 0 (marg<strong>in</strong>e di fase <strong>in</strong>sufficiente)<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
TextEnd<br />
PM 0<br />
ω c<br />
10 0 10 1<br />
• Azione anticipatrice alla pulsazione ω c<br />
• Sul diagramma di Bode delle fasi : traslazione verso l’alto<br />
ϕ<br />
PM<br />
21
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Caso 3: PM > PM 0<br />
• Determ<strong>in</strong>azione del fattore di anticipo ϕ:<br />
Arg[ L( jωc ) ] + π = PM = Arg D * [ ( jωc ) ] + Arg G * [ ( jωc ) ] + π<br />
PM 0<br />
PM = Arg D * [ ( jωc ) ] + PM 0 ⇒ Arg D * [ ( jωc ) ] = ϕ = PM − PM 0 > 0<br />
€<br />
ϕ = PM − PM 0 = PM − Arg G * ( [ ( jωc ) ] + π)<br />
22
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
TextEnd<br />
Caso 4: PM < PM 0<br />
• Caso 4: PM < PM 0 (marg<strong>in</strong>e di fase sufficiente)<br />
PM<br />
ω c<br />
10 0 10 1<br />
PM 0<br />
• In ω c la G*(s) presenta gia` un marg<strong>in</strong>e di fase superiore a<br />
quello richiesto ⇒ situazione “migliore” di quanto<br />
richiesto nella specifica ⇒ non si operano correzioni di<br />
fase<br />
• ϕ
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Scelta della rete correttrice<br />
• Le caratteristiche della rete correttrice sono determ<strong>in</strong>ate <strong>in</strong><br />
base ai valori di:<br />
M = C * 1<br />
( jωc ) =<br />
G * ( jωc )<br />
ϕ = Arg D * [ ( jωc ) ] = PM − PM 0 = PM − Arg G * ⎧<br />
⎪<br />
⎨<br />
⎪<br />
⎩<br />
( jωc )<br />
• Quattro possibili situazioni:<br />
> <<br />
M M>1 M0 ϕ
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Specifiche su T(s)<br />
• Errore a regime<br />
• Sovraelongazione<br />
• Banda passante<br />
Scelta della rete correttrice<br />
Specifiche su L(s)=D(s)G(s)<br />
• Tipo+guadagno<br />
• marg<strong>in</strong>e di fase<br />
• pulsazione di attraversamento<br />
Calcolo di D(s)<br />
• Tipo+guadagno<br />
• Anticipo/ritardo di fase <strong>in</strong> ω c<br />
• Amplificazione/attenuazione <strong>in</strong> ω c<br />
25
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Scelta della rete correttrice<br />
• Importante: sia M che ϕ sono determ<strong>in</strong>ati <strong>in</strong> base a G*(s)<br />
G * (s) = K D<br />
s h D<br />
G(s)<br />
1<br />
M = €<br />
G * ( jωc ) =<br />
( ωc) hD KD G( jωc )<br />
ϕ = PM − Arg G * ⎧<br />
⎪<br />
⎨<br />
⎪<br />
⎛<br />
( [ ( jωc ) ] + π)<br />
= PM −⎜ Arg[ G( jωc ) ] − hD ⎩ ⎪<br />
⎝<br />
π<br />
2<br />
⎞<br />
+ π⎟<br />
⎠<br />
26
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Struttura del controllore:<br />
Il progetto delle reti corretrici<br />
D(s) = K D<br />
s h D<br />
D * (s)<br />
• Specifica su tipo ed errore a regime ⇒ KD , hD €<br />
• D*(0)=1, D*(s) priva di poli nell’orig<strong>in</strong>e<br />
• Specifiche su ω c e PM ⇒ M, ϕ ⇔ D*(jω c )<br />
• Questa <strong>in</strong>formazione e` sufficiente per determ<strong>in</strong>are<br />
univocamente per via analitica G*(s) se essa ha struttura<br />
semplice<br />
• Analizziamo i quattro casi della tabella (M, ϕ)<br />
27
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso M>1, ϕ1, ϕ ω c 0 (richiesta amplificazione alla pulsazione ωc )<br />
• Compensatore (amplificatore) statico:<br />
• Osservazione: D*(0)≠1<br />
D * ΔK<br />
(s) = M =10 20 >1<br />
• si migliora la € precisione a regime<br />
28
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
|L|<br />
Arg[L]<br />
-π<br />
PM 0<br />
Caso M>1, ϕ
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso M>1, ϕ>0 :<br />
Caso M>1, ϕ>0<br />
• PM > PM 0 (marg<strong>in</strong>e di fase <strong>in</strong>sufficiente)<br />
• ω c > ω c 0 (richiesta amplificazione alla pulsazione ωc )<br />
• Azione amplificatrice per aumentare ω c<br />
• Azione anticipatrice per “guadagnare” PM<br />
• Rete anticipatrice (amplificatrice) (lead)<br />
D * (s) =<br />
1+ Ts<br />
, T > 0, 0 < α
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Magnitude [dB]<br />
Phase [deg]<br />
0<br />
80<br />
60<br />
40<br />
20<br />
0<br />
Frequency [rad/s]<br />
1/T 1/(αT)<br />
φ max<br />
Frequency [rad/s]<br />
ω max<br />
Caso M>1, ϕ>0<br />
€<br />
x o<br />
1/T<br />
1/(αT)<br />
ω >> 1<br />
αT :<br />
D * ( jω) dB ≅ 20log 1<br />
α<br />
φ max < π<br />
2<br />
31
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
ω max<br />
φ max<br />
1 1/α<br />
Caso M>1, ϕ>0<br />
€<br />
€<br />
€<br />
Centro della cfr.:<br />
1+ 1<br />
α 1+ α<br />
=<br />
2 2α<br />
log 1<br />
T<br />
+ log 1<br />
αT<br />
2<br />
⇒ ω max = 1<br />
T α<br />
φ max = arctan 1−α<br />
2 α<br />
= 1 1<br />
log<br />
2 T 2 ⎛ ⎞<br />
⎜ ⎟<br />
⎝ α⎠<br />
⎛ 1 ⎞<br />
= log⎜<br />
⎟<br />
⎝ T α ⎠<br />
32
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Problema di s<strong>in</strong>tesi: dati<br />
Caso M>1, ϕ>0<br />
• ω c , M > 1, ϕ > 0<br />
determ<strong>in</strong>are i parametri α e T di una rete anticipatrice D*(s)<br />
tali che<br />
• |D*(jω c )| = M<br />
• Arg[D*(jω c )]= ϕ<br />
• D*(s) e` completamente specificata dai due parametri α e T<br />
e il problema richiede il soddisfacimento di due<br />
condizioni<br />
• Si possono impostare due equazioni (una dalla condizione<br />
sul modulo, una dalla condizione di fase) nei due<br />
parametri α e T<br />
• Condizioni per l’esistenza di una soluzione<br />
33
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M>1, ϕ>0<br />
• Soluzione: il punto Me jϕ deve appartenere al diagramma di<br />
Nyquist di D* quando ω=ω c<br />
Ms<strong>in</strong>ϕ<br />
Me jϕ<br />
ϕ<br />
0 1 1/α<br />
Mcosϕ<br />
Mcosϕ-1: Ms<strong>in</strong>ϕ= Ms<strong>in</strong>ϕ:1/α- Mcosϕ<br />
34
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M>1, ϕ>0<br />
• Si ottiene un’equazione da risolvere <strong>in</strong> α<br />
M 2 s<strong>in</strong> 2 ϕ = ( M cosϕ −1)<br />
1 ⎛ ⎞<br />
⎜ − M cosϕ⎟<br />
⎝ α ⎠<br />
€<br />
€<br />
α =<br />
M cosϕ −1<br />
M M − cosϕ<br />
( )<br />
• Si impone poi che |D*(jω c )| 2 =M 2<br />
€<br />
T = 1<br />
ω c<br />
1+ T 2 2<br />
ωc 2<br />
1+ α 2 T 2 ω c<br />
1− M 2<br />
α 2 M 2 −1<br />
= M 2<br />
= M − cosϕ<br />
ω c s<strong>in</strong>ϕ<br />
35
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M>1, ϕ>0<br />
• Condizione per l’esistenza di una rete anticipatrice che<br />
risolve il problema: dato che M>1, α > 0 implica che<br />
α =<br />
M cosϕ −1<br />
M M − cosϕ<br />
( )<br />
> 0 ⇒ M cosϕ −1> 0 ⇒<br />
cosϕ > 1<br />
M<br />
• La condizione e` str<strong>in</strong>gente: se non € e` soddisfatta, non<br />
esiste una D*(s) della forma assegnata che risolve il<br />
problema<br />
• Poiche’ M>1, ϕ 0<br />
36
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M>1, ϕ>0<br />
• Si puo` anche determ<strong>in</strong>are α come l’unica soluzione<br />
positiva dell’equazione<br />
c q 2 ( c + c −1)α<br />
2 + 2q 2 cα + q 2 ( +1− c)<br />
= 0<br />
q = tanϕ c = M 2 >1 c > q 2 +1<br />
• Effetti positivi dell’azione anticipatrice:<br />
• miglioramento €<br />
del marg<strong>in</strong>e di stabilita`<br />
• aumento di ωc ⇒ aumento di B a catena chiusa⇒<br />
dim<strong>in</strong>uzione di tr ⇒ <strong>sistema</strong> piu` pronto<br />
• Effetti negativi:<br />
• peggiora la possibilita` di “filtrare” rumore<br />
sovrapposto al segnale utile<br />
37
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Esempio:<br />
• Specifiche:<br />
P(s) =<br />
• tipo h=1, |er,1 |1, ϕ>0<br />
25<br />
s(s + 5)(s +10)<br />
• PM=45 o<br />
• Step 1: specifica su tipo ed errore a regime<br />
• G(s) e` gia` di tipo 1 ⇒ h D =0<br />
• K v =(guadagno di velocita`)=0.5<br />
K D = 1<br />
K v ε =<br />
1<br />
= 20<br />
0.5⋅ 0.1<br />
38
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Caso M>1, ϕ>0<br />
• Step 2: specifiche su ω c e PM<br />
G * (s) = K D<br />
s h D<br />
• Determ<strong>in</strong>azione di M e ϕ:<br />
€<br />
G * ( jωc ) = G * ( j8) = 0.51e<br />
G(s) = 20G(s) =<br />
1<br />
M =<br />
G * ≅ 2 >1<br />
( j8)<br />
ϕ = PM − π + Arg G * ⎧<br />
⎪<br />
⎨<br />
⎪<br />
⎩<br />
( j8)<br />
• Rete anticipatrice<br />
− j186.56<br />
500<br />
s(s + 5)(s +10)<br />
PM 0 =-6 o<br />
[ [ ] ] ≅ 45 −[180 −186 ] = 51 > 0<br />
39
€<br />
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Condizione di esistenza:<br />
M € cosϕ −1<br />
α =<br />
M M − cosϕ<br />
( )<br />
Caso M>1, ϕ>0<br />
cosϕ = 0.63 > 1<br />
M<br />
• Determ<strong>in</strong>azione della rete:<br />
D * (s) =<br />
= 0.078<br />
1+ Ts 1+ 0.21s<br />
=<br />
1+ αTs 1+ 0.016s<br />
€<br />
€<br />
= 0.51<br />
T =<br />
M − cosϕ<br />
= 0.21<br />
ωa s<strong>in</strong>ϕ<br />
1+ 0.21s<br />
D(s) = 20<br />
1+ 0.016s<br />
40
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M>1, ϕ>0<br />
10 0 10 1<br />
Frequency (rad/sec)<br />
41
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
20<br />
15<br />
10<br />
5<br />
0<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
Caso M>1, ϕ>0<br />
Diagrammi di Bode della rete anticipatrice<br />
TextEnd<br />
si “lavora” <strong>in</strong> prossimita` di ω max<br />
10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
42
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-50<br />
-100<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M>1, ϕ>0<br />
Marg<strong>in</strong>i del guadagno di anello<br />
Gm=16.845 dB (at 24.974 rad/sec), Pm=45 deg. (at 8 rad/sec)<br />
10 0 10 1 10 2<br />
Frequency (rad/sec)<br />
43
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Magnitude [dB]<br />
Phase [deg]<br />
10<br />
0<br />
-10<br />
-20<br />
-30<br />
-40<br />
Caso M>1, ϕ>0<br />
10 0 10 1 10 2<br />
-50<br />
13<br />
Frequency [rad/s]<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
10 0 10 1 10 2<br />
-250<br />
Frequency [rad/s]<br />
2πB≈13 ⇒ B ≈2 ⇒ ω c =8 ≈5B ≈ 10<br />
44
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Magnitude [dB]<br />
Phase [deg]<br />
0<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
1/T 1/(αT)<br />
ω m<strong>in</strong><br />
φ m<strong>in</strong><br />
Frequency [rad/s]<br />
Caso M 1<br />
αT :<br />
D * ( jω) dB ≅ 20logα<br />
φ m<strong>in</strong> > − π<br />
2<br />
46
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
α<br />
ω m<strong>in</strong><br />
φ m<strong>in</strong><br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Problema di s<strong>in</strong>tesi: dati<br />
• ω c , M < 1, ϕ < 0<br />
determ<strong>in</strong>are i parametri α e T di una rete attenuatrice D*(s)<br />
tali che<br />
• |D*(jω c )| = M<br />
• Arg[D*(jω c )]= ϕ<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
• Si ottiene:<br />
α =<br />
( )<br />
M cosϕ − M<br />
1− M cosϕ<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Si puo` anche determ<strong>in</strong>are α come l’unica soluzione<br />
positiva dell’equazione<br />
• Effetti positivi dell’azione anticipatrice:<br />
€<br />
• dim<strong>in</strong>uzione di B a catena chiusa ⇒ aumenta l’effetto<br />
“filtrante”<br />
• Effetti negativi:<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Esempio:<br />
• Specifiche:<br />
G(s) =<br />
• tipo h=1, |er,1 |
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Caso M
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Condizione di esistenza:<br />
• Determ<strong>in</strong>azione della rete:<br />
α =<br />
€<br />
M cosϕ − M<br />
1− M cosϕ<br />
G * (s) =<br />
( )<br />
1+ αTs 1+1.27s<br />
=<br />
1+ Ts 1+ 6.14s<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-5<br />
-10<br />
-10<br />
-20<br />
-30<br />
-40<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-5<br />
-10<br />
-15<br />
-20<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
Caso M
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Caso M0 :<br />
Caso M0<br />
• PM > PM 0 (marg<strong>in</strong>e di fase <strong>in</strong>sufficiente)<br />
• ω c < ω c 0 (richiesta attenuazione alla pulsazione ωc )<br />
• Azione attenuatrice per dim<strong>in</strong>uire ω c ed anticipatrice per<br />
“guadagnare” <strong>in</strong> PM<br />
• Rete piu` complessa (due poli e due zeri)<br />
• Rete a sella (attenuatrice-anticipatrice) (lead-lag)<br />
D * (s) = 1+ αT 1 s<br />
1+ T 1 s<br />
1+ T 2 s<br />
1+ αT 2 s T 1 > T 2<br />
> 0, 0 < α
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Ga<strong>in</strong> dB<br />
Phase deg<br />
0<br />
90<br />
60<br />
30<br />
0<br />
-30<br />
-60<br />
-90<br />
Frequency (rad/sec)<br />
Caso M0<br />
1/T1 1/(αT1 ) 1/T2 1/(αT2 )<br />
€<br />
1/(T 1 )<br />
x o o x<br />
1/αT 2<br />
1/(T 2 )<br />
1/αT 1<br />
media ω poli =media ω zeri<br />
φ = 0 : ω m =<br />
− π<br />
2 < φ m<strong>in</strong> < φ < φ max<br />
1<br />
αT 1 T 2<br />
< π<br />
2<br />
59
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
0<br />
ω max<br />
ω m<br />
m<br />
ω m<strong>in</strong><br />
φ max<br />
φ m<strong>in</strong><br />
Caso M0<br />
€<br />
1<br />
Centro della cfr.: (1+m)/2<br />
m = D * ( jω m ) =<br />
k = T 1<br />
T 2<br />
1+ αk<br />
α + k<br />
>1; 0 < m
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Problema di s<strong>in</strong>tesi: dati<br />
Caso M0<br />
• ω c , M < 1, ϕ > 0<br />
determ<strong>in</strong>are i parametri α e T 1 , T 2 di una rete a sella D*(s)<br />
tali che<br />
• |D*(jω c )| = M<br />
• Arg[D*(jω c )]= ϕ<br />
• Come nei casi precedenti, si possono impostare due<br />
equazioni (una dalla condizione sul modulo, una dalla<br />
condizione di fase) che non consentono di determ<strong>in</strong>are<br />
univocamente α e T 1 , T 2<br />
• Si determ<strong>in</strong>a una famiglia di soluzioni<br />
• Condizioni per l’esistenza di soluzioni<br />
61
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M0<br />
• Primo approccio: si determ<strong>in</strong>a una famiglia di soluzioni <strong>in</strong><br />
funzione del parametro k = T 1 /T 2<br />
• Passi della procedura:<br />
• imponendo il passaggio del diagramma di Nyquist per<br />
il punto Me jϕ si determ<strong>in</strong>a m<br />
• si fissa k<br />
• noti m e k, si calcola<br />
α =<br />
km −1<br />
k − m<br />
• imponendo la condizione di modulo |C*(jωa )|=M si<br />
determ<strong>in</strong>a T2 €<br />
• si calcola T 1 =k T 2<br />
• Per ogni scelta di k si ottiene una rete<br />
62
€<br />
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Caso M0<br />
• Le formule che si ottengono sono le seguenti (applicando<br />
nell’ord<strong>in</strong>e i passi della procedura):<br />
α =<br />
m =<br />
M(cosϕ − M)<br />
1− M cosϕ<br />
km −1<br />
k − m<br />
x = C + C 2 − 4α 2 k 2<br />
2α 2 k 2<br />
T 2 = x<br />
ω a<br />
M < cosϕ<br />
k arbitrario purche’<br />
T 1 = kT 2<br />
C = M 2 α 2 + k 2<br />
( ) −1−α 2 k 2<br />
€<br />
condizione str<strong>in</strong>gente<br />
di esistenza<br />
k > 1<br />
m<br />
1− M 2<br />
63
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Esempio:<br />
• Specifiche:<br />
G(s) =<br />
Caso M0<br />
• tipo h=1, |er,1 |
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
€<br />
Caso M0<br />
• Step 2: specifiche su ω c e PM<br />
G * (s) = K D<br />
s h D<br />
• Determ<strong>in</strong>azione di M e ϕ:<br />
€<br />
G * ( jωc ) = G * ( j5) =12.65e<br />
G(s) = 200G(s) =<br />
1<br />
M =<br />
G * ≅ 0.08 0<br />
65
€<br />
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Condizione di esistenza:<br />
• Determ<strong>in</strong>azione della rete:<br />
m =<br />
€<br />
M(cosϕ − M)<br />
= 0.053<br />
1− M cosϕ<br />
D * (s) = 1+ αT 1 s<br />
1+ T 1 s<br />
Caso M0<br />
cosϕ = 0.7125 > M = 0.08<br />
1+ T 2 s<br />
1+ αT 2 s<br />
k = 20 > 1<br />
m =18.94<br />
1+ 0.003⋅ 79.82s 1+ 3.99s<br />
= €<br />
1+ 79.82s 1+ 0.003⋅ 3.99s<br />
66
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M0<br />
Bode Diagrams<br />
10 -1 10 0 10 1 10 2<br />
Frequency (rad/sec)<br />
67
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-5<br />
-10<br />
-15<br />
-20<br />
-25<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
Caso M0<br />
Bode Diagrams<br />
10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
68
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M0<br />
TextEnd<br />
Bode Diagrams<br />
Gm=24.003 dB (at 29.269 rad/sec), Pm=60 deg. (at 5 rad/sec)<br />
10 -2 10 0 10 2<br />
Frequency (rad/sec)<br />
69
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M0<br />
Bode Diagrams<br />
10 -1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
2πB≈8.5 ⇒ B ≈1.35 ⇒ ω c =5 ≈5B ≈ 6.78<br />
70
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-5<br />
-10<br />
-15<br />
-20<br />
-25<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
Caso M0<br />
Bode Diagrams<br />
10 -4 10 -3 10 -2 10 -1 10 0 10 1 10 2<br />
Frequency (rad/sec)<br />
71
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-120<br />
-140<br />
-160<br />
-180<br />
-200<br />
-220<br />
Caso M0<br />
Bode Diagrams<br />
10 -4 10 -3 10 -2 10 -1 10 0 10 1 10 2<br />
Frequency (rad/sec)<br />
72
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
Caso M0<br />
Bode Diagrams<br />
10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
73
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M0<br />
• Secondo approccio: si scompone il problema di s<strong>in</strong>tesi <strong>in</strong><br />
due sottoproblemi.<br />
• s<strong>in</strong>tesi della parte attenuatrice-ritardatrice D* r (s) e s<strong>in</strong>tesi<br />
della parte anticipatrice D* a (s)<br />
• D*(s)= D* r (s) D* a (s)<br />
• Si decide a priori il contributo di fase negativa (ritardo) φ r<br />
<strong>in</strong>trodotto <strong>in</strong> ω c da D* r (s)<br />
• La pulsazione ω c si deve collocare dove φ r e` piccolo (<strong>in</strong><br />
genere -6 o < φ r
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M0<br />
• Parte attenuatrice-ritardatrice D* r (s):<br />
⎧<br />
⎪<br />
⎨<br />
⎪<br />
⎩<br />
*<br />
Dr ( jωc ) =<br />
dB 1+ jωcαT1 1+ jω c T 1 dB<br />
Arg[ *<br />
Dr ( jωc ) ] = φr ≅ 20logα<br />
MdB = D<br />
€<br />
• Parte anticipatrice C* a (s):<br />
€<br />
* * *<br />
( jωc ) = D<br />
dB<br />
r ( jωc ) + D<br />
dB<br />
a(<br />
jωc )<br />
dB<br />
* *<br />
Da( jωc ) = 20log M − 20logα ⇒ D<br />
dB<br />
a(<br />
jωc ) = M<br />
⎧<br />
⎪<br />
⎨<br />
α<br />
*<br />
⎩<br />
⎪<br />
Arg[ Da( jωc ) ] = ϕ − φr • Si risolve per α e T 2 con la tecnica vista per le reti anticip.<br />
75
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Caso M0<br />
• Condizione per l’esistenza della soluzione D* a (s):<br />
M 2 < 1<br />
1+ q 2<br />
q = tan(ϕ − φ r )<br />
• Parte anticipatrice D* r (s): rimane da determ<strong>in</strong>are T1 €<br />
Arg[ *<br />
Cr ( jωc ) ] = φr = Arg 1+ jω ⎡<br />
cαT ⎤<br />
1<br />
⎢ ⎥ = arctan<br />
⎣ 1+ jωcT1 ⎦<br />
ωcT ⎡<br />
1 (α −1) ⎤<br />
⎢ 2 2 ⎥<br />
⎣ 1+ αωcT1 ⎦<br />
€<br />
€<br />
tanφ r = ωcT1 (α −1)<br />
2 2<br />
1+ αωcT1 2<br />
T (<br />
2<br />
) 1 αωc tanφr + (1−α)ω cT1 + tanφ r = 0<br />
Condizione:<br />
deve esistere<br />
T 1 > T 2 >0<br />
76
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
Phase (deg); Magnitude (dB)<br />
0<br />
-5<br />
-10<br />
-15<br />
-20<br />
-25<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
-60<br />
Caso M0<br />
Diagrammi di Bode delle reti a sella<br />
10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
77
A. Beghi “Fondamenti di Controlli Automatici” Universita` di Padova<br />
• Osservazioni generali:<br />
Conclusioni<br />
• una volta determ<strong>in</strong>ato D(s), e` necessario verificare che<br />
il <strong>sistema</strong> <strong>in</strong> catena chiusa sia stabile<br />
• talvolta non si riesce a soddisfare le specifiche<br />
utilizzando una sola rete correttrice ⇒ cascata di piu`<br />
reti<br />
• possono essere necessari, a posteriori, piccoli<br />
aggiustamenti dei parametri per soddisfare le<br />
specifiche di progetto<br />
78














