

UNIVERSITÀ DEGLI STUDI DI PARMA Studio e applicazione di ...
UNIVERSITÀ DEGLI STUDI DI PARMA Studio e applicazione di ...
UNIVERSITÀ DEGLI STUDI DI PARMA Studio e applicazione di ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
36 Capitolo 2. Ricostruzione 3D su immagini IPM<br />
2.1 Inverse Perspective Mapping<br />
Per introdurre la trasformata <strong>di</strong> Inverse Perspective Mapping è opportuno partire dalla<br />
funzione in forma esplicita della proiezione della pin-hole camera:<br />
⎛<br />
⎞<br />
r 1 (X − X 0 ) + r 2 (Y −Y 0 ) + r 3 (Z − Z 0 )<br />
k u<br />
F pm (X,Y,Z) = ⎜ r 7 (X − X 0 ) + r 8 (Y −Y 0 ) + r 9 (Z − Z 0 ) + u 0<br />
⎟<br />
⎝ r 4 (X − X 0 ) + r 5 (Y −Y 0 ) + r 6 (Z − Z 0 )<br />
k v<br />
r 7 (X − X 0 ) + r 8 (Y −Y 0 ) + r 9 (Z − Z 0 ) + v ⎠ (2.1)<br />
0<br />
dove (X,Y,Z) T è un generico punto in coor<strong>di</strong>nate mondo, (u 0 ,v 0 ) è il principal point<br />
e (k u ,k v ) la <strong>di</strong>stanza focale in pixel. Tale funzione proietta punti da uno spazio <strong>di</strong><br />
R 3 in uno spazio R 2 e per questo motivo non è <strong>di</strong>rettamente invertibile. Se tuttavia<br />
viene fissata una delle 3 componenti (X,Y,Z) la funzione <strong>di</strong>venta <strong>di</strong> R 2 e risulta<br />
invertibile. Si definisce l’immagine IPM come l’immagine rappresentante per ogni<br />
suo punto (X,Y ) la rispettiva coor<strong>di</strong>nata mondo e a cui è associata a tutta l’immagine<br />
una coor<strong>di</strong>nata Z costante.<br />
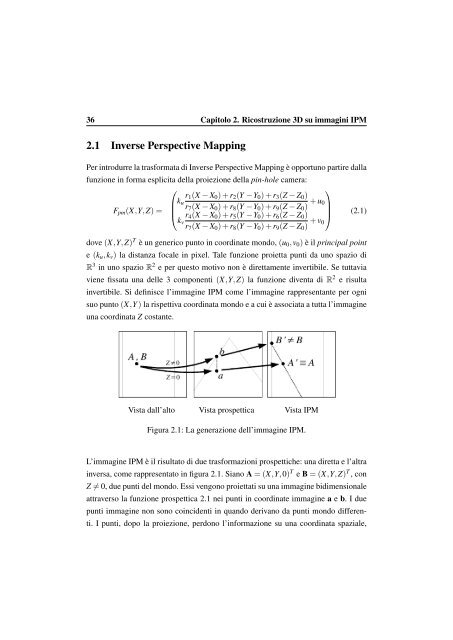
Vista dall’alto Vista prospettica Vista IPM<br />
Figura 2.1: La generazione dell’immagine IPM.<br />
L’immagine IPM è il risultato <strong>di</strong> due trasformazioni prospettiche: una <strong>di</strong>retta e l’altra<br />
inversa, come rappresentato in figura 2.1. Siano A = (X,Y,0) T e B = (X,Y,Z) T , con<br />
Z ≠ 0, due punti del mondo. Essi vengono proiettati su una immagine bi<strong>di</strong>mensionale<br />
attraverso la funzione prospettica 2.1 nei punti in coor<strong>di</strong>nate immagine a e b. I due<br />
punti immagine non sono coincidenti in quando derivano da punti mondo <strong>di</strong>fferenti.<br />
I punti, dopo la proiezione, perdono l’informazione su una coor<strong>di</strong>nata spaziale,













