OPTIMALISATIE IN INVENTOR - CAD College
OPTIMALISATIE IN INVENTOR - CAD College
OPTIMALISATIE IN INVENTOR - CAD College

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
- Optimalisatie in Inventor -<br />
6. Steepest-Descent methode<br />
Doordat de halveringsmethode en de kwadratische interpolatie beperkt zijn tot het variëren van één<br />
variabele is er verder gekeken naar technieken waarbij wel meerdere parameters geoptimaliseerd<br />
kunnen worden. Zo gauw er meerdere parameters geoptimaliseerd moeten worden is er geen sprake<br />
meer van een 2D grafiek, maar gaat het om een 3 dimensionaal probleem. De eerste<br />
optimalisatietechniek, waarbij meerdere parameters geoptimaliseerd worden, die in het boek van<br />
Daniels [3] besproken wordt is de Steepest-Descent methode. De Steepest-Descent methode zoekt naar<br />
het minimum van een functie door middel van de gradiënt.<br />
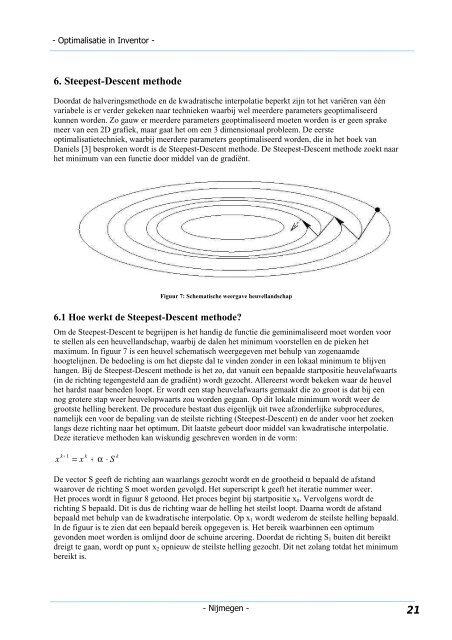
Figuur 7: Schematische weergave heuvellandschap<br />
6.1 Hoe werkt de Steepest-Descent methode?<br />
Om de Steepest-Descent te begrijpen is het handig de functie die geminimaliseerd moet worden voor<br />
te stellen als een heuvellandschap, waarbij de dalen het minimum voorstellen en de pieken het<br />
maximum. In figuur 7 is een heuvel schematisch weergegeven met behulp van zogenaamde<br />
hoogtelijnen. De bedoeling is om het diepste dal te vinden zonder in een lokaal minimum te blijven<br />
hangen. Bij de Steepest-Descent methode is het zo, dat vanuit een bepaalde startpositie heuvelafwaarts<br />
(in de richting tegengesteld aan de gradiënt) wordt gezocht. Allereerst wordt bekeken waar de heuvel<br />
het hardst naar beneden loopt. Er wordt een stap heuvelafwaarts gemaakt die zo groot is dat bij een<br />
nog grotere stap weer heuvelopwaarts zou worden gegaan. Op dit lokale minimum wordt weer de<br />
grootste helling berekent. De procedure bestaat dus eigenlijk uit twee afzonderlijke subprocedures,<br />
namelijk een voor de bepaling van de steilste richting (Steepest-Descent) en de ander voor het zoeken<br />
langs deze richting naar het optimum. Dit laatste gebeurt door middel van kwadratische interpolatie.<br />
Deze iteratieve methoden kan wiskundig geschreven worden in de vorm:<br />
k+<br />
1 k<br />
x = x + α ⋅<br />
S<br />
k<br />
De vector S geeft de richting aan waarlangs gezocht wordt en de grootheid α bepaald de afstand<br />
waarover de richting S moet worden gevolgd. Het superscript k geeft het iteratie nummer weer.<br />
Het proces wordt in figuur 8 getoond. Het proces begint bij startpositie x0. Vervolgens wordt de<br />
richting S bepaald. Dit is dus de richting waar de helling het steilst loopt. Daarna wordt de afstand<br />
bepaald met behulp van de kwadratische interpolatie. Op x1 wordt wederom de steilste helling bepaald.<br />
In de figuur is te zien dat een bepaald bereik opgegeven is. Het bereik waarbinnen een optimum<br />
gevonden moet worden is omlijnd door de schuine arcering. Doordat de richting S1 buiten dit bereikt<br />
dreigt te gaan, wordt op punt x2 opnieuw de steilste helling gezocht. Dit net zolang totdat het minimum<br />
bereikt is.<br />
- Nijmegen - 21