med løsning - TechTeach
med løsning - TechTeach
med løsning - TechTeach

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Finn Haugen. Oppgaver i reguleringsteknikk 1<br />
Oppgave 0.1 Hvilke variable skal reguleres<br />
Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i<br />
industrianlegg.<br />
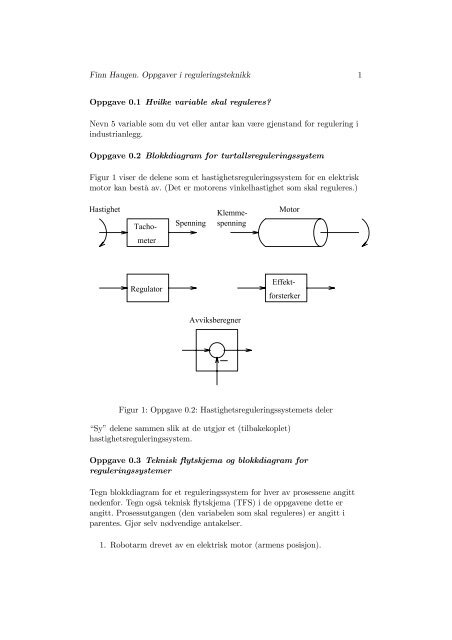
Oppgave 0.2 Blokkdiagram for turtallsreguleringssystem<br />
Figur 1 viser de delene som et hastighetsreguleringssystem for en elektrisk<br />
motor kan bestå av. (Det er motorens vinkelhastighet som skal reguleres.)<br />
Hastighet<br />
Spenning<br />
Tacho-<br />
Klemmespenning<br />
Motor<br />
meter<br />
Regulator<br />
Effektforsterker<br />
Avviksberegner<br />
Figur 1: Oppgave 0.2: Hastighetsreguleringssystemets deler<br />
“Sy” delene sammen slik at de utgjør et (tilbakekoplet)<br />
hastighetsreguleringssystem.<br />
Oppgave 0.3 Teknisk flytskjema og blokkdiagram for<br />
reguleringssystemer<br />
Tegn blokkdiagram for et reguleringssystem for hver av prosessene angitt<br />
nedenfor. Tegn også teknisk flytskjema (TFS) i de oppgavene dette er<br />
angitt. Prosessutgangen (den variabelen som skal reguleres) er angitt i<br />
parentes. Gjør selv nødvendige antakelser.<br />
1. Robotarm drevet av en elektrisk motor (armens posisjon).
Finn Haugen. Oppgaver i reguleringsteknikk 2<br />
2. Varmeveksler der produktet skal varmes opp av damp (bruk<br />
instrumenteringssymboler vist i vedlegg A i læreboken).<br />
3. Undervisning (studenters kunnskaper, holdninger og ferdigheter).<br />
Tegn kun blokkdiagram.<br />
Oppgave 0.4 Fra PB til K p<br />
Det er oppgitt at en regulator er innstilt <strong>med</strong> proporsjonalbånd lik 250%.<br />
Hva er verdien av regulatorens forsterkning K p <br />
Oppgave 0.5 Statisk ytelse for temperaturreguleringssystem<br />
Figur 2 viser et varmluftrør. En vifte <strong>med</strong> konstant hastighet blåser luft<br />
Figur 2: Oppgave 0.5: Varmluftrør. (Process Trainer PT 326, Feedback Systems)<br />
gjennom røret. Spjeldåpningen kan varieres manuelt. Luften varmes opp av<br />
et heteelement. Prosessens pådrag u er spenningssignalet som styrer<br />
effekten tilført heteelementet. Temperaturen måles <strong>med</strong> en termistor, som<br />
er en varmefølsom motstand. Som regulatoren kan man benytte den
Finn Haugen. Oppgaver i reguleringsteknikk 3<br />
interne (analoge) regulatoren på selve prosessboksen eller man kan kople<br />
en ekstern regulator til bøssingene for “pådrag” og “målesignal”.<br />
Figur 3 viser responsen i temperaturen y etter et sprang i referansen og<br />
etter et sprang i spjeldåpningen, som vi kan betrakte som en<br />
forstyrrelsesendring. I dette eksperimentet er det ikke brukt regulering <strong>med</strong><br />
Figur 3: Oppgave 0.5: Responsen i temperaturen y etter et sprang i referansen<br />
r og et sprang i spjeldåpningen. Prosessen styres <strong>med</strong> fast pådrag<br />
(uten tilbakekopling).<br />
tilbakekopling. I stedet består pådraget kun av pådragsbiasen u 0 som er<br />
manuelt innstilt slik at det initielt er tilnærmet null reguleringsavvik. u 0<br />
holdes konstant.<br />
1. Tegn et blokkdiagram av reguleringssystemet.<br />
2. Forklar hvorfor det ikke er noen respons i y etter spranget i<br />
referansen i eksperimentet beskrevet ovenfor. Og hvorfor er det en<br />
respons etter spranget i spjeldåpningen<br />
3. Anta at temperaturen reguleres <strong>med</strong> en P-regulator. Skisser den<br />
prinsipielle responsen i y etter sprang i referansen og i<br />
spjeldåpningen. (Hint: Det nominelle pådraget har ikke en korrekt<br />
verdi etter spranget i temperaturreferansen, og heller ikke etter<br />
spranget i spjeldåpningen/forstyrrelsen. Hva blir da det statiske<br />
reguleringsavviket)
Finn Haugen. Oppgaver i reguleringsteknikk 4<br />
4. Som i deloppgave 3, men la nå regulatoren være en PID-regulator.<br />
Oppgave 0.6 Ziegler-Nichols’ lukket sløyfe-metode<br />
En prosess skal reguleres ved hjelp av tilbakekopling og PID-regulator.<br />
Figur 4 viser de stående svingningene i prosessmålingen ved<br />
Ziegler-Nichols’ lukket-sløyfe-metode. Regulatorforsterkningen er da<br />
Figur 4: Oppgave 0.6: Stående svingninger ved Ziegler-Nichols’ lukket-sløyfemetode<br />
K p =2, 0.<br />
Finn parametrene i PID-regulatoren ut fra Ziegler-Nichols’<br />
lukket-sløyfe-metode.
Finn Haugen. Oppgaver i reguleringsteknikk 5<br />
Løsninger<br />
Løsning 0.1<br />
• Trykk<br />
• Temperatur<br />
• Nivå<br />
• Kvalitet (gjerne i form av konsentrasjon)<br />
• Turtall (rotasjonshastighet)<br />
Løsning 0.2<br />
Figur 5 viser hastighetsreguleringssystemet.<br />
Referanse<br />
Regulator<br />
Motor<br />
Malt<br />
hastighet<br />
Effektforsterker<br />
Tachometer<br />
Figur 5: Løsning 0.2: Komponent-blokkdiagram for hastighetsreguleringssystemet<br />
Løsning 0.3<br />
1. Robotarm: Se figur 6.<br />
2. Varmeveksler: Se figur 7.<br />
3. Forelesninger: Se figur 8.<br />
Løsning 0.4<br />
Løsning 0.5<br />
K p = 100<br />
PB = 100 =0, 4 (1)<br />
250<br />
1. Blokkdiagrammet er vist i figur 9.
Finn Haugen. Oppgaver i reguleringsteknikk 6<br />
Lastmomenter<br />
Verktøy<br />
Robotarm<br />
Gir<br />
Motor<br />
Posisjon<br />
GT<br />
GC<br />
Lastmomenter<br />
Posisjonsreferanse<br />
Reg.<br />
GC<br />
Pådrag<br />
Robotarm<br />
<strong>med</strong> gir<br />
og motor<br />
Posisjon<br />
Posisjonsmåler<br />
GT<br />
Figur 6: Løsning 0.3: Posisjonsservo for motor<br />
2. Siden u 0 , som er konstant, ikke påvirkes av referansen, blir pådraget<br />
konstant, og referansen kan da ikke påvirke temperaturen. Endringen<br />
(økningen) av spjeldåpningen derimot vil påvirke temperaturen da<br />
det <strong>med</strong> økt åpning slippes inn mer kald luft slik at temperaturen<br />
synker.<br />
3. P-regulatoren reduserer det statiske avviket sammenliknet <strong>med</strong> åpen<br />
sløyfe-regulering, men avviket blir forskjellig fra null, se figur 10.<br />
4. PID-regulatoren gir null statisk (midlere) avvik, se figur 11.<br />
Løsning 0.6<br />
Kritisk forsterkning er K pk =2, 0. Avlesning i figur4viseratkritisk<br />
periode T p er ca. 6,3 sek. PID-parametrene blir da som følger (jf. tabell 4.1<br />
side 97 i læreboka):<br />
K p = 0, 6K pk =1, 2 (2)<br />
T i = T p<br />
2<br />
T d = T p<br />
8<br />
=3, 15s (3)<br />
=0, 79s (4)
Finn Haugen. Oppgaver i reguleringsteknikk 7<br />
Produkt<br />
TT<br />
TC<br />
Damp<br />
Produktets<br />
innløpstemperatur<br />
Temperaturreferanse<br />
Reg.<br />
Pådrag<br />
Varmeveksler<br />
Produktets<br />
utløpstemperatur<br />
TC<br />
Temperaturmåler<br />
GT<br />
Figur 7: Løsning 0.3: Regulert varmeveksler<br />
Ønsket utbytte<br />
av undervisningen<br />
mhp. kunnskaper,<br />
holdninger og<br />
ferdigheter<br />
Lærer<br />
Pedagogiske<br />
virkemidler<br />
Studentenes<br />
forkunnskaper<br />
og motivasjon<br />
Student<br />
Studentenes<br />
kunnskaper,<br />
holdninger og<br />
ferdigheter<br />
Evaluering<br />
(f.eks.<br />
eksamen)<br />
Figur 8: Løsning 0.3: Regulering av undervisningsprosessen
Finn Haugen. Oppgaver i reguleringsteknikk 8<br />
Spjeldåpning<br />
(forstyrrelse)<br />
y r<br />
Temp.-<br />
referanse<br />
Reg.<br />
u<br />
Pådrag<br />
Varmluftrør<br />
(prosess)<br />
y<br />
Temp.<br />
Temp.-<br />
måler<br />
Figur 9: Løsning 0.5: Blokkdiagram av temperaturreguleringssystem<br />
Figur 10: Løsning 0.5: Responsen i temperaturen y <strong>med</strong> P-regulator<br />
Figur 11: Løsning 0.5: Responsen i temperaturen y <strong>med</strong> PID-regulator