edição 7
Esta edição marca a primeira etapa da Fenibat. Os espaços foram vendidos, organização do evento está toda definida e concretizada. No site estão disponíveis todas relativas a este evento inclusive as palestras e mesa redonda. Também teremos como matérias variadas sobre o tema da revista.
Esta edição marca a primeira etapa da Fenibat. Os espaços foram vendidos, organização do evento está toda definida e concretizada. No site estão disponíveis todas relativas a este evento inclusive as palestras e mesa redonda. Também teremos como matérias variadas sobre o tema da revista.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Tecnologia<br />
so do processo. Uma célula de trabalho bem elaborada<br />
deve fazer parte do planejamento nos primeiros passos<br />
de desenvolvimento da aplicação - entenda-se como célula<br />
de trabalho os equipamentos periféricos necessários<br />
para operação do robô, ou seja, um robô aplicador de<br />
tampas em uma linha de baterias, por exemplo, necessita<br />
de um sistema auxiliar composto por esteiras para<br />
transportar as baterias abertas até a área de atuação do<br />
robô. Também deve ser considerado um sistema auxiliar<br />
para fornecer os elementos para que o robô possa operar<br />
e sensores para verificação desses elementos (tampas<br />
presentes, baterias posicionadas, etc.). Deste modo, uma<br />
célula robotizada é composta não somente pelo robô,<br />
mas sim por uma serie de equipamentos interligados que<br />
juntos garantem a eficiência do sistema.<br />
É comum nos depararmos com empresas que possuem<br />
uma célula de trabalho deficiente. Nosso trabalho<br />
demanda, em grande parte, a idealização<br />
e melhoria destas células, integrando<br />
soluções customizadas para utilização<br />
eficiente dos recursos instalados no<br />
processo.<br />
that together guarantee the system’s efficiency.<br />
It is usual for us to run across companies with a deficient<br />
work cell. Our job demands the idealization and<br />
improvement of these cells, integrating customized solutions<br />
for an efficient utilization of the resources installed<br />
in the process.<br />
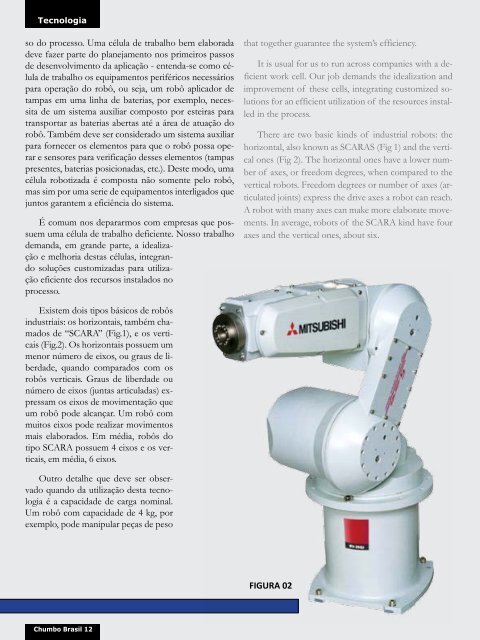
There are two basic kinds of industrial robots: the<br />
horizontal, also known as SCARAS (Fig 1) and the vertical<br />
ones (Fig 2). The horizontal ones have a lower number<br />
of axes, or freedom degrees, when compared to the<br />
vertical robots. Freedom degrees or number of axes (articulated<br />
joints) express the drive axes a robot can reach.<br />
A robot with many axes can make more elaborate movements.<br />
In average, robots of the SCARA kind have four<br />
axes and the vertical ones, about six.<br />
Existem dois tipos básicos de robôs<br />
industriais: os horizontais, também chamados<br />
de “SCARA” (Fig.1), e os verticais<br />
(Fig.2). Os horizontais possuem um<br />
menor número de eixos, ou graus de liberdade,<br />
quando comparados com os<br />
robôs verticais. Graus de liberdade ou<br />
número de eixos (juntas articuladas) expressam<br />
os eixos de movimentação que<br />
um robô pode alcançar. Um robô com<br />
muitos eixos pode realizar movimentos<br />
mais elaborados. Em média, robôs do<br />
tipo SCARA possuem 4 eixos e os verticais,<br />
em média, 6 eixos.<br />
Outro detalhe que deve ser observado<br />
quando da utilização desta tecnologia<br />
é a capacidade de carga nominal.<br />
Um robô com capacidade de 4 kg, por<br />
exemplo, pode manipular peças de peso<br />
FIGURA 02<br />
Chumbo Brasil 12