Relatório de Progresso - Faculdade de Engenharia da Universidade ...
Relatório de Progresso - Faculdade de Engenharia da Universidade ...
Relatório de Progresso - Faculdade de Engenharia da Universidade ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Relatório</strong> <strong>de</strong> <strong>Progresso</strong> - PD 77 –<br />
Placa <strong>de</strong> aquisição <strong>de</strong> imagem -Frame grabber.<br />
Computador para aquisição e tratamento <strong>da</strong> informação adquiri<strong>da</strong> pelas câmaras.<br />
Alvo para colocar no paciente <strong>de</strong> modo a <strong>de</strong>tectar um <strong>de</strong>terminado tipo <strong>de</strong> padrão<br />
associado aos movimentos do paciente, bem como alvo <strong>de</strong> calibração.<br />
Equipamento <strong>de</strong> alimentação <strong>da</strong>s câmaras e <strong>de</strong> conexão <strong>da</strong>s câmaras à placa <strong>de</strong><br />
aquisição.<br />
4.Análise <strong>da</strong> estrutura a seguir para criação <strong>da</strong> aplicação <strong>de</strong> interface<br />
A análise dos fins a que se propõe o projecto levou-nos a <strong>de</strong>cidir que a aplicação <strong>de</strong><br />
interface a <strong>de</strong>senvolver será basea<strong>da</strong> no seguinte esquema modular:<br />
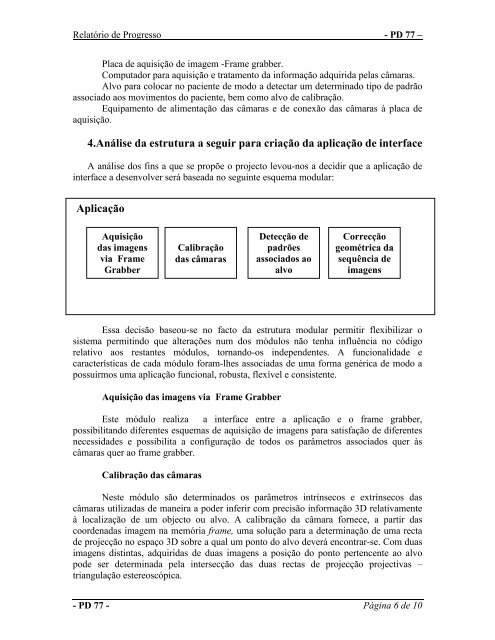
Aplicação<br />
Aquisição<br />
<strong>da</strong>s imagens<br />
via Frame<br />
Grabber<br />
Calibração<br />
<strong>da</strong>s câmaras<br />
Essa <strong>de</strong>cisão baseou-se no facto <strong>da</strong> estrutura modular permitir flexibilizar o<br />
sistema permitindo que alterações num dos módulos não tenha influência no código<br />
relativo aos restantes módulos, tornando-os in<strong>de</strong>pen<strong>de</strong>ntes. A funcionali<strong>da</strong><strong>de</strong> e<br />
características <strong>de</strong> ca<strong>da</strong> módulo foram-lhes associa<strong>da</strong>s <strong>de</strong> uma forma genérica <strong>de</strong> modo a<br />
possuirmos uma aplicação funcional, robusta, flexível e consistente.<br />
Aquisição <strong>da</strong>s imagens via Frame Grabber<br />
Este módulo realiza a interface entre a aplicação e o frame grabber,<br />
possibilitando diferentes esquemas <strong>de</strong> aquisição <strong>de</strong> imagens para satisfação <strong>de</strong> diferentes<br />
necessi<strong>da</strong><strong>de</strong>s e possibilita a configuração <strong>de</strong> todos os parâmetros associados quer às<br />
câmaras quer ao frame grabber.<br />
Calibração <strong>da</strong>s câmaras<br />
Detecção <strong>de</strong><br />
padrões<br />
associados ao<br />
alvo<br />
Correcção<br />
geométrica <strong>da</strong><br />
sequência <strong>de</strong><br />
imagens<br />
Neste módulo são <strong>de</strong>terminados os parâmetros intrínsecos e extrínsecos <strong>da</strong>s<br />
câmaras utiliza<strong>da</strong>s <strong>de</strong> maneira a po<strong>de</strong>r inferir com precisão informação 3D relativamente<br />
à localização <strong>de</strong> um objecto ou alvo. A calibração <strong>da</strong> câmara fornece, a partir <strong>da</strong>s<br />
coor<strong>de</strong>na<strong>da</strong>s imagem na memória frame, uma solução para a <strong>de</strong>terminação <strong>de</strong> uma recta<br />
<strong>de</strong> projecção no espaço 3D sobre a qual um ponto do alvo <strong>de</strong>verá encontrar-se. Com duas<br />
imagens distintas, adquiri<strong>da</strong>s <strong>de</strong> duas imagens a posição do ponto pertencente ao alvo<br />
po<strong>de</strong> ser <strong>de</strong>termina<strong>da</strong> pela intersecção <strong>da</strong>s duas rectas <strong>de</strong> projecção projectivas –<br />
triangulação estereoscópica.<br />
- PD 77 - Página 6 <strong>de</strong> 10