Relatório de Progresso - Faculdade de Engenharia da Universidade ...
Relatório de Progresso - Faculdade de Engenharia da Universidade ...
Relatório de Progresso - Faculdade de Engenharia da Universidade ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Relatório</strong> <strong>de</strong> <strong>Progresso</strong> - PD 77 –<br />
características serão completamente <strong>de</strong>scritas no relatório final sob a forma <strong>de</strong> um guia <strong>de</strong><br />
utilização <strong>da</strong> aplicação).<br />
Além disso é possível <strong>de</strong>finir as características associa<strong>da</strong>s às imagens adquiri<strong>da</strong>s, pelo<br />
frame grabber, a<strong>da</strong>ptando-se assim às condições <strong>de</strong> utilização do sistema.<br />
Todo este módulo foi implementado <strong>de</strong> modo a satisfazer as necessi<strong>da</strong><strong>de</strong>s do projecto<br />
e também ser utilizado in<strong>de</strong>pen<strong>de</strong>ntemente para simples aquisições <strong>de</strong> imagem.<br />
Calibração do sistema.<br />
O método <strong>de</strong> calibração coplanar concebido e implementado foi baseado no proposto<br />
em [Tsai, 1987]; <strong>de</strong>ste modo utiliza o mesmo mo<strong>de</strong>lo para a câmara, um setup<br />
experimental idêntico e, <strong>da</strong> mesma forma, um conjunto <strong>de</strong> pontos <strong>de</strong> calibração<br />
coplanares.<br />
O processo <strong>de</strong> calibração global é constituído pelas seguintes três etapas:<br />
1- Determinação do factor <strong>de</strong> incerteza horizontal s x ;<br />
2- Determinação <strong>da</strong>s coor<strong>de</strong>na<strong>da</strong>s do centro <strong>da</strong> imagem na memória<br />
frame x C e C y ;<br />
3- Determinação dos restantes parâmetros <strong>de</strong> calibração,<br />
nomea<strong>da</strong>mente <strong>da</strong> matriz <strong>de</strong> rotação 3D R, do vector <strong>de</strong> translação 3D T, <strong>da</strong><br />
distância focal efectiva f e do factor <strong>de</strong> distorção radial k 1 .<br />
Foi também concebido e implementado um software <strong>de</strong> simulação, <strong>de</strong> maneira a ser<br />
possível testar o algoritmo <strong>de</strong> calibração e permitir a análise dos resultados, sem<br />
aquisição <strong>de</strong> qualquer espécie dos pontos <strong>de</strong> calibração.<br />
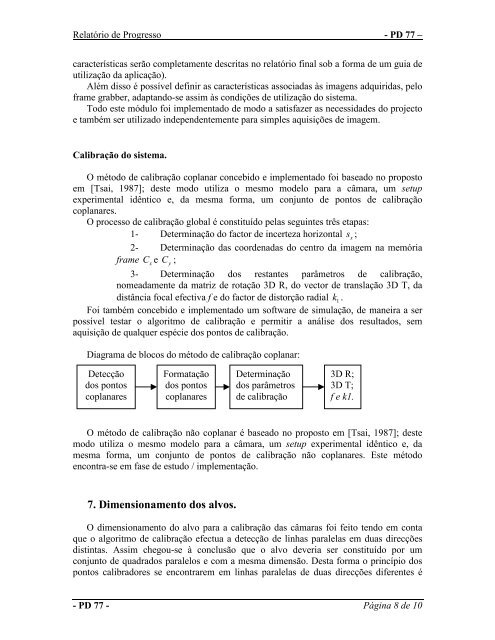
Diagrama <strong>de</strong> blocos do método <strong>de</strong> calibração coplanar:<br />
Detecção<br />
dos pontos<br />
coplanares<br />
Formatação<br />
dos pontos<br />
coplanares<br />
O método <strong>de</strong> calibração não coplanar é baseado no proposto em [Tsai, 1987]; <strong>de</strong>ste<br />
modo utiliza o mesmo mo<strong>de</strong>lo para a câmara, um setup experimental idêntico e, <strong>da</strong><br />
mesma forma, um conjunto <strong>de</strong> pontos <strong>de</strong> calibração não coplanares. Este método<br />
encontra-se em fase <strong>de</strong> estudo / implementação.<br />
7. Dimensionamento dos alvos.<br />
Determinação<br />
dos parâmetros<br />
<strong>de</strong> calibração<br />
3D R;<br />
3D T;<br />
f e k1.<br />
O dimensionamento do alvo para a calibração <strong>da</strong>s câmaras foi feito tendo em conta<br />
que o algoritmo <strong>de</strong> calibração efectua a <strong>de</strong>tecção <strong>de</strong> linhas paralelas em duas direcções<br />
distintas. Assim chegou-se à conclusão que o alvo <strong>de</strong>veria ser constituído por um<br />
conjunto <strong>de</strong> quadrados paralelos e com a mesma dimensão. Desta forma o princípio dos<br />
pontos calibradores se encontrarem em linhas paralelas <strong>de</strong> duas direcções diferentes é<br />
- PD 77 - Página 8 <strong>de</strong> 10