Raport 2006-2008 PCFI MEDIMA UCV IVANESCU.pdf
Raport 2006-2008 PCFI MEDIMA UCV IVANESCU.pdf
Raport 2006-2008 PCFI MEDIMA UCV IVANESCU.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Raport</strong> de autoevaluare a platformei/laboratorului de formare şi cercetare<br />
interdisciplinar 1<br />
1. Date de identificare PFCI<br />
• Denumire<br />
PLATFORMA MULTIMEDIA PENTRU INSTRUIRE, CERCETARE ŞI DEZVOLTARE DE<br />
APLICAŢII ÎN MECATRONICĂ ŞI AUTOMATICĂ<br />
• Instituţie gazdă<br />
UNIVERSITATEA DIN CRAIOVA<br />
• Adresa, Tel./Fax<br />
STR. A.I. CUZA NR.13, tel: 0251 414398, fax: 0251 411688<br />
• Director / Persoana de Contact<br />
PROF. DR. ING. MIRCEA IVĂNESCU<br />
• Pagina web<br />
http://robotics.ucv.ro/labmultimedia<br />
2. Definirea PFCI<br />
• Scopul şi principalele obiective ale PFCI<br />
Propunerea pentru realizarea Platformei multimedia pentru instruire, cercetare şi dezvoltare de<br />
aplicaţii în Mecatronică şi Automatică s-a bazat pe premise certe şi şi-a propus atingerea unor<br />
scopuri.<br />
Premisele avute în vedere au susţinut existenţa resurselor umane şi materiale necesare pentru succesul<br />
proiectului:<br />
- Existenţa unor colective academice puternice, cu rezultate remarcabile în cercetarea<br />
ştiinţifică din domeniile Mecatronică (Mecanică, Electronică, Calculatoare, Automatică - domeniu<br />
interdisciplinar, integrator) şi Automatică. Aceste colective şi-au valorificat rezultatele cercetarilor în<br />
granturi şi contracte atât la nivel naţional cât şi la nivel internaţional. În acelaşi context s-au organizat<br />
manifestări ştiinţifice internaţionale de prestigiu şi imapact. S-au stabilit relaţii de cooperare<br />
academică şi de cercetare cu colective valoroase din Europa şi America. Activitatea de cercetare se<br />
desfaşoară în centre recunoscute CNCSIS.<br />
- În cadrul Facultăţii de Automatică, Calculatoare şi Electronică funcţionează o şcoală<br />
doctorală prestigioasă şi programe masterale solide. Facultatea continuă să-şi selecteze studenţii prin<br />
examen clasic. Studenţii facultăţii s-au remarcat la compeţitii naţionale şi internaţionale. Facultatea<br />
trimite anual zeci de studenţi pentru stagii de formare în străinătate. Toate cele de mai sus susţin<br />
posibilitatea integrării în activitatea de cercetare a unui grup important de tineri studenţi, masteranzi şi<br />
doctoranzi.<br />
- În cadrul Facultăţii de Automatică, Calculatoare şi Electronică funcţionează, din 2005,<br />
specializarea Ingineria sistemelor multimedia, care valorifică experienţa unui Colegiu de Tehnologii<br />
Audio-Video şi Multimedia. Multimedia este un domeniu care contribuie la întărirea caracterului<br />
multidisciplinar al proiectului.<br />
- În cadrul programelor naţionale şi internaţionale, s-a acumulat o bogată experienţă legată de<br />
învăţământul continuu şi la distanţă şi utilizarea tehnologiilor multimedia atât în procesul de instruire,<br />
dar şi în acela de cercetare.<br />
- În facultate există laboratoare pentru a căror dotare s-au facut eforturi deosebite şi s-au<br />
utilizat atât fondurile proprii ale facultăţii (situaţie remarcabilă în contextul actual) cât şi fondurile<br />
atrase prin derularea programelor naţionale şi internaţionale în care facultatea este implicată. Aceste<br />
laboratoare acoperă aria tematică Mecatronică şi Automatică şi dispun de facilităţi multimedia.<br />
1 Platforma/Laborator de Formare şi Cercetare Interdisciplinară - PFCI<br />
1
Obiectivele propuse susţin, pe de o parte, necesitatea implementării proiectului, iar, pe de altă parte,<br />
fezabilitatea propunerii:<br />
- S-a dorit implementarea unei platforme Multimedia, de înaltă performanţă tehnică, sub forma<br />
unui laborator distribuit în cadrul Departamentului de Automatică şi Mecatronică de la Facultatea de<br />
Automatică, Calculatoare şi Electronică a Universităţii din Craiova.<br />
- Funcţionarea acestei platforme se distribuie pe două direcţii importante, dar nu disjuncte:<br />
instruirea prin metode moderne şi potenţarea cercetării în domeniul interdisciplinar al Mecatronicii.<br />
- Procesul de instruire bazat pe tehnologii multimedia performante se adresează atât mediului<br />
academic (sub toate formele lui de organizare: licenţă, masterat şi doctorat), dar şi mediului regional<br />
(industrial, tehnic, economic, medical) care va apela masiv în viitorul apropiat, în contextul integrării<br />
europene, la forme moderne, eficiente şi recunoscute, de instruire continuă, inclusiv la distanţă.<br />
- Activitatea de cercetare precum şi aceea de dezvoltare de aplicaţii, chiar şi atunci când<br />
abordează domenii interdisciplinare, aşa cum este Mecatronica care susţine o fuzionare a unor domenii<br />
de înalt nivel ştiintific Mecanică, Electronică, Calculatoare, Automatică, pot fi susţinute eficient prin<br />
metode şi tehnici performante de tip multimedia. S-au identificat posibilităţi certe de utilizare similară<br />
a unor module multimedia, cu facilităţi hardware şi software, în domenii de cercetare interdisciplinară<br />
distincte.<br />
- Facilităţile de cercetare şi dezvoltare de aplicaţii obţinute în cadrul acestei platforme vor fi<br />
oferite şi mediului economic regional. Întreprinderile mici şi mijlocii sunt parteneri potenţiali care pot<br />
să beneficieze de facilităţile platformei în cadrul programelor comune.<br />
• Descrierea componentei formative a PFCI (programe de master iniţiate /<br />
acreditate, domeniul/direcţia de specializare în cadrul programelor master,<br />
competenţe dobândite în urma studiilor master, modul de utilizare a<br />
echipamentelor PFCI în cadrul activităţilor la disciplinele incluse în<br />
programele de master)<br />
Proiectul şi-a propus:<br />
- Dezvoltarea unei noi paradigme de colaborare între specialiştii în mecanică, electronică,<br />
calculatoare şi automatică: MECAtronica.<br />
- Dezvoltarea resurselor umane prin programe de tip: Master, Doctorat, postuniversitare.<br />
Au funcţionat programe master anterioare procesului Bologna, cu o bază de instruire mult<br />
îmbunătăţită, asociate ciclului de pregătire de 5 ani, care au beneficiat de utilizarea echipamentelor<br />
achiziţionate în cadrul platformei:<br />
- Automatica sistemelor complexe (36 locuri în 2007)<br />
- Inginerie software (35 locuri în 2007)<br />
- Sisteme distribuite (26 locuri în 2007)<br />
Facilităţile tehnice, tehnologice şi de cercetare ale actualei dotări a platformei au susţinut activităţile<br />
formative ale acestor programe master.<br />
S-au elaborat propunerile pentru 3 noi programe de master de tip Bologna. Corelat cu<br />
dezvoltarea economico-socială a regiunii, precum şi cu Planul de dezvoltare instituţională a<br />
Universităţii din Craiova, se propun în cadrul domeniului Ingineria sistemelor, trei direcţii pentru<br />
studii master:<br />
- Automatica sistemelor complexe<br />
- Tehnologii informatice în ingineria sistemelor,<br />
sub coordonarea Catedrei de Automatică a Facultaţii de Automatică, Calculatoare şi Electronică.<br />
Competenţe dobândite in cadrul acestor două programe sunt:<br />
- Proiectarea, configurarea şi implementarea sistemelor de conducere aferente<br />
proceselor industriale continue.<br />
2
- Proiectarea şi utilizarea sistemelor integrate pentru prelucrarea numerică a<br />
informaţiei (embeded systems).<br />
- Proiectarea şi integrarea sistemelor avansate de conducere (sisteme robuste,<br />
neliniare, optimale, adaptive, ierarhizate, distribuite).<br />
- Utilizarea arhitecturilor neconvenţionale în sistemele automate (nanotehnologii,<br />
acţionari neconvenţionale, senzori inteligenţi, fuziunea datelor).<br />
- Utilizarea tehnicilor şi metodelor inteligenţei artificiale în proiectarea avansată<br />
(neuro, fuzzy, expert, CAD/CAM, fabricaţie virtuală).<br />
- Întocmirea şi gestionarea execuţiei de proiecte în domeniul automaticii şi<br />
informaticii aplicate precum şi în domenii conexe (mentenanţă).<br />
- Numărul mediu estimat de absolvenţi pentru ciclul de licenţă este 120.<br />
- Sisteme de conducere în Robotică<br />
sub coordonarea Catedrei de Mecatronică a Facultaţii de Automatică, Calculatoare şi Electronică.<br />
Competenţe dobândite in cadrul acestui program sunt:<br />
- Proiectarea, configurarea şi implementarea sistemelor de conducere în robotică<br />
şi în mecatronică.<br />
- Utilizarea arhitecturilor neconvenţionale în robotică şi mecatronică<br />
(nanotehnologii, acţionari neconvenţionale, senzori inteligenţi, fuziunea datelor).<br />
- Proiectarea şi integrarea sistemelor avansate de conducere (sisteme fuzzy,<br />
neliniare, optimale, adaptive, ierarhizate, distribuite).<br />
- Utilizarea tehnicilor şi metodelor inteligenţei artificiale în proiectarea avansată<br />
(neuro, fuzzy, expert, CAD/CAM, fabricaţie virtuală).<br />
- Întocmirea şi gestionarea execuţiei de proiecte în robotică şi mecatronică precum<br />
şi în domenii conexe (mentenanţă).<br />
Pentru cele trei cicluri master menţionate, se desprind competenţe comune:<br />
- Competenţe manageriale pentru proiecte de cercetare (economie, legislaţie<br />
europeană),<br />
- Abilităţi de lucru în echipă, cooperare interdisciplinară şi integrare de sisteme,<br />
- Abilităţi manageriale pentru activităţi tehnice şi economice.<br />
Dezvoltarea procesului instructiv-educativ a beneficiat în mod concret de suportul material asigurat de<br />
achiziţiile efectuate în cadrul platformei multimedia menţionate. La achiziţionarea echipamentelor s-a<br />
avut în vedere ca acestea să răspundă cerinţelor reieşite din evoluţia teoretico-aplicativă şi să asigure<br />
suportul logistic pentru activităţile de cercetare fundamentală şi aplicativă.<br />
Există preocupări pentru interconectarea unor laboratoare din cadrul Platformei cu unităţi de cercetare<br />
şi laboratoare similare din ţară şi străinatate, inclusiv cu unităţi economice.<br />
S-a continuat desfăşurarea, cu o bază de instruire mult îmbunătăţită, a 4 programe de studii<br />
postuniversitare:<br />
- Informatică - tehnologii asistate de calculator.<br />
- Societatea informaţională. Management şi marketing. Informatică economică.<br />
- Societatea informaţională. Prevenirea şi combaterea criminalităţii informaţionale.<br />
- Mecatronică.<br />
• Descrierea componentei de cercetare ştiinţifică a PFCI (principalele direcţii<br />
de cercetare fundamentală şi/sau aplicativă, modalităţile de acces şi utilizare a<br />
infrastructurii de cercetare)<br />
Proiectul şi-a propus:<br />
- Creşterea vizibilităţii internaţionale a colectivului de cercetare, precum şi integrarea sa în<br />
reţele europene şi internaţionale de cercetare.<br />
3
- Promovarea cercetărilor în domeniul interdisciplinar al Mecatronicii<br />
- Accesul larg, pentru comunitatea ştiinţifică din regiune la o platformă cu facilităţi<br />
Multimedia.<br />
- Realizarea de parteneriate S/T între echipa sau centrele de cercetare ale departamentului şi<br />
structuri de cercetare similare internaţionale<br />
- Promovarea cercetărilor avansate şi interdisciplinare prin utilizarea şi a unor resurse<br />
multimedia de înaltă performanţă. Optimizarea schimbului de informaţii în cadrul comunităţii S/T<br />
- Integrarea platformei astfel create în structuri similare europene. Partajarea resurselor de<br />
cercetare cu parteneri străini; participarea la pregătirea (realizarea) propunerilor de proiecte pe<br />
programe europene şi internaţionale (ex. FP6, FP7)<br />
- Sprijinirea transferului de tehnologie în domeniul interdisciplinar Mecatronică.<br />
- Realizarea de materiale de prezentare a colectivelor (centrelor) de cercetare şi a cercetătorilor<br />
români, în vederea creşterii vizibilităţii internaţionale.<br />
Elementele definitorii ale activităţii de cercetare ştiinţifică în domeniul Automaticii sunt:<br />
- Domeniul principal al cercetărilor este Automatica teoretică (prin suportul său – Teoria<br />
Sistemelor) şi aplicată în domenii industriale (automatizarea proceselor din energetică, aeronautică,<br />
industria chimică, electrotehnică, biotehnologie) şi neinginereşti (biologie, medicină). Dintre direcţiile<br />
mari pe care se desfăşoară cercetările şi unde s-au obţinut rezultate notabile (publicaţii în fluxul<br />
principal de reviste, citări în reviste din fluxul principal, granturi câştigate prin competiţie, lucrări<br />
invitate în sesiuni sau în plenul conferinţelor internaţionale) se pot aminti:<br />
- Teoria sistemelor neliniare (stabilitate şi oscilaţii) – direcţie pe care există un<br />
Centru de Cercetare acreditat CNCSIS;<br />
- Teoria sistemelor cu întârziere şi propagare;<br />
- Conducerea în regim alunecător şi aplicaţii;<br />
- Aplicaţii ale conducerii robuste şi tolerante la defecte;<br />
- Conducerea specifică a proceselor din diverse ramuri industriale, biologie<br />
teoretică şi medicină;<br />
- Modelarea fizico-matematică şi identificarea dinamicii proceselor;<br />
- Sisteme integrate în reţea.<br />
Elemente definitorii ale activităţii de cercetare ştiinţifică în domeniul Mecatronicii sunt:<br />
Domeniul principal al cercetărilor este Robotica, inclusă în domeniul larg al Mecatronicii şi<br />
aplicată în domenii industriale (automatizarea proceselor industriale, aeronautică, industria de apărare,<br />
electrotehnică, biotehnologie) şi neinginereşti (biologie, medicină, protetică). Dintre direcţiile mari pe<br />
care se desfăşoară cercetările şi unde s-au obţinut rezultate notabile (publicaţii în fluxul principal de<br />
reviste, citări în reviste din fluxul principal, granturi câştigate prin competiţie, lucrări invitate în<br />
sesiuni sau în plenul conferinţelor internaţionale) se pot aminti:<br />
- Mecatronică şi robotică – direcţie pe care există un Centru de Cercetare<br />
acreditat CNCSIS, respectiv Centrul de Cercetare Mecatronică şi Robotică,<br />
persoană juridică,<br />
- Sisteme flexibile de fabricaţie - direcţie pe care există un Centru de Cercetare<br />
pentru Robotică şi Sisteme flexibile de Fabricaţie acreditat RELANSIN;<br />
- Prelucrarea şi recunoaşterea imagimilor;<br />
- Comunicaţii mobile;<br />
- Sisteme robotice reconfigurabile şi autoreproductibile;<br />
- Materiale inteligente.<br />
Elementul comun al activităţii de cercetare ştiinţifică în domeniile Automaticii şi Mecatronicii îl<br />
reprezintă îmbinarea aspectelor teoretice cu experimentul tip benchmark: experimentele de acest tip<br />
sunt acceptate universal prin convenţie şi implementate pe platforme convenite la nivelul marilor<br />
societăţi profesionale (IEEE, ASME, AIAA, SRR, ARIES) şi implementate, în cazul nostru, pe<br />
platformele laboratoarelor catedrei (de exemplu experimente Quanser, SMC, FESTO). Cercetările<br />
experimentale pe platforme au avantajul că pot integra doctoranzi (prin tematica de cercetare),<br />
masteranzi (prin disertaţii) şi chiar studenţi cu pregătire corespunzătoare.<br />
4
• Descrierea caracterului interdisciplinar al PFCI<br />
Caracterul multidisciplinar al platformei este susţinut şi de faptul că, atât în planul instruirii cât şi în<br />
acela al cercetării şi dezvoltării de aplicaţii, vor fi abordate, pe baza experienţei deja dobândite până în<br />
prezent, şi domenii conexe precum: electronica medicală, modelarea şi simularea sistemelor<br />
fiziologice, dezvoltarea de aplicaţii bionice cu aplicaţii la roboţii mobili, prelucrarea şi interpretarea<br />
imaginilor medicale cu aplicaţii în diagnosticarea asistată de calculator, soluţii mecatronice pentru<br />
protezare, aplicaţii dedicate persoanelor cu dizabilităţi. În acest sens, parteneriatele deja existente<br />
cu colectivele medicale vor fi întărite, iar cadrele medicale se află printre potenţialii beneficiari ai<br />
cursurilor şi proiectelor dezvoltate în cadrul proiectului.<br />
Obiectivele Platformei multimedia pentru instruire, cercetare şi dezvoltare de aplicaţii în mecatronică<br />
şi automatică susţin caracterul de interdisciplinaritate, prin implementarea platformei sub forma<br />
unui laborator distribuit în cadrul Facultăţii de Automatică, Calculatoare şi Electronică a Universităţii<br />
din Craiova, accesibil tuturor departamentelor şi structurilor universităţii, precum şi partenerilor.<br />
Funcţionarea platformei este concepută pe două direcţii importante, dar nu disjuncte:<br />
- instruirea prin metode moderne,<br />
- potenţarea cercetării, în domeniul interdisciplinar al Mecatronicii şi Automaticii.<br />
Activitatea de cercetare precum şi aceea de dezvoltare de aplicaţii, iniţiate şi aflate în derulare,<br />
presupun fuzionarea şi conlucrarea unor domenii: Mecanică, Electronică, Calculatoare, Automatică,<br />
susţinute eficient prin metode şi tehnici performante de tip multimedia.<br />
Temele contractelor de cercetare naţionale şi internaţionale aflate în derulare sau propuse pentru<br />
finanţare prin metodele de realizare şi implementare a obiectivelor propuse din domenii de cercetare<br />
fundamentală şi exploratorie, sunt bazate pe abordare interdisciplinară.<br />
Tematicile de cercetare ale contractelor aferente platformei se încadrează în domeniile mecatronicii şi<br />
automaticii, cu un caracter interdisciplinar legat de ariile tehnice mai sus enumerate, dar şi de<br />
discipline fundamentale cum ar fi matematica, fizica, chimia şi biologia. Cercetările fundamentale sunt<br />
în fapt stimulate de problematica unor tehnici şi tehnologii noi din domeniul ştiintelor aplicate; între<br />
acestea mecatronica şi automatica sunt poate furnizorii cei mai importanţi pentru cercetările<br />
fundamentale pentru că operează la nivel informaţional mai mult decât la cel fizic (adică mai mult cu<br />
ecuaţii decât cu descrieri lingvistice) precum şi pentru că furnizează şi instrumente de studiu şi<br />
abordare acumulante de informaţie.<br />
Caracterul de interdisciplinaritate derivă şi din:<br />
- servicii şi resurse Multimedia pentru susţinerea activităţii de cercetare în Mecatronică şi<br />
Automatică,<br />
- cooperare internaţională, şi cu unităţi regionale, consultanţa, pe teme de cercetare<br />
interdisciplinare, proiectare şi dezvoltare de aplicaţii.<br />
Activitatea formativă şi de instruire în domeniile interdisciplinare se realizează prin:<br />
- furnizarea de servicii şi resurse multimedia pentru susţinerea procesului de instruire, inclusiv<br />
pentru direcţiile de master cu caracter puternic de interdisciplinaritate: Automatica sistemelor<br />
complexe, Tehnologii informatice în ingineria sistemelor, Sisteme de conducere în Robotică,<br />
- tehnici noi de predare-învăţare, tehnici noi de evaluare: Cooperarea cu organismele<br />
regionale, Cooperare internaţională în domeniul instruirii, perfectionării şi formării continue în<br />
domenii interdisciplinare; Susţinerea dezvoltării Şcolii doctorale, prin suportul logistic şi<br />
formativ.<br />
Direcţii de cercetare ale colectivului care susţin caracterul interdisciplinar al preocupărilor ştiinţifice:<br />
- Sisteme de detecţie şi localizare a defectelor şi siguranta proceselor,<br />
- Modelarea, identificarea, simularea şi achiziţia datelor în procesele tehnologice,<br />
5
- Conducerea adaptivă şi neurală pentru structuri robotice şi procese industriale,<br />
- Telecomanda şi telesemnalizarea instalaţiilor,<br />
- Sisteme neconvenţionale de conducere a roboţilor,<br />
- Simularea sistemelor flexibile de fabricaţie bazată pe realitatea virtuală,<br />
- Biotehnologie, biochimie şi biorobotică,<br />
- Aplicaţii de conducere în industria chimică, energetică, aeronautică, constructoare de maşini,<br />
- Prelucrarea şi recunoaşterea imaginilor,<br />
- Dezvoltarea de algoritmi de conducere fuzzy şi neuronale,<br />
- Tehnologii informatice şi multimedia pentru societatea informaţională,<br />
- Sisteme grafice avansate.<br />
• Reglementări instituţionale aplicabile platformei; Proceduri iniţiate<br />
Platforma multimedia pentru instruire, cercetare şi dezvoltare de aplicaţii în mecatronică şi automatică<br />
îşi desfăşoară activitatea în cadrul instituţional al Universităţii din Craiova şi în conformitate cu<br />
Statutul propriu (Anexa A) aprobat de Senatul Universităţii din Craiova.<br />
3. Structura PFCI<br />
• Laboratoare distincte constituite în cadrul PFCI (obiect de activitate, locaţie,<br />
responsabil laborator, fotografii cu echipamentele majore de cercetare<br />
ştiinţifică instalate în cadrul laboratoarelor PFCI şi achiziţionate în cadrul<br />
proiectului)<br />
- Laborator Inginerie şi proiectare asistate de calculator (identificat cu sigla M-IPAC în cadrul acestui<br />
raport), Prof. Dr. Ing. D. Cojocaru – 60 m 2<br />
- Laborator Robotică şi sisteme flexibile de fabricaţie (M-RSFF), Prof. Dr. Ing. M. Niţulescu – 60 m 2<br />
- Laborator Componente şi sisteme robotice (M-CSR), Prof. Dr. Ing. V. Stoian – 60 m 2<br />
- Laborator Multimedia pentru mecatronică (M-MMM), Prof. Dr. Ing. I. Diaconu – 50 m 2<br />
- Laborator Automate programabile (M-AP), Prof. Dr. Ing. D. Popescu – 45 m 2<br />
- Laborator Sisteme integrate (Embedded Systems) (M-SI), Conf. Dr. Ing. S. Nicola – 90 m2<br />
- Laborator Prelucrarea imaginilor şi recunoasterea formelor (M-PIRF), Prof. Dr. Ing. D. Cojocaru –<br />
20 m2<br />
- Laborator Materiale şi sisteme inteligente (M-MSI), Prof. Dr. Ing. N. Bîzdoacă – 20 m2<br />
- Laborator e-Mecatronică (M-eM), Prof. Dr. Ing. N. Bîzdoacă - 40 m2<br />
- Laborator Multimedia pentru automatică (A-MMA), Prof. Dr. Ing. E. Petre – 80 m2<br />
- Laborator Conducerea proceselor industriale (A-CPI), Prof. Dr. Ing. M. Vînătoru - 70 m2<br />
- Laborator Sisteme hidraulice şi pneumatice (A-SHP), Prof. Dr. Ing. E. Bobaşu - 70 m2<br />
- Laborator Programare şi simulare numerică (A-PSN), Prof. Dr. Ing. E. Iancu - 70 m2<br />
- Laborator Inginerie şi proiectare asistată (A-IPA), Prof. Dr. Ing. C. Ionete - 40 m2<br />
- Laborator Sisteme şi echipamente de conducere (A-SEC), Prof. Dr. Ing. E. Petre - 70 m 2<br />
- Laborator Instrumentaţie virtuală (A-IVIR), Prof. Dr. Ing. D. Selişteanu - 40 m 2<br />
- Laborator Sisteme automate numerice (A-SAN), Prof. Dr. Ing. D. Popescu - 40 m 2<br />
Laboratoare create in cadrul PFCI:<br />
A1. Laborator multimedia pentru Mecatronică;<br />
http://robotics.ucv.ro/labmultimedia/galerie_foto_mecatronica.php<br />
Descrierea laboratorului: laboratorul a fost realizat pentru desfăşurarea activităţilor practice la<br />
specializarea “Ingineria sistemelor multimedia” şi a folosit suportul financiar oferit de Ministerul<br />
6
Educaţiei şi Cercetării prin contractul obţinut pe bază de competiţie naţională “Platformă multimedia<br />
pentru instruire, cercetare şi dezvoltare de aplicaţii în mecatronică şi automatică”, 4873 / 08.08.<strong>2006</strong>,<br />
Director Prof. dr. ing. Mircea Ivănescu.<br />
Dotarea laboratorului: Laboratorul cuprinde numai echipamente de ultimă generaţie, dintre care<br />
amintim: 2 camere de luat vederi de înaltă rezoluţie, aparat performant de videoproiecţie, reţea de 17<br />
calculatore cu facilităţi multimedia extinse, ploter pentru tipărire pe formate mari, imprimantă color de<br />
înaltă rezoluţie, copiator color, sistem home cinema, 2 servere, monitor TV cu plasmă etc.<br />
Discipline didactice derulate în laborator: Fundamente audio-video; Grafică; Tehnologii<br />
mulimedia; Realitate virtuală; Echipamente audio-video; Interfeţe om-maşină; Tehnologii WEB<br />
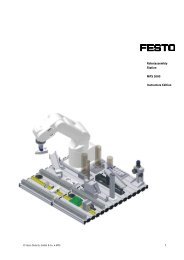
A2. Laborator multimedia pentru Automatică;<br />
http://robotics.ucv.ro/labmultimedia/galerie_foto_automatica.php<br />
Descrierea laboratorului: laboratorul a fost realizat pentru desfăşurarea activităţilor practice în<br />
domeniul Ingineria sistemelor, specializarile “Automatică şi informatică aplicată” şi “Ingineria<br />
sistemelor multimedia” şi a folosit suportul financiar oferit de Ministerul Educaţiei şi Cercetării prin<br />
contractul obţinut pe bază de competiţie naţională “Platformă multimedia pentru instruire, cercetare şi<br />
dezvoltare de aplicaţii în mecatronică şi automatică”, 4873 / 08.08.<strong>2006</strong>, Director Prof. dr. ing. Mircea<br />
Ivănescu.<br />
Dotarea laboratorului: Laboratorul cuprinde echipamente de ultimă generaţie, dintre care amintim:<br />
reţea de 12 calculatoare cu facilităţi multimedia extinse, aparat performant de videoproiecţie,<br />
echipamente multifuncţionale de modelare, identificare şi control Quanser Canada, echipamente<br />
specializate de achiziţie a datelor National Instruments SUA, ultimele versiuni ale sistemelor de<br />
dezvoltare şi medii de programare Matlab/Simulink şi LabVIEW (SUA), sisteme de dezvoltare<br />
dSPACE Germania, sisteme de instruire Lab-Volt Canada, osciloscoape şi generatoare Tektronix etc.<br />
Discipline didactice derulate în laborator: Ingineria reglării automate; Software industrial; Sisteme<br />
numerice de reglare; Sisteme cu microprocesoare; Sisteme de operare şi limbaje în timp real;<br />
Prelucrarea numerică a semnalelor; Procesare paralelă şi sisteme distribuite în multimedia.<br />
Celelalte laboratoare din lista de mai sus au fost modernizate şi cu echipamente achiziţionate în cadrul<br />
PFCI.<br />
• Resursa umană de bază a PFCI (se vor preciza numai persoanele cu atribuţii<br />
directe în coordonarea activităţilor formative şi de cercetare, nu membrii<br />
echipelor de cercetare care derulează proiecte în cadrul PFCI)<br />
Persoanele cu atribuţii directe în coordonarea activităţilor formative şi de cercetare în cadrul PFCI sunt<br />
următoarele, iar modul de organizare în care sunt interconectate este prezentat în organigrama<br />
următoare:<br />
- PROF. DR. ING. MIRCEA IVĂNESCU<br />
- PROF. DR. ING. DORIAN COJOCARU<br />
- PROF. DR. ING. ILIE DIACONU<br />
- PROF. DR. ING. DAN POPESCU<br />
- PROF. DR. ING. MATEI VÎNĂTORU<br />
- PROF. DR. ING. DAN SELIŞTEANU<br />
- PROF. DR. ING. NICU BÎZDOACĂ<br />
- PROF. DR. ING. MIRCEA NIŢULESCU<br />
- PROF. DR. ING. EMIL PETRE<br />
11
CONSILIUL DE CONDUCERE<br />
DIRECTOR PLATFORMA: PROF. DR. ING. MIRCEA IVĂNESCU<br />
Coordonator activitate programe formative: PROF.<br />
DR. ING. ILIE DIACONU<br />
Coordonator activitate administrativă: PROF.<br />
DR. ING. DORIAN COJOCARU<br />
Membri:<br />
PROF. DR. ING. DAN POPESCU<br />
PROF. DR. ING. MATEI VÎNĂTORU<br />
PROF. DR. ING. DAN SELIŞTEANU<br />
RESPONSABILI DOMENII :<br />
Multimedia: PROF. DR. ING. NICU BÎZDOACĂ<br />
Mecatronică: PROF. DR. ING. MIRCEA NIŢULESCU<br />
Automatică: PROF. DR. ING. EMIL PETRE<br />
MEMBRII PLATFORMEI:<br />
Cadre didactice /<br />
cercetători<br />
Doctoranzi Masteranzi Studenţi<br />
Personal de întreţinere<br />
4. <strong>Raport</strong> financiar<br />
• Situaţia execuţiei bugetare în raport cu planul de realizare iniţial<br />
Nr.crt. Anul Suma prevăzută lei Suma cheltuită lei Procentual Diferenţa lei<br />
1 <strong>2006</strong> 625.000 582.761 93,24% 42.239<br />
2 2007 2.500.000 2.491.662 99,66% 8.338<br />
3 <strong>2008</strong> 1.000.000 998.195 99,82% 1.805<br />
Total 4.125.000 4.072.618 98,73% 52.382<br />
• Precizarea distinctă a contribuţiei financiare a universităţii la dezvoltarea PFCI<br />
Contribuţia financiară a universităţii la dezvoltarea PFCI este centralizată în anexele Anexa B <strong>2006</strong>,<br />
Anexa B 2007, Anexa Ba <strong>2008</strong>, Anexa Bb <strong>2008</strong>.<br />
În anii <strong>2006</strong>, 2007 şi <strong>2008</strong> colectivul platformei a atras din alte surse de finanţare echipamente care<br />
sunt utilizate împreună cu acelea achiziţionate din fondurile Platformei (Aproximativ 30% din<br />
valoarea totală de mai mult de 50 miliarde lei vechi).<br />
• Situaţie echipamente (se completează documentul echipamente.xls)<br />
S-a completat şi ataşat fisierul echipamente.xls (ANEXA C).<br />
12
5. Sustenabilitatea platformei<br />
• Se vor preciza proiectele derulate cu utilizarea infrastructurii de cercetare şi a<br />
resurselor umane ale PFCI<br />
• Pentru fiecare proiect se vor specifica laboratoarele/echipamentele din cadrul<br />
PFCI utilizate pentru realizarea obiectivelor/activităţilor din proiect<br />
Folosind şi infrastructura oferită de Platformă, s-au propus şi obţinut contracte de cercetare naţionale<br />
şi internaţionale, în anii <strong>2006</strong>, 2007 si <strong>2008</strong>:<br />
- 5 contracte internaţionale,<br />
- 32 contracte naţionale în valoare totală de aproximativ 50 miliarde lei vechi, aproximativ 1.300.000<br />
EURO.<br />
În cadrul acestor contracte de cercetare s-a pus accentul şi pe latura formativă pentru tinerii<br />
cercetători implicaţi.<br />
O parte importantă dintre aceste contracte va continua, chiar până în 2010. Colectivul implicat în<br />
susţinerea platformei, bazat pe capabilităţile de cercetare nou create, a făcut 18 propuneri de granturi<br />
de cercetare în competiţiile din trim. I <strong>2008</strong>, care se află în evaluare sau sunt propuse la finanţare.<br />
În Anexa D sunt centralizate informaţiile despre contractele de cercetare, internaţionale şi naţionale,<br />
finaţate sau în curs de evaluare.<br />
• Perspectiva platformei în intervalul 2009-2012<br />
Colectivul platformei şi-a stabilit strategia pentru activităţile care să conducă la dezvoltarea platformei<br />
pe cele două direcţii importante declarate, dar nu disjuncte:<br />
- instruirea prin metode moderne,<br />
- potentarea cercetării în domeniul interdisciplinar al Mecatronicii,<br />
pentru atingerea obiectivelor bazate pe tehnologii multimedia performante pentru:<br />
- mediul academic dedicat formelor de organizare: licenţă, masterat şi doctorat,<br />
- mediul regional: industrial, tehnic, economic, medical.<br />
Creşterea vizibilităţii şi generarea de proiecte pentru utilizarea eficientă a bazei materiale create<br />
prin:<br />
- Actualizarea permanentă şi accesul facil la pagina web: http://robotics.ucv.ro/labmultimedia, în<br />
limba română şi engleză.<br />
- Au fost depuse trei propuneri în programul FP7.<br />
Granturile internaţionale şi naţionale au prevăzută finanţarea pentru <strong>2008</strong>, multe până în 2012.<br />
6. Rezultate obţinute:<br />
• Teze de doctorat finalizate sau începute utilizând infrastructura de<br />
cercetare a platformei;<br />
În Facultatea de Automatică, Calculatoare şi Electronică funcţionează şi Şcoala Doctorală care include<br />
domeniile Ingineria Sistemelor şi respectiv Mecatronică şi Robotică. În această Şcoală Doctorală sunt<br />
incluşi 9 conducători de doctorat care fac parte şi care au activat în cadrul PFCI:<br />
- PROF. DR. ING. VLADIMIR RĂSVAN – domeniul Ingineria Sistemelor<br />
- PROF. DR. ING. MIRCEA IVĂNESCU – domeniul Ingineria Sistemelor<br />
- PROF. DR. ING. MATEI VÎNĂTORU – domeniul Ingineria Sistemelor<br />
- PROF. DR. ING. CONSTANTIN MARIN – domeniul Ingineria Sistemelor<br />
13
- PROF. DR. ING. DAN POPESCU – domeniul Ingineria Sistemelor<br />
- PROF. DR. ING. EMIL PETRE – domeniul Ingineria Sistemelor<br />
- PROF. DR. ING. DORIAN COJOCARU – domeniul Mecatronică şi Robotică<br />
- PROF. DR. ING. MIRCEA NIŢULESCU – domeniul Mecatronică şi Robotică<br />
- PROF. DR. ING. NICU BIZDOACA – domeniul Mecatronica si Robotica<br />
În perioada <strong>2006</strong>-<strong>2008</strong> au fost admişi la doctorat mai mult de 40 de tineri care au utilizat baza<br />
materială oferită de <strong>PCFI</strong> şi care vor contribui la susţinerea activităţii PFCI pe viitor. În aceeaşi<br />
perioadă au finalizat teza de doctorat şi au primit titlul de doctor inginer mai mult de 10 tineri<br />
cercetători. Datele se referă numai la colectivul implicat direct în Platforma Multimedia pentru<br />
Instruire, Cercetare şi Dezvoltare de Aplicaţii în Mecatronică şi Automatică şi ele sunt centralizate<br />
(selectate) în ANEXA E.<br />
• Articole;<br />
În perioada <strong>2006</strong>-<strong>2008</strong> membrii colectivului <strong>PCFI</strong> Platforma Multimedia pentru Instruire, Cercetare şi<br />
Dezvoltare de Aplicaţii în Mecatronică şi Automatică au publicat:<br />
- mai mult de 60 articole în reviste indexate ISI sau în baze de date internaţionale recunoscute,<br />
- mai mult de 200 de articole la manifestări internaţionale de prestigiu.<br />
În Anexa F sunt centralizate lucrările publicate şi alte aspecte (citări, membri în colective de redacţie,<br />
premii) care susţin prestigiul ştiinţific al colectivului, prestigiu care s-a consolidat şi prin utilizarea în<br />
cercetarea ştiinţifica a facilităţilor oferite de <strong>PCFI</strong>.<br />
• Colaborari internaţionale începute având platformele ca suport<br />
experimental<br />
Propuneri de proiecte FP7 ( 3 propuneri):<br />
- Open Architecture Systems with Real Time Control for Nano-Micro Manipulators Working in<br />
a Cooperative Regime, acronim SIDERCO, Call indentifier: FP7-NMP-2007-LARGE-1, Theme 4 –<br />
NMP - Nanosciences, Nanotechnologies, Materials and new Production Technologies, work<br />
programme topics: NMP-2007-3.5-2, project proposal May 2007, ID 214208 (consorţiul conţine 27<br />
parteneri din 11 ţări, 12 universităţi, 3 institute de cercetări, un centru de excelenţă european, 5 SME,<br />
etc.), propunere faza 1.<br />
- Software for Signature, Speech and Word Recognition (S3WR), project proposal May 2007, ID:<br />
214692, cordonator: prof. Sebastiano Impedovo (Italia). “Large-scale integrating project (IP)”,<br />
propunere faza 1. 9 parteneri: 1. Universitatea din Craiova, coordonator: Dorin Popescu.<br />
- Collaborative Artificial Systems composed of Cognitive Components with Autonomous<br />
Responsibilities (CoRes), project proposal May 2007, ID: 216730, coordinator: Juan Manuel Mieres<br />
Royo, ACCIONA (Spania). “Large Scale Integrating Project”, propunere faza 1. 13 parteneri.<br />
Universitatea din Craiova (România), coordonator: Dorin Popescu.<br />
Propuneri de contracte cu unităţi economice:<br />
- Contract cu tema „STUDIUL INTRODUCERII TEHNOLOGIILOR RFID ÎN GESTIUNEA<br />
DEPOZITELOR DE MATERIALE FINITE (PNEURI AUTO) ŞI A DISTRIBUŢIEI LOR CU<br />
APLICAŢII LA COMPANIA PIRELLI TYRES S.P.A. SLATINA”, în valoare de 15000 EUR (a<br />
fost semnat în <strong>2008</strong>).<br />
- Crearea unui centru regional de instruire pentru industria constructoare de automobile,<br />
dedicat pregătirii continue la nivel tehnician şi inginer cu noua uzină FORD în cadrul unor contracte<br />
de cercetare la nivel naţional prin formarea unor echipe mixte de cercetare şi folosirea reciprocă a<br />
echipamentelor şi instalaţiilor.<br />
14
- Crearea unui centru regional de instruire cu echipamente FESTO, dedicat pregătirii continue la<br />
nivel tehnician şi la nivel inginer, al treilea după Timişoara şi Braşov.<br />
- Colaborare cu Turck Automation pentru tehnologia RFID Turck.<br />
- Prin intermediul Pirelli Romania şi al fundaţiei Silvio Tronchetti-Provera s-au stabilit şi sunt<br />
prevăzute a se stabili contacte importante cu divizia de cercetare/dezvoltare a Pirelli Italia, precum şi<br />
cu firmele Pneu-Logic din Marea Britanie şi SGS Thomson.<br />
Acorduri de colaboare instituţionalizată semnate cu (selecţie):<br />
- ArtecLab (Laboratory for Art, Work, and Technology), University of Bremen, Germany,<br />
www.arteclab.uni-bremen.de<br />
- Groupe Ecole Superieure d'Ingenieurs en Electrotechnique et Electronique, Paris, France,<br />
www.esiee.fr<br />
- University of Bari, Italy, www.di.uniba.it<br />
- Vienna University of Technology, Department of Intelligent Handling and Robotics, Vienna,<br />
Austria, www.ihrt.tuwien.ac.at<br />
- Faculty of Electrical Engineering and Informatics, Kosice, Slovak Republic, www.fei.tuke.sk<br />
Prin aceste acorduri de colaborare sunt vizate direct următoarele:<br />
- schimburi de cercetători pentru documentare, schimb de experienţă, diseminare rezultate,<br />
- propuneri de contracte comune de cercetare din surse de finanţate europene,<br />
- expertiză academică pentru dezvoltarea de programe de master şi doctorat.<br />
15
ANEXA A<br />
STATUTUL PLATFORMEI MULTIMEDIA PENTRU INSTRUIRE, CERCETARE SI<br />
DEZVOLTARE DE APLICATII IN MECATRONICA SI AUTOMATICA<br />
CAPITOLUL 1 . Denumirea asociatiei, caracterul, forma juridica, durata si sediul.<br />
Art. 1. La Universitatea din Craiova, ia fiinta o structura Platforma multimedia pentru instruire,<br />
cercetare si dezvoltare de aplicatii in mecatronica si automatica<br />
Art. 2. Aceasta structura, fara scop patrimonial, este o saociatie, functionand ca institutie stiintifica.<br />
Art. 3. Prezenta asociatie se infiinteaza pe o durata nedeterminata, sub conditia cofinantarii, pe o<br />
durata de 24 de luni calendaristice, de catre CNCSIS, in cadrul programului Platforme/ Laboratoare<br />
de formare si cercetare interdisciplinara.<br />
Art. 4. Dupa scurgerea celor 24 de luni de cofinantare, Platforma multimedia pentru instruire,<br />
cercetare si dezvoltare de aplicatii in mecatronica si automatica isi va continua activitatea in<br />
mod autonom, prin autofinantare, ca structura a Universitatii din Craiova.<br />
Art. 5. Sediul Platformei multimedia pentru instruire, cercetare si dezvoltare de aplicatii in<br />
mecatronica si automatica este in municipiul Craiova, Bulevardul Decebal, nr. 107.<br />
CAPITOLUL 2 . Scopul si obiectul de activitate al asociatiei<br />
Art. 6. Asociatia se infiinteaza in vederea:<br />
a) desfasurararii unei activitati de cercetare stiintifica fundamentala, experimentala si<br />
tehnologica. Activitatea de cercetare poate fi initiata pe baza de contracte de cercetare cu<br />
institutii de stat, firme de productie, asociatii comerciale sau altele;<br />
b) colaborarii cu asociatii similare din tara si din strainatate;<br />
c) desfasurarii unei activitati de diseminare si publicare a rezultatelor de cercetare stiintifica<br />
proprii sau nu;<br />
d) desfasurarii unei activitati de instruire, formare continua, reconversie profesionala<br />
e) organizarii de manifestari stiintifice (simpozioane, conferinte, workshop, etc)<br />
Art. 7. In indeplinirea scopului formulat la art. 6., asociatia va actiona in sensul:<br />
a) Promovarii cercetarilor in domeniul interdisciplinar al Mecatronicii.<br />
b) Accesului larg, pentru comunitatea stiintifica din regiune la o platforma cu facilitati<br />
Multimedia.<br />
c) Dezvoltarii unei noi paradigme de colaborare intre specialistii in mecanica, electronica,<br />
calculatoare si automatica: MECAtronica .<br />
d) Promovarii cercetarilor avansate si interdisciplinare prin utilizarea si a unor resurse<br />
multimedia de inalta performanta.<br />
e) Dezvoltarii resurselor umane prin programe de tip: Master, Doctorat, cursuri postuniversitare.<br />
f) Integrarii platformei astfel create in structuri similare europene, cum este de exemplu<br />
platforma tehnologica MANUFUTURE.<br />
g) Sprijinirii transferului de tehnologie in domeniul interdisciplinar Mecatronica, Automatica,<br />
Multimedia.<br />
Art.8. Cu respectarea legislatiei in vigoare si a prevederilor prezentului Statut,<br />
Platforma multimedia pentru instruire, cercetare si dezvoltare de aplicatii in mecatronica<br />
si automatica poate desfasura activitati subsidiare cu caracter economic, in vederea obtinerii de<br />
venituri necesare indeplinirii obiectivelor sale. In acest scop, Consiliul de Conducere poate, eventual,<br />
decide infiintarea de societati comerciale pe baza legislatiei in vigoare.<br />
CAPITOLUL 3 . Patrimoniul asociatiei<br />
Art. 9. La data constituirii, patrimoniul initial al Platformei multimedia pentru instruire,<br />
cercetare si dezvoltare de aplicatii in mecatronica si automatica este constituit din spatiile si<br />
dotarile mentionate in propunerea de grant, la paragrafele 7.1.5, 10.1 si 10.2.<br />
Art. 10. Patrimoniul Platformei multimedia pentru instruire, cercetare si dezvoltare de<br />
aplicatii in mecatronica si automatica se va putea majora, prin hotarare a Adunarii Generale, in<br />
functie de dezvoltarea activitatilor mentionate la art.6, art. 7 si art. 8, si prin sponzorizari din tara si<br />
strainatate, conform legilor in vigoare.<br />
16
Art. 11. Mijloacele financiare si materiale ale Platformei multimedia pentru instruire, cercetare<br />
si dezvoltare de aplicatii in mecatronica si automatica pot proveni din :<br />
a) drepturi cuvenite prin contractele de cercetare;<br />
b) taxe provenite din desfasurarea activitatilor de instruire, formare continua, reconversie<br />
profesionala, sau din organizarea de manifestari stiintifice etc.<br />
c) venituri realizate din activitati economice directe;<br />
d) dividendele eventualelor societati comerciale infiintate de asociatie;<br />
e) donatii, sponzorizari, legate;<br />
f) resurse obtinute de la bugetul de stat si / sau de la bugetele locale;<br />
g) alte venituri.<br />
Art. 12. Donatiile sau legatele pot fi sume de bani, bunuri, drepturi de autor, titluri de valoare sau alte<br />
drepturi. Donatiile si legatele vor fi inscrise in Registrul de Donatii al Asociatiei.<br />
Art. 13. Donatiile pot fi neconditionate sau conditionate de realizarea unui scop, daca acesta este in<br />
concordanta cu scopul general si activitatea Asociatiei.<br />
Art. 14. Asociatia poate refuza orice donatie sau legat oferite in termeni inacceptabili sau care<br />
contravin prezentului statut.<br />
CAPITOLUL 4 . Membrii asociatiei. Drepturi si obligatii<br />
Art. 15. Asociatia etse formata din membrii cercetatori specificati in tabelul 12.4 din propunerea de<br />
grant, si din aceia, eventual cooptati ulterior, in scopul desfasurarii activitatilor de la art.6,7 si 8 ale<br />
prezentului statut.<br />
Art. 16. Drepturile si obligatiile membrilor se executa numai in nume personal, fara imputernicire.<br />
Art. 17. Calitatea de membru se dobandeste la cerere, adresata Consiliul de Conducere si insotita de o<br />
declaratie de acceptare a prevederilor prezentului Statut.<br />
Art. 18. Calitatea de membru se pierde prin :<br />
a) renuntarea formala exprimata in scris de catre subiect;<br />
b) retragerea calitatii de membru cu votul majoritatii simple a Adunarii Generale.<br />
Membrii care se retrag sau carora li se retrage calitatea de membru nu au nici un drept asupra<br />
patrimoniului Platformei multimedia pentru instruire, cercetare si dezvoltare de aplicatii in<br />
mecatronica si automatica.<br />
CAPITOLUL 5 . Organizarea asociatiei<br />
Art. 19. Organele Platformei multimedia pentru instruire, cercetare si dezvoltare de<br />
aplicatii in mecatronica si automatica sunt :<br />
a) Adunarea Generala;<br />
b) Consiliul de Conducere;<br />
c) Directorul Platformei, care este si Directorul Consiliului de Conducere.<br />
Art. 20. Adunarea Generala este organul de conducere al asociatiei. Ea se compune din totalitatea<br />
membrilor. Competentele Adunarii Generale sunt :<br />
a) stabileste strategia si obiectivele generale ale Platformei;<br />
b) dezbate si aproba raportul de activitate al Consiliului de Conducere, realizarea<br />
bugetului de venituri si cheltuieli pe baza de bilant.<br />
c) aproba programul de activitate, strategiile si politica contractuala a Platformei;<br />
d) aproba modificarea Statutului;<br />
Art. 21. Adunarea Generala se convoaca de catre Directorul Platformei, intrunindu-se ori de cate ori<br />
este necesar.<br />
Art. 22. Hotararile luate de Adunarea Generala, in limitele legii, sunt obligatorii si pentru membrii<br />
care nu au fost prezenti sau care au votat impotriva.<br />
Art. 23. Consiliul de Conducere este ales de Adunarea Generala, din randul membrilor, pe o perioada<br />
de doi ani. Consiliul de Conducere este organul care pune in executare hotararile Adunarii Generale.<br />
Art. 24. Consiliul de Conducere se compune din: Directorul Platformei, Coordonator activitate<br />
programe formative, Coordonator activitate administrativa si membri.<br />
Art. 25. La infiintare, Consiliul de Conducere se compune din urmatoarele persoane:<br />
- prof. dr. ing. Mircea Ivanescu – Directorul Platformei<br />
- prof. dr. ing. Ilie Diaconu – Coordonator activitate programe formative<br />
- prof. dr. ing. Dorian Cojocaru – Coordonator activitate administrativa<br />
- prof. dr. ing. Matei Vinatoru – membru, reprezentant Scoala doctorala<br />
17
- prof. dr. ing. Dan Popescu – membru, reprezentant conducere facultate<br />
- conf. dr. ing. Dan Selisteanu - membru<br />
Art. 26. Asociatia este reprezentata de presedintele Consiliului de Conducere sau de imputernicitii sai.<br />
Art. 27. Consiliul de Conducere se intruneste lunar in sesiuni ordinare si in sesiuni extraordinare ori<br />
de cate ori este nevoie, fiind convocat de oricare dintre membrii sai.<br />
Art. 28. In cazul incetarii din orice motive a calitatii de membru al Consiliului de Conducere, locul<br />
vacant va fi ocupat prin alegerea unui alt membru in termen de 10 zile, prin votul Adunarii Generale.<br />
Art. 29. Gestiunea Platformei se tine in conformitate cu legislatia in vigoare, de catre Serviciul<br />
Financiar al Universitatii in Craiova.<br />
Art. 30. Operatiile financiare in cadrul Platformei se pot face numai cu semnatura directorului.<br />
CAPITOLUL 6 . Dispozitii finale<br />
Art. 31. Dizolvarea si lichidarea Platformei se pot face in cazurile prevazute de lege.<br />
Art. 32. Eventualele litigii ce ar aparea in timpul functionarii sau lichidarii se vor judeca, potrivit<br />
dreptului comun, de catre instantele competente.<br />
Art. 33. Modificarile sau completarile prezentului Statut se fac prin hotarari ale Adunarii Generale, in<br />
conditiile legii.<br />
Art. 34. Prevederile prezentului Statut se completeaza cu normele legale imperative cuprinse in<br />
legislatia in vigoare.<br />
Art. 42. Prezentul act constitutiv a fost aprobat azi, .........................., in Senatul Universitatii din<br />
Craiova.<br />
Rector,<br />
Prof. Dr. Ion Vladimirescu<br />
18
ANEXA B <strong>2006</strong><br />
Denumire imobilizare<br />
Numar<br />
inventar<br />
Gr.uzura<br />
Valoare<br />
de intrare<br />
Valoare<br />
ramasa<br />
Sursa de<br />
finantare<br />
NOTEBOOK HP NC 215082 0.1109 4435.13 3943.13 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215852 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215872 0.1244 3376.03 2956.03 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215873 0.1244 3376.03 2956.03 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215874 0.1244 3376.03 2956.03 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215875 0.1244 3376.03 2956.03 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215876 0.1244 3376.03 2956.03 Venituri proprii<br />
INSTALATIE CLIMATIZARE ARISTON 24912 0.6847 3486.57 1099.45 Venituri proprii<br />
INSTALATIE CLIMATIZARE ARISTON 24913 0.6847 3486.57 1099.45 Venituri proprii<br />
APARAT AER CONDITIONAT WHITE 25063 0.5884 1818.68 748.48 Venituri proprii<br />
CALCULATOR IBM PC 2-35SX 311330 1.0000 785.78 0.00 Venituri proprii<br />
CALCULATOR PC 2-35 SX 311331 1.0000 425.59 0.00 Venituri proprii<br />
TABLETE PROTECTIE 311334 1.0000 1912.26 0.00 Venituri proprii<br />
CALCULATOR INTEL PENTIUM DTK 312413 1.0000 914.93 0.00 Venituri proprii<br />
IMPRIMANTA HP 5L 1MB RAM 312474 1.0000 202.02 0.00 Venituri proprii<br />
IMPRIMANTA HP 5L 312475 1.0000 1559.62 0.00 Venituri proprii<br />
DTK PENTIUM 166MMX 312906 1.0000 1186.29 0.00 Venituri proprii<br />
CALCULATOR DTK P166 MMX 312909 1.0000 2751.22 0.00 Venituri proprii<br />
CALCULATOR DTK P166 MMX 312910 1.0000 2609.21 0.00 Venituri proprii<br />
IMPRIMANTA HP LJ 6L 313040 1.0000 346.78 0.00 Venituri proprii<br />
NET UPS 700VA 313597 1.0000 405.07 0.00 Venituri proprii<br />
NET UPS 700VA 313598 1.0000 405.07 0.00 Venituri proprii<br />
SCANNER ARTEC 313674 1.0000 167.73 0.00 Venituri proprii<br />
SUNIC 560 PIII 500MHZ DISP DSPACE 313716 1.0000 22401.65 0.00 Venituri proprii<br />
LASER PRINTER MINOLTA CS PRO 313717 1.0000 1009.14 0.00 Venituri proprii<br />
IMPRIMANTA HP LJ 1100A 314073 1.0000 1658.40 0.00 Venituri proprii<br />
VIDEOPROIECTOR CANON 320094 0.1163 4936.18 4362.18 Venituri proprii<br />
MASA PROIECTIE 616708 0.8358 179.45 29.46 Venituri proprii<br />
COPIATOR XEROX 5310 617376 1.0000 393.48 0.00 Venituri proprii<br />
RETROPROIECTOR 63184 1.0000 258.50 0.00 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215881 0.1244 3376.03 2956.03 Venituri proprii<br />
CIRCULAR PS 174 216210 1.0000 100.00 0.00 Venituri proprii<br />
TRUSA ELECTRONIST 217138 1.0000 47.58 0.00 Venituri proprii<br />
APARAT AER CONDITIONAT 24252 1.0000 969.74 0.00 Venituri proprii<br />
COMPRESOR MAGIC 650 2683 1.0000 104.68 0.00 Venituri proprii<br />
STATIE EDITARE TEXTE PAO EPSON 311320 1.0000 1412.78 0.00 Venituri proprii<br />
CALCULATOR DE PROCES 311321 1.0000 2921.78 0.00 Venituri proprii<br />
CALCULATOR IBM PC 235 SX 8535 311322 1.0000 1017.26 0.00 Venituri proprii<br />
TRASEUR SOUND SR II PLOTTER 311323 1.0000 146.26 0.00 Venituri proprii<br />
DIGITEZEUR CALCOM 33180 311325 1.0000 119.44 0.00 Venituri proprii<br />
DISC DUR ENTER 311326 1.0000 280.35 0.00 Venituri proprii<br />
PLACA ACHIZITIE PC 591/4 ARTAN 311327 1.0000 300.15 0.00 Venituri proprii<br />
CALCULATOR IBM PC 2-35 311328 1.0000 434.98 0.00 Venituri proprii<br />
CALCULATOR IBM PC R 35 311329 1.0000 711.53 0.00 Venituri proprii<br />
IMPRIMANTA STAR LL200 311332 1.0000 47.24 0.00 Venituri proprii<br />
TABLETE DE PROTECTIE 311333 1.0000 300.00 0.00 Venituri proprii<br />
SISTEM ACHIZITIE CASSY 311337 1.0000 436.30 0.00 Venituri proprii<br />
19
OSCILOSCOP OX 725 311338 1.0000 80.00 0.00 Venituri proprii<br />
IMPRIMANTA EPSON EPL 7500 311339 1.0000 387.97 0.00 Venituri proprii<br />
SCANNER EPSON GT 600174 311340 1.0000 284.66 0.00 Venituri proprii<br />
IMPRIMANTA LQ 1070 311344 1.0000 114.83 0.00 Venituri proprii<br />
ECRAN COLOR DISPLAY 311345 1.0000 57.76 0.00 Venituri proprii<br />
LECTOR LD ROOM PHILIPS 311346 1.0000 95.92 0.00 Venituri proprii<br />
DEBITMETRU DE LICHID 311586 1.0000 50.00 0.00 Venituri proprii<br />
BANC MASURARE DIDACTIC 311820 1.0000 906.50 0.00 Venituri proprii<br />
CALCULATOR IBM PS/VP COLOR 311821 1.0000 634.47 0.00 Venituri proprii<br />
PLACA FAX MODEM SAMANTHA 311822 1.0000 76.22 0.00 Venituri proprii<br />
PLACA FAX MODEM SAMANTHA 311823 1.0000 76.22 0.00 Venituri proprii<br />
IMPRIMANTA 24 AIG 136 COL 311824 1.0000 32.47 0.00 Venituri proprii<br />
INSTALATIE DISTILARE SUB VID 311851 1.0000 1000.00 0.00 Venituri proprii<br />
MODELE OPTOELECTRONICE 311924 1.0000 213.04 0.00 Venituri proprii<br />
ETUVA UNIVERSALA 311927 1.0000 100.00 0.00 Venituri proprii<br />
IMPRIMANTA HP DESKJET 311928 1.0000 119.52 0.00 Venituri proprii<br />
MODUL ACHIZITIE DATE 312570 1.0000 276.75 0.00 Venituri proprii<br />
MODUL ACHIZITIE DATE 312571 1.0000 276.75 0.00 Venituri proprii<br />
CALCULATOR DTK PENTIUM/ 1208 M 312715 1.0000 601.13 0.00 Venituri proprii<br />
CALCULATOR SPRINT PENTIUM 312742 1.0000 1296.53 0.00 Venituri proprii<br />
IMPRIMANTA HP LASER JET 312743 1.0000 559.78 0.00 Venituri proprii<br />
COMPUTER DTK PENTIUM 312911 1.0000 803.62 0.00 Venituri proprii<br />
COMPUTER DTK DUAL PENTIUM 313468 1.0000 5979.65 0.00 Venituri proprii<br />
COMPUTER DTK AMD K6 - 2/333 MHZ 313469 1.0000 4703.35 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313470 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313471 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313472 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313473 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333MHZ 313474 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313475 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK - AMD K6 - 2/333 MHZ 313476 1.0000 1196.33 0.00 Venituri proprii<br />
COMPUTER DTK DK 2/333 MHZ 313477 1.0000 1335.47 0.00 Venituri proprii<br />
COMPUTER DTK AM DK 2/333 313478 1.0000 1925.57 0.00 Venituri proprii<br />
TRIPOD SCREEN DATA PROFESSIONA 313498 1.0000 165.08 0.00 Venituri proprii<br />
LCD PANEL SVGA PROFESIONAL 313499 1.0000 1928.54 0.00 Venituri proprii<br />
WHITE BOARD STARTER KIT 313500 1.0000 248.68 0.00 Venituri proprii<br />
FUSION 3.0 WIN 95 INT 313501 1.0000 298.68 0.00 Venituri proprii<br />
DREAM WEAVER M2 WIN 313502 1.0000 295.61 0.00 Venituri proprii<br />
DIRECTOR MULTIMEDIA STUDIO 313503 1.0000 1478.07 0.00 Venituri proprii<br />
INSTALATIE REGLARE DEBIT TEMP 313536 0.7248 6492.83 1786.81 Venituri proprii<br />
NET UPS 700VA 313596 1.0000 405.07 0.00 Venituri proprii<br />
NET UPS 700VA 313599 1.0000 405.07 0.00 Venituri proprii<br />
DEBITMETRU DE AER 0.4 314333 1.0000 50.00 0.00 Venituri proprii<br />
DEBITMETRU DE AER 0.4 314334 1.0000 50.00 0.00 Venituri proprii<br />
TRADUCTOR PRESIUNE 1000 IMBAR 314335 1.0000 50.00 0.00 Venituri proprii<br />
APARAT APA DISTILATA 314336 1.0000 250.00 0.00 Venituri proprii<br />
PISTOL AER CALD CU REGULATOR 314337 1.0000 40.00 0.00 Venituri proprii<br />
REGULATOR DEBIT 4Q 0.22 314338 1.0000 150.00 0.00 Venituri proprii<br />
EVAPORATOR ROTATIV VERTICAL 314339 1.0000 400.00 0.00 Venituri proprii<br />
MASA PROIECTIE 616707 0.7693 40.05 9.24 Venituri proprii<br />
TABLA PROIECTIE ULMAN 616709 0.8493 150.00 22.61 Venituri proprii<br />
FAX OKIFAY 618304 1.0000 358.26 0.00 Venituri proprii<br />
20
MAGNETOSCOP VP 3119 63181 1.0000 77.01 0.00 Venituri proprii<br />
TELEVIZOR 6352 63182 1.0000 97.78 0.00 Venituri proprii<br />
RETROPROIECTOR RALLY 63183 1.0000 258.50 0.00 Venituri proprii<br />
STRUNG CU COMANDA NUMERICA 211817 1.0000 4420.79 0.00 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215843 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215844 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215845 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215846 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215847 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215848 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215849 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200, 215853 0.1243 2269.33 1987.33 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215879 0.1244 3376.03 2956.03 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3500, 215880 0.1244 3376.03 2956.03 Venituri proprii<br />
FRIGIDER 180L 217154 1.0000 537.00 0.00 Venituri proprii<br />
LECTOR ,LD ROM PHILIPS 311347 1.0000 95.92 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX TUNER TV CU 312273 1.0000 1031.48 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX TUNER TV CU 312274 1.0000 773.66 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX TUNER TV CU 312275 1.0000 773.66 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PLACA DE RETEA 312276 1.0000 420.50 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PLACA DE RETEA 312277 1.0000 420.50 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PLACA DE RETEA 312278 1.0000 420.50 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PENTIUM PLACA 312279 1.0000 702.74 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PENTIUM PLACA 312280 1.0000 628.49 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX PENTIUM PLACA 312281 1.0000 628.49 0.00 Venituri proprii<br />
CALCULATOR LOGIMAX 312282 1.0000 1275.10 0.00 Venituri proprii<br />
SOUND BLASTER PRO 32 BITI 312283 1.0000 68.28 0.00 Venituri proprii<br />
HP SCANJET 4C COLOR 312310 1.0000 260.39 0.00 Venituri proprii<br />
HP DESKJET 660C 312335 1.0000 123.88 0.00 Venituri proprii<br />
HP SCANJET 4C COLOR 312336 1.0000 298.85 0.00 Venituri proprii<br />
IMPRIMANTA HP LASERJET 5MP 312367 1.0000 409.17 0.00 Venituri proprii<br />
MODUL ACHIZITIE DMA AX5411 312572 1.0000 276.75 0.00 Venituri proprii<br />
IMPRIMANTA HP 5L LASERJET 312666 1.0000 493.01 0.00 Venituri proprii<br />
DTK PENTIUM 120 312716 1.0000 601.13 0.00 Venituri proprii<br />
BRIDGE LANTRONIX 312762 1.0000 2184.48 0.00 Venituri proprii<br />
TRANSCEIVER AUI THICK ETHERNET 312768 1.0000 140.60 0.00 Venituri proprii<br />
IMPRIMANTA HP LASERJET 6L A4 312782 1.0000 515.41 0.00 Venituri proprii<br />
IMPRIMANTA JET MINOLTA COLOR 312826 1.0000 164.34 0.00 Venituri proprii<br />
DTK PENTIUM 166 MMX 312904 1.0000 941.23 0.00 Venituri proprii<br />
DTK PENTIUM 166 MMX 312905 1.0000 941.23 0.00 Venituri proprii<br />
DTK PENTIUM 200MMX PLACA DE RETEA 312948 1.0000 23905.93 0.00 Venituri proprii<br />
HP LASERJET 6L 313051 1.0000 346.78 0.00 Venituri proprii<br />
HP SCANJET 610 C/A4 313262 1.0000 698.54 0.00 Venituri proprii<br />
CALCULATOR SPRINT COLOSSEUM 313395 1.0000 7303.12 0.00 Venituri proprii<br />
CALCULATOR SPRINT COLOSSEUM TUNER 313396 1.0000 4366.05 0.00 Venituri proprii<br />
CALCULATOR SPRINT COLOSSEUM TUNER 313397 1.0000 5406.97 0.00 Venituri proprii<br />
CALCULATOR SPRINT COLOSSEUM TUNER 313398 1.0000 3448.72 0.00 Venituri proprii<br />
SISTEM ROBOTI MOBLI MONDOTRONI 313463 1.0000 3085.02 0.00 Venituri proprii<br />
SISTEM ROBOTI MOBILI 313464 1.0000 11148.33 0.00 Venituri proprii<br />
CALCULATOR HP OHNIBOOK 4150 313637 1.0000 11424.16 0.00 Venituri proprii<br />
CALCULATOR HP OHNIBOOK 4150 313638 1.0000 7575.96 0.00 Venituri proprii<br />
CALCULATOR HP OHNIBOOK 4150 313639 1.0000 7575.96 0.00 Venituri proprii<br />
21
ROBOT CYE PACKAGE PORTOCALIU 313644 1.0000 3059.24 0.00 Venituri proprii<br />
STRUCTURA PACKET 313645 1.0000 7008.56 0.00 Venituri proprii<br />
STRUCTURA PACKET 313646 1.0000 7008.56 0.00 Venituri proprii<br />
POCKET BET KIT 313647 1.0000 3681.18 0.00 Venituri proprii<br />
POCKET BET KIT 313648 1.0000 3681.18 0.00 Venituri proprii<br />
RUGBAT SONOR KIT 313649 1.0000 3329.25 0.00 Venituri proprii<br />
RUGBAT SONOR KIT 313650 1.0000 729.25 0.00 Venituri proprii<br />
POLAROID SONOR ROMGING 313651 1.0000 604.70 0.00 Venituri proprii<br />
POLAROID SONOR ROMGING 313652 1.0000 604.70 0.00 Venituri proprii<br />
ROBOT CYE PACKAGE GALBEN 313653 1.0000 6259.24 0.00 Venituri proprii<br />
ROBOT CYE PACKAGE ROSU 313654 1.0000 6259.24 0.00 Venituri proprii<br />
SISTEM CONTROL ROBOTI MOBILI 313670 1.0000 1644.30 0.00 Venituri proprii<br />
SISTEM COMUNICATIE ROBOTI 313671 1.0000 2028.73 0.00 Venituri proprii<br />
STARTER SISTEM AUTOMAT 314168 0.5257 2747.44 1303.12 Venituri proprii<br />
CAMERA VIDEO JVC GRAY 460 34200 1.0000 1153.98 0.00 Venituri proprii<br />
RETROPROIECTOR LIESEGANG 629 612162 1.0000 188.02 0.00 Venituri proprii<br />
TELEFAX BELL PHONES 617368 1.0000 130.40 0.00 Venituri proprii<br />
COPIATOR CANON NP 1550 CU TONE 617385 1.0000 653.89 0.00 Venituri proprii<br />
COPIATOR CANON NP 1550 617386 1.0000 653.89 0.00 Venituri proprii<br />
TELEVIZOR "NEI" E14D4X 618293 1.0000 273.69 0.00 Venituri proprii<br />
COPIATOR MINOLTA EP 1052 618314 1.0000 969.98 0.00 Venituri proprii<br />
MANUAL 619027 0.4784 534.54 278.79 Venituri proprii<br />
TELEVIZOR 6352 63214 1.0000 97.78 0.00 Venituri proprii<br />
MAGNETOSCOP VP 3119 63215 1.0000 77.01 0.00 Venituri proprii<br />
PLACA VIDEO CYCLOPE II 63353 1.0000 311.93 0.00 Venituri proprii<br />
CAMERA VHP 63354 1.0000 222.55 0.00 Venituri proprii<br />
UNITATE COMPUTERIZATA+CONVEIOR 312030 1.0000 3764.33 0.00 Venituri proprii<br />
UNITATE DIDACTICA COMPUTERIZAT 312041 1.0000 5407.55 0.00 Venituri proprii<br />
CALCULATOR HP VECTRA 312063 1.0000 534.19 0.00 Venituri proprii<br />
CALCULATOR HP VECTRA 312079 1.0000 257.09 0.00 Venituri proprii<br />
CALCULATOR HP VECTRA 312089 1.0000 276.46 0.00 Venituri proprii<br />
MASINA UNEALTA CNC 312151 1.0000 10018.78 0.00 Venituri proprii<br />
CALCULATOR PHOENIX PENTIUM 200 312898 1.0000 1865.45 0.00 Venituri proprii<br />
CALCULATOR PHOENIX PENTIUM 200 312899 1.0000 1529.37 0.00 Venituri proprii<br />
IOMEGA ZIP EXT 100MB 312900 1.0000 225.66 0.00 Venituri proprii<br />
PRINTER HP LASERJET 6L 312901 1.0000 474.01 0.00 Venituri proprii<br />
PRINTER HP DESKJET 670C 312902 1.0000 231.33 0.00 Venituri proprii<br />
CALCULATOR DTK PENTIUM CMR MUSTEK 313434 1.0000 2685.74 0.00 Venituri proprii<br />
CALCULATOR DTK PENTIUM 313435 1.0000 1241.36 0.00 Venituri proprii<br />
CALCULATOR DTK PENTIUM 313436 1.0000 1286.82 0.00 Venituri proprii<br />
COMPUTER DTK PENTIUM 313437 1.0000 1535.10 0.00 Venituri proprii<br />
IMPRIMANTA HP LASERJET IV P 313481 1.0000 941.86 0.00 Venituri proprii<br />
ROBOT IRO 14001498 313710 1.0000 50319.79 0.00 Venituri proprii<br />
SOFTWARE ROBOT 313711 1.0000 9614.01 0.00 Venituri proprii<br />
CALCULATOR COMRACE 313712 1.0000 1665.00 0.00 Venituri proprii<br />
CALCULATOR COMRACE 313713 1.0000 1665.00 0.00 Venituri proprii<br />
IMPRIMANTA HP LASERJET 313714 1.0000 950.00 0.00 Venituri proprii<br />
CALCULATOR COMRACE MAGNUM P4 314511 1.0000 99.22 0.00 Venituri proprii<br />
RETROPROIECTOR M9700 612626 1.0000 1053.38 0.00 Venituri proprii<br />
TELEFAX UX-108 618768 1.0000 367.48 0.00 Venituri proprii<br />
COPIATOR SF 22220 618769 1.0000 1781.75 0.00 Venituri proprii<br />
SONY VIDEO RECORDER E80 619364 1.0000 1160.50 0.00 Venituri proprii<br />
22
SONY VIDEOCAMERA 619365 1.0000 6000.00 0.00 Venituri proprii<br />
SISTEM ELSACO ATHLON 64 3700. 215145 0.0208 3613.80 3538.80 Venituri proprii<br />
SISTEM ELSACO ATHLON 64 215146 0.0208 3613.80 3538.80 Venituri proprii<br />
VENTILATOR VF 355 24105 1.0000 23.12 0.00 Venituri proprii<br />
APARAT CONDITIONARE AER ASIBER 24149 1.0000 283.57 0.00 Venituri proprii<br />
APARAT CONDITIONARE AER ASIBER 24150 1.0000 283.57 0.00 Venituri proprii<br />
SISTEM PIROSTOPIC 24152 1.0000 5663.50 0.00 Venituri proprii<br />
LAMPI CAMERA UNOMAT 24370 1.0000 485.31 0.00 Venituri proprii<br />
LAMPI CAMERA UNOMAT 24371 1.0000 485.31 0.00 Venituri proprii<br />
MIXER AUDIO 24380 0.7000 4139.80 1241.92 Venituri proprii<br />
UNOMAT NI-CD MODULE 1'128 24409 0.6754 220.82 71.67 Venituri proprii<br />
UNOMAT NI-CD MODULE 1'128 24410 0.6754 220.82 71.67 Venituri proprii<br />
UNOMAT NI-CD MODULE 1'128 24411 0.6754 220.82 71.67 Venituri proprii<br />
UNOMAT NI-CD MODULE 1'128 24412 0.6754 220.82 71.67 Venituri proprii<br />
UNOMAT DC 9020 MODULE 217 24413 0.6696 466.77 154.24 Venituri proprii<br />
UNOMAT DC 9020 MODULE 217 24414 0.6696 466.77 154.24 Venituri proprii<br />
UNOMAT SPARE ACCU 7AN/12938 24415 0.6442 154.94 55.12 Venituri proprii<br />
UNOMAT SPARE ACCU 7AN/12938 24416 0.6442 154.94 55.12 Venituri proprii<br />
UNOMAT SPARE ACCU 7AN/12938 24417 0.6442 154.94 55.12 Venituri proprii<br />
UNOMAT SPARE ACCU 7AN/12938 24418 0.6442 154.94 55.12 Venituri proprii<br />
APARAT AER CONDITIONAT WHITE 25054 0.5876 3850.18 1587.67 Venituri proprii<br />
MICROFON CU LAVALIERA KIR, FIR 25146 0.4870 1074.02 550.93 Venituri proprii<br />
MICROFON CU LAVALIERA KIR, FIR 25147 0.4870 1074.02 550.93 Venituri proprii<br />
PUPITRU DE MIXAJ VIDEO PANASONIC 25195 0.3053 19540.40 13574.46 Venituri proprii<br />
IMPRIMANTA HP LASERJET 5L 312322 1.0000 177.02 0.00 Venituri proprii<br />
DTK PENTIUM 200MMX PINACLE STUDIO 312951 1.0000 3550.85 0.00 Venituri proprii<br />
CALCULATOR PC ESCORT PRESTIGE 313486 1.0000 8315.85 0.00 Venituri proprii<br />
CD WRITER YAMAHA 4/4116 313563 1.0000 975.68 0.00 Venituri proprii<br />
CALCULATOR HDD 100 GB 313703 1.0000 2749.96 0.00 Venituri proprii<br />
URS 1000 VA 313792 1.0000 545.19 0.00 Venituri proprii<br />
SOFTWARE ADABE PREMIERE 313793 1.0000 1041.80 0.00 Venituri proprii<br />
SOFTWARE ADABE PREMIERE 313794 1.0000 1041.80 0.00 Venituri proprii<br />
UPS 2000 VA 314061 1.0000 1356.38 0.00 Venituri proprii<br />
MB MICROSTAR MS6167/ATX,CPU 314118 1.0000 6304.50 0.00 Venituri proprii<br />
CAMERA VIDEO DIGITALA PANASONIC 320107 0.1165 6308.69 5573.69 Venituri proprii<br />
CAMERA VIDEO PANASONIC 3 CCD 320230 0.0167 5641.79 5547.79 Venituri proprii<br />
FISET METALIC CU SEIF 617130 0.7150 31.89 9.09 Venituri proprii<br />
FISET METALIC CU SEIF 617131 0.7150 31.89 9.09 Venituri proprii<br />
TELEFAX BELL PHONES 617369 1.0000 130.40 0.00 Venituri proprii<br />
TELEVIZOR "NEI" E14D4X 618292 1.0000 273.69 0.00 Venituri proprii<br />
F24 TRIPOD PSV 303 618310 1.0000 262.85 0.00 Venituri proprii<br />
TELEVIZOR COLOR E 20 "NEI 618352 1.0000 286.99 0.00 Venituri proprii<br />
AMPLIFICATOR TV KBU 150 618847 1.0000 22380.00 0.00 Venituri proprii<br />
TV SONY KV14T1K 619375 1.0000 612.30 0.00 Venituri proprii<br />
TV SONY KV21T1K 619376 1.0000 720.68 0.00 Venituri proprii<br />
RECEIVER DIGITAL HUMAX 619377 1.0000 918.80 0.00 Venituri proprii<br />
CAMERA DIGITALA SONY DCR TRV6 619379 1.0000 5358.00 0.00 Venituri proprii<br />
CAMERA VIDEO DIGITALA 619382 1.0000 5811.00 0.00 Venituri proprii<br />
CAMERA SONY TRV 16E-DIGITALA 619943 0.7482 3906.24 983.56 Venituri proprii<br />
VIDEO SONY DHR -1000VC COMPATIBIL 619947 0.7319 15248.24 4087.73 Venituri proprii<br />
SISTEM RECEPTIE SATELIT MOBIL 64106 1.0000 83.01 0.00 Venituri proprii<br />
VIDEORECORDER JVC 64155 1.0000 705.96 0.00 Venituri proprii<br />
23
CAMERA VIDEO SVHS PANASONIC 64157 1.0000 1023.92 0.00 Venituri proprii<br />
CAMERA VIDEO SVHS PANASONIC 64158 1.0000 1023.92 0.00 Venituri proprii<br />
ANTENA PARABOLICA D2.6MM AL 64242 1.0000 391.47 0.00 Venituri proprii<br />
IMPRIMANTA HP LJ 1100 313606 1.0000 603.95 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313884 1.0000 3098.35 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313885 1.0000 3098.35 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313886 1.0000 3098.35 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313887 1.0000 3098.35 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313888 1.0000 1606.78 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313889 1.0000 1606.78 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313890 1.0000 1606.78 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313901 1.0000 2640.37 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313902 1.0000 2234.81 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313903 1.0000 2090.37 0.00 Venituri proprii<br />
STATIE LUCRU DTK 313904 1.0000 1730.53 0.00 Venituri proprii<br />
IMPRIMANTA HP LJ 1100 2 MB 313940 1.0000 986.86 0.00 Venituri proprii<br />
MASINA COPIAT RICOM PRI PORT 212833 0.8039 13001.89 2549.28 Venituri proprii<br />
ECHIPAMENT MULTIPLICARE ALCATE 24151 0.9926 8352.77 62.02 Venituri proprii<br />
GHILOTINA IDEAL 7228 EC 3 25068 0.2949 40375.98 28468.09 Venituri proprii<br />
GHILOTINA PT.TAIAT HARTIE 4850-95 25070 0.2884 18736.91 13333.33 Venituri proprii<br />
COPIATOR XEROX DC 425,DC425ST,NAT 25080 0.3408 31335.70 20657.77 Venituri proprii<br />
IMPRIMANTA DOCU COLOR 12LP,MARCA 25082 0.3410 89309.70 58858.28 Venituri proprii<br />
MASIUNA DE LEGAT CARTI PRIN 25088 0.3333 24830.37 16554.89 Venituri proprii<br />
CALCULATOR PC SYPERLINE X3200,CPU 215942 0.1242 1980.16 1734.16 Venituri proprii<br />
TOTAL VENITURI 824468.75 240044.85<br />
CALCULATOR UC PS/2 310512 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310513 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310514 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310515 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310516 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310517 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310518 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310519 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310520 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310521 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310522 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310523 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310524 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310525 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310526 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310527 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310528 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310529 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310530 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310531 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310532 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310533 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310534 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310535 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310536 1.0000 9.89 0.00 Buget<br />
CALCULATOR UC PS/2 310537 1.0000 9.89 0.00 Buget<br />
DULAP METAL 609768 1.0000 0.10 0.00 Buget<br />
24
MESE LABORATOR 615755 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615756 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615757 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615758 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615759 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615760 1.0000 45.40 0.00 Buget<br />
MESE LABORATOR 615761 1.0000 45.40 0.00 Buget<br />
MASA LABORATOR 615762 1.0000 45.40 0.00 Buget<br />
CONVERTOR TENSIUNE 200078 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204123 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204125 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204130 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204131 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204134 1.0000 0.19 0.00 Buget<br />
CONVERTOR TENSIUNE 204346 1.0000 0.19 0.00 Buget<br />
CONVERTOR ELA 104 204432 1.0000 0.17 0.00 Buget<br />
CONVERTOR ELA 104 204434 1.0000 0.17 0.00 Buget<br />
CONVERTOR ELA 104 204435 1.0000 0.17 0.00 Buget<br />
CONVERTOR ELA 104 204446 1.0000 0.17 0.00 Buget<br />
CONVERTOR ELA 104 204447 1.0000 0.17 0.00 Buget<br />
GENERATOR JOASA FRECVENTA 6050 208922 0.9513 100.00 4.87 Buget<br />
STRUNG CEM 90 21107 1.0000 2.09 0.00 Buget<br />
APARAT FOTO PRACTICA 21947 1.0000 0.60 0.00 Buget<br />
ELEMENT RAPORT ELX 126R 300096 1.0000 0.50 0.00 Buget<br />
INTEGRATOR ELJ 103 300130 1.0000 1.09 0.00 Buget<br />
REGULATOR ELC 113 300246 1.0000 1.90 0.00 Buget<br />
REGULATOR ELC 113 303774 1.0000 1.29 0.00 Buget<br />
TRADUCTOR TENSIUNE 303776 1.0000 1.03 0.00 Buget<br />
ELEMENT DE REFERINTA 304350 1.0000 0.19 0.00 Buget<br />
REGULATOR ELC 113 304610 1.0000 0.86 0.00 Buget<br />
REGULATOR ELC 113 304611 1.0000 0.86 0.00 Buget<br />
SURSA TENSIUNE 304771 1.0000 0.77 0.00 Buget<br />
INREGISTRATOR E 462 304836 1.0000 0.91 0.00 Buget<br />
REGULATOARE ELC 113 304849 1.0000 0.67 0.00 Buget<br />
TRADUCTOR FEIGM 305129 1.0000 1.15 0.00 Buget<br />
ELEMENT DE ADUNARE ELX 210 305554 1.0000 0.68 0.00 Buget<br />
TRADUCTOR FE 3 DL 305574 1.0000 0.79 0.00 Buget<br />
TRADUCTOR FE 3 DL 305576 1.0000 1.34 0.00 Buget<br />
MULTIMETRU NUMERIC E 0302 306035 1.0000 2.68 0.00 Buget<br />
OSCILOSCOP E 0102 306163 1.0000 3.25 0.00 Buget<br />
ELEMENT INMULTIRE ELY 307051 1.0000 0.58 0.00 Buget<br />
POZITIONER PNEUMATIC 307799 1.0000 0.16 0.00 Buget<br />
REGULATOR INREGISTRATOR ELC 13 307847 1.0000 0.87 0.00 Buget<br />
MINISCOP E 0104 M 308212 1.0000 3.16 0.00 Buget<br />
MOUSE PS/2 310639 1.0000 0.94 0.00 Buget<br />
MOUSE PS/2 310640 1.0000 0.94 0.00 Buget<br />
MOUSE PS/2 310641 1.0000 0.94 0.00 Buget<br />
MOUSE PS/2 310642 1.0000 0.94 0.00 Buget<br />
TRADUCTOR NIVEL 314341 1.0000 1.27 0.00 Buget<br />
OSCILOSCOP TSS 101 319214 1.0000 2.50 0.00 Buget<br />
MAGNETOFON TESLA 61475 1.0000 0.64 0.00 Buget<br />
MASA LABORATOR 615701 1.0000 40.40 0.00 Buget<br />
25
MASA LABORATOR 615702 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615703 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615704 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615705 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615706 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615707 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615708 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615709 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615710 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615711 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615712 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615713 1.0000 40.40 0.00 Buget<br />
MASA LABORATOR 615714 1.0000 40.40 0.00 Buget<br />
APARAT MARIT KROCUS 61948 1.0000 0.67 0.00 Buget<br />
MULTISTANBILIZATOR 305725 1.0000 0.84 0.00 Buget<br />
MULTIMETRU MF 35 307093 1.0000 0.30 0.00 Buget<br />
SISTEM CONTROLER CU SIMULATOR 309542 1.0000 41.91 0.00 Buget<br />
SISTEM CONTROLER CU SIMULATOR 309543 1.0000 41.91 0.00 Buget<br />
PC3/11 ORDINATEUR 309590 1.0000 16.00 0.00 Buget<br />
UCP UNITE DE COMANDE 309594 1.0000 10.81 0.00 Buget<br />
UNITE DE PROGRAME 309601 1.0000 7.52 0.00 Buget<br />
PC 31C ORDINATEUR 309603 1.0000 21.16 0.00 Buget<br />
CALCULATOR DELL 333 S/L 311665 1.0000 113.44 0.00 Buget<br />
CALCULATOR DELL 333 S/L 311739 1.0000 102.01 0.00 Buget<br />
TOTAL BUGET 1680.38 4.87<br />
PROGRAM PENTRU PLACUTE CALCULATOR 215512 0.2007 199.30 159.30<br />
Sponsorizaridonatii<br />
SISTEM DE CALCUL P4,2GHZ,INTEL 315175 1.0000 3976.36 0.00<br />
Sponsorizaridonatii<br />
TOTAL SPONSORIZARI-DONATII 4175.66 159.30<br />
SISTEM DE CALCUL 215138 0.0208 3120.84 3055.84 Cercetare<br />
CALCULATOR PORTABIL FSC AMILO PRO 215519 0.2492 3033.77 2277.77 Cercetare<br />
CALCULATOR PORTABIL HP NC 215584 0.1939 4403.38 3549.38 Cercetare<br />
PACHET SOFTWARE FLUID SIM 3.6 215693 0.1000 3690.21 3321.21 Cercetare<br />
NOTEBOOK HP PRESARIO, 315360 0.6107 4298.28 1673.31 Cercetare<br />
NOTEBOOK PAVILION,SERIE: 315361 0.6113 3993.64 1552.30 Cercetare<br />
NOTEBOOK PAVILION,SERIE: 315362 0.6113 3993.64 1552.30 Cercetare<br />
CALCULATOR KINETIX V.8 315385 0.5281 3080.67 1453.65 Cercetare<br />
VIDEOPROIECTOR BENQ MP 320232 0.0139 3894.79 3840.79 Cercetare<br />
VIDEOPROIECTOR CANON LVS 3, 620074 0.3663 4809.98 3048.32 Cercetare<br />
SISTEM DE CALCUL P4,2GHZ,INTEL 315175 1.0000 354.62 0.00 Cercetare<br />
NOTEBOOK FUJITSU AMILOL P4 2,8 315357 0.6104 4942.07 1925.27 Cercetare<br />
SISTEM DE CALCUL 215137 0.0208 3120.85 3055.85 Cercetare<br />
CALCULATOR INTEL P4 3 GHZ.SK478, 215463 0.2918 2494.72 1766.77 Cercetare<br />
NOTEBOOK AMILO PRO V2020 215483 0.3340 3916.29 2608.29 Cercetare<br />
CALCULATOR PORTABIL FSC AMILO PRO 215515 0.2508 2288.33 1714.33 Cercetare<br />
CALCULATOR PORTABIL HP COMPAQ 215540 0.2499 6446.58 4835.58 Cercetare<br />
CALCULATOR PORTABIL HP NX 8220, 215558 0.1944 6410.53 5164.53 Cercetare<br />
CALCULATOR PORTABIL HP NX 8220, 215559 0.1944 6410.53 5164.53 Cercetare<br />
NOTEBOOK HP COMPAQ NX 215560 0.1948 6180.86 4976.86 Cercetare<br />
CALCULATOR PC SYPERLINE, 215561 0.1457 3239.18 2767.18 Cercetare<br />
CALCULATOR PC SYPERLINE, 215562 0.1457 3239.18 2767.18 Cercetare<br />
CALCULATOR PC SYPERLINE, 215563 0.1457 3239.18 2767.18 Cercetare<br />
26
CALCULATOR PC SYPERLINE, 215564 0.1457 3239.18 2767.18 Cercetare<br />
CALCULATOR PC SYPERLINE, 215565 0.1457 3239.18 2767.18 Cercetare<br />
CALCULATOR PC SYPERLINE, 215566 0.1457 3239.18 2767.18 Cercetare<br />
UNITATE CENTRALA ULTRA, 215578 0.1470 2380.18 2030.18 Cercetare<br />
SISTEM DE DEITARE VIDEO PINACLE 215582 0.1465 3582.41 3057.41 Cercetare<br />
SISTEM DE ACTIONARE , 215583 0.1168 2995.97 2645.97 Cercetare<br />
OSCILOSCOP HAMEG 215613 0.0552 5546.42 5240.42 Cercetare<br />
CALCULATOR, 215691 0.1255 1864.57 1630.57 Cercetare<br />
CALCULATOR, 215692 0.1255 1864.58 1630.58 Cercetare<br />
LAMINATOR MAXIPLAST 320 24893 0.4242 1863.30 1072.95 Cercetare<br />
APARAT AER CONDITIONAT 2000 B 24909 0.6835 2600.00 822.97 Cercetare<br />
APARAT AER CONDITIONAT 2000 B 24910 0.6835 2600.00 822.97 Cercetare<br />
OSCILOSCOP TEKTRONIX 314563 0.4582 14564.14 7891.33 Cercetare<br />
SURSA TENSIUNE PROGRAMABILA 314564 0.4590 1741.76 942.33 Cercetare<br />
SURSA TENSIUNE PROGRAMABILA 314565 0.4590 1741.76 942.33 Cercetare<br />
CALCULATOR PIV, MB INTEL 865 P4 315203 1.0000 4088.31 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315204 1.0000 3639.59 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315205 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315206 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315207 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315208 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315209 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315210 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315211 1.0000 2958.85 0.00 Cercetare<br />
CALCULATOR PIV, MB INTEL 845 P4 315212 1.0000 2958.85 0.00 Cercetare<br />
NOTEBOOK FUJITSU AMILOL,SERIE: 315336 0.6944 3834.03 1171.52 Cercetare<br />
NOTEBOOK FUJITSU AMILOL,SERIE: 315337 0.6944 3834.03 1171.52 Cercetare<br />
NOTEBOOK FUJITSU AMILOL,SERIE: 315338 0.6944 3834.03 1171.52 Cercetare<br />
NOTEBOOK FUJITSU AMILOL,SERIE: 315339 0.6944 3834.03 1171.52 Cercetare<br />
CALCULATOR ELSACO PANTHER PENTIUM 315341 0.6666 2934.45 978.30 Cercetare<br />
CALCULATOR ELSACO PANTHER P4 2.8 315342 0.6666 2790.13 930.09 Cercetare<br />
POCKET PC FUJITSU LOOX 610 BT/ 315343 0.6670 3766.83 1254.22 Cercetare<br />
VIDEOPROIECTOR BENQ PB 320108 0.1166 4320.89 3816.89 Cercetare<br />
CAMERA VIDEO JVC GR D 290, 320113 0.0994 2414.47 2174.47 Cercetare<br />
VIDEOPROIECTOR BENQ MP 320233 0.0139 3894.78 3840.78 Cercetare<br />
ROBOT, MAX 96 ROUND BASE,SUPORT 215416 0.2359 4254.00 3250.58 Cercetare<br />
NORTON ANTIVIRUS NAV 2005 FOR WIN 215539 0.1495 240.75 204.75 Cercetare<br />
CALCULATOR AVANGARDE TIP5, 215542 0.1864 2220.80 1806.80 Cercetare<br />
CALCULATOR COMRACE MAGNUM P4 314511 1.0000 444.33 0.00 Cercetare<br />
IMPRIMANTA HP 1005 W,SERIE:CHBF 315289 0.8341 918.99 152.50 Cercetare<br />
IMPRIMANTA HP LASER JET 1300, 315321 0.8050 1586.51 309.33 Cercetare<br />
NOTEBOOK FUJITSU AMILOL P4 2,8 315358 0.6104 4942.07 1925.27 Cercetare<br />
CAMERA WEB AXIS 210 315372 0.5544 2101.00 936.11 Cercetare<br />
CAMERA WEB AXIS 210 PT.RETEA, 315373 0.5544 2101.00 936.11 Cercetare<br />
CAMERA WEB AXIS 210 PT.RETEA, 315374 0.5544 2101.00 936.11 Cercetare<br />
PALM ZIRE 72+MICRONET SP3150 USB 315379 0.5285 1856.13 875.22 Cercetare<br />
CAMERA VIDEO DIGITALA DVD SONY 620078 0.3291 5679.87 3810.84 Cercetare<br />
CAMERA VIDEO DIGITALA DVD SONY 620079 0.3291 5679.87 3810.84 Cercetare<br />
TOTAL CERCETARE 244647.44 138505.26<br />
CALCULATOR PC SYPERLINE X3200, 216022 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216023 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
27
CALCULATOR PC SYPERLINE X3200, 216024 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216025 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216026 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216027 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216028 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216029 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216030 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216031 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216032 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216033 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216034 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216035 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216036 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216037 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216038 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216039 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216040 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216041 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216042 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216043 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216044 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216045 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216046 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216048 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216049 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216050 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216051 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216052 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216053 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216054 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216055 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216056 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216057 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216058 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216059 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216060 0.1243 2269.33 1987.33<br />
CALCULATOR PC SYPERLINE X3200, 216061 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
Finantare<br />
complementara<br />
28
CALCULATOR PC SYPERLINE X3200, 216062 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
CALCULATOR PC SYPERLINE X3200, 216063 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
CALCULATOR PC SYPERLINE X3200, 216064 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
CALCULATOR PC SYPERLINE X3200, 216065 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
CALCULATOR PC SYPERLINE X3200, 216066 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
CALCULATOR ALPIS PLATINIUM PIV, 315090 1.0000 2706.67 0.00<br />
Finantare<br />
complementara<br />
CALCULATOR ALPIS PLATINIUM PIV, 315091 1.0000 2706.67 0.00<br />
Finantare<br />
complementara<br />
IMPRIMANTA HP LJ 1200, SERIE SM 315165 1.0000 1446.13 0.00<br />
Finantare<br />
complementara<br />
SISTEM DE CONDUERE CU AUTOMATE 314617 0.4501 68360.97 37594.63<br />
Finantare<br />
complementara<br />
SISTEM DE FABRICATIE INTEGRAT 314618 0.4497 13607.45 7488.84<br />
Finantare<br />
complementara<br />
CALCULATOR ALPIS PLATINIUM PIV, 315093 1.0000 2706.67 0.00<br />
Finantare<br />
complementara<br />
CALCULATOR ELSACO PANTHER 2,4 315304 0.8330 6233.52 1040.76<br />
Finantare<br />
complementara<br />
NOTEBOOK ELSACO CQ12, 2,8 315287 0.8334 5993.40 998.70<br />
Finantare<br />
complementara<br />
EMITATOR TV-SCE 100 U-T, BANDA 25093 0.2639 9652.08 7105.34<br />
Finantare<br />
complementara<br />
CALCULATOR ALPIS PLATINIUM PIV, 315150 1.0000 2706.67 0.00<br />
Finantare<br />
complementara<br />
CALCULATOR ELSACO PANTHER 2,4 315305 0.8329 2637.10 440.55<br />
Finantare<br />
complementara<br />
VIDEORECORDER DIGITAL 619900 0.8000 15812.00 3162.14<br />
Finantare<br />
complementara<br />
CAMERA VIDEO SONY DCR TRV15 619919 0.7996 4220.00 845.67<br />
Finantare<br />
complementara<br />
CALCULATOR PC SYPERLINE X3200, 216047 0.1243 2269.33 1987.33<br />
Finantare<br />
complementara<br />
IMPRIMANTA HP LJ 315315 0.8335 5424.90 903.45<br />
Finantare<br />
complementara<br />
TOTAL FINANTARE COMPLEMENTARA 246334.08 149009.93<br />
CALCULATOR COMPAQ EVO 314603 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314604 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314605 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314606 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314607 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314608 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314609 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314610 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314611 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314612 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314613 1.0000 3005.03 0.00 Banca Mondiala<br />
CALCULATOR COMPAQ EVO 314614 1.0000 3005.03 0.00 Banca Mondiala<br />
SOFT WIN CON 3.2 FOR WINDOWS98 314738 1.0000 2168.86 0.00 Banca Mondiala<br />
EXPERMENT LABORATOR,COMPUS DIN 314741 0.8169 10010.10 1833.20 Banca Mondiala<br />
CAMERA VIDEO DIGITALA,SONY,MODEL 25029 0.5006 3371.21 1683.75 Banca Mondiala<br />
APARAT AER CONDITIONAT ANW 18 25078 0.5830 2799.99 1167.68 Banca Mondiala<br />
CALCULATOR COMRACE TROPHY HDD 314580 1.0000 1955.45 0.00 Banca Mondiala<br />
CALCULATOR PC PORTABIL HEWLETT 314581 1.0000 10167.63 0.00 Banca Mondiala<br />
HP LASERJET 1220 314582 1.0000 1766.30 0.00 Banca Mondiala<br />
SOFT-LABVIEW/PCI-MIO-16-E1 314915 1.0000 17312.03 0.00 Banca Mondiala<br />
CALCULATOR FUJITSU-SIEMENS TI845 314932 1.0000 7922.27 0.00 Banca Mondiala<br />
VIDEOPROIECTOR TOSHIBA TLP 560 619953 0.7835 12397.01 2684.42 Banca Mondiala<br />
VIDEOPROIECTOR CANON LV 7 24883 0.6333 22616.18 8294.30 Banca Mondiala<br />
29
APARAT FOTO CANON PS30,3,2M 24951 0.5046 3603.59 1785.24 Banca Mondiala<br />
APARAT FOTO CANON PS30,3,2M 24952 0.5046 3603.59 1785.24 Banca Mondiala<br />
COMPRESOR DE AER CU ULEI,PRESIUNE 24953 0.3693 866.53 546.49 Banca Mondiala<br />
APARAT AER CONDITIONAT 24000 BTU 24954 0.6338 4249.32 1555.95 Banca Mondiala<br />
CAMERA VIDEO DIGITALA CANON MV 24955 0.5207 4999.20 2395.89 Banca Mondiala<br />
APARAT AER CONDITIONAT 24000 BTU 24962 0.6338 4249.32 1555.95 Banca Mondiala<br />
APARAT AER CONDITIONAT 24000 BTU 24963 0.6338 4249.32 1555.95 Banca Mondiala<br />
APARAT AER CONDITIONAT 12000 BTU 24971 0.6138 2710.00 1046.47 Banca Mondiala<br />
APARAT AER CONDITIONAT 12000 BTU 25003 0.6138 2710.00 1046.47 Banca Mondiala<br />
FRIGIDER ARTIC 25077 0.5176 991.35 478.22 Banca Mondiala<br />
SISTEM ROBOTI MOBILI, MOVING TEST 314014 0.5581 7017.15 3100.96 Banca Mondiala<br />
CALCULATOR COMRACE ELITE XP785 314025 1.0000 18230.00 0.00 Banca Mondiala<br />
CALCULATOR 314152 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314153 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314154 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314155 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314156 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314157 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314158 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314159 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR 314160 1.0000 3222.77 0.00 Banca Mondiala<br />
CALCULATOR, TABLETA DIGITIZOARE 314161 1.0000 4360.95 0.00 Banca Mondiala<br />
CALCULATOR,TABLETA DIGITIZOARE 314162 1.0000 4360.95 0.00 Banca Mondiala<br />
CALCULATOR, TABLETA DIGITIZOARE 314163 1.0000 3977.47 0.00 Banca Mondiala<br />
CALCULATOR 314164 1.0000 3631.07 0.00 Banca Mondiala<br />
CALCULATOR 314165 1.0000 3631.07 0.00 Banca Mondiala<br />
CALCULATOR 314166 1.0000 3631.07 0.00 Banca Mondiala<br />
CALCULATOR 314167 1.0000 3933.13 0.00 Banca Mondiala<br />
ROBOT SYSTEM 314510 0.4831 30735.88 15887.14 Banca Mondiala<br />
CALCULATOR ACER VERITON FP2 314525 1.0000 11215.04 0.00 Banca Mondiala<br />
CALCULATOR(LAPTOP)ACER TRAVEL 314526 1.0000 7711.06 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200 314544 1.0000 1618.65 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200 314545 1.0000 1618.65 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200 314546 1.0000 1618.65 0.00 Banca Mondiala<br />
CALCULATOR PC PENTIUM III :HDD 314547 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III :IGB INTEL,HDD 314548 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III:1 GB INTEL,HDD 314549 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III 1 GB INTEL,HDD 314550 1.0000 3514.06 0.00 Banca Mondiala<br />
CALCULATOR PC PENTIUM III :HDD 314551 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III 1 GB INTEL,HDD 314552 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III 1 GB INTEL,HDD 314553 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III 1 GB INTEL,HDD 314554 1.0000 3514.06 0.00 Banca Mondiala<br />
PC PENTIUM III 1 GB INTEL,HDD 314555 1.0000 3514.06 0.00 Banca Mondiala<br />
AUTOMAT PROGRAMABIL VERSAMAX 314556 1.0000 4118.78 0.00 Banca Mondiala<br />
SISTEM INTEGRAT DE TRANSPORT SI 314619 0.4500 79833.87 43912.01 Banca Mondiala<br />
PROGRAM MSDN UNVRSL 7.0 WIN32 314639 1.0000 2901.23 0.00 Banca Mondiala<br />
PROGRAM AE VJ++PRO 6.0 WIN32 314640 1.0000 301.52 0.00 Banca Mondiala<br />
PROGRAM VSTUDIO ENT EDNT 6.0 314641 1.0000 1018.56 0.00 Banca Mondiala<br />
PROGRAM FRONT PAGE2002 WIN32 314642 1.0000 261.07 0.00 Banca Mondiala<br />
CALCULATOR ACER VENTON 314667 1.0000 5863.37 0.00 Banca Mondiala<br />
CALCULATOR ACER VENTON 314668 1.0000 5863.37 0.00 Banca Mondiala<br />
CALCULATOR PIIICOPPERMINE,CPU 314702 1.0000 2896.20 0.00 Banca Mondiala<br />
30
CALCULATOR PIIICOPPERMINE,CPU 314703 1.0000 2896.20 0.00 Banca Mondiala<br />
CALCULATOR PIIICOPPERMINE,CPU 314704 1.0000 2896.20 0.00 Banca Mondiala<br />
CALCULATOR PIIICOPPERMINE,CPU 314705 1.0000 2896.20 0.00 Banca Mondiala<br />
CALCULATOR PIIICOPPERMINE,CPU 314706 1.0000 2896.20 0.00 Banca Mondiala<br />
CALCULATOR PIIICOPPERMINE,CPU 314707 1.0000 2896.20 0.00 Banca Mondiala<br />
CALCULATOR PIV ,1,5GHZ,COOLER,MB 314708 1.0000 3489.44 0.00 Banca Mondiala<br />
CALCULATOR PIV ,1,5GHZ,COOLER,MB 314709 1.0000 3489.44 0.00 Banca Mondiala<br />
3 COM DUAL SPEED SWITCH 16 PLUS 314737 1.0000 1250.00 0.00 Banca Mondiala<br />
SOFT WIN CON 3.2 FOR WINDOWS98 314739 1.0000 2168.86 0.00 Banca Mondiala<br />
EXPERMENT LABORATOR,COMPUS DIN 314740 0.8169 10010.10 1833.20 Banca Mondiala<br />
SISTEM EDUCATIONAL PT.STUDIUL 314742 0.8003 9287.04 1854.82 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200 315054 1.0000 1569.64 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200,14PPM,1200 315055 1.0000 1569.64 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 1200 315056 1.0000 1569.64 0.00 Banca Mondiala<br />
IMPRIMANTA HP LJ 315057 1.0000 1569.64 0.00 Banca Mondiala<br />
CALCULATOR PORTABIL DE TIP 315058 1.0000 8261.25 0.00 Banca Mondiala<br />
CALCULATOR PORTABIL DE TIP 315059 1.0000 8261.25 0.00 Banca Mondiala<br />
CALCULATOR PORTABIL DE TIP 315060 1.0000 8261.25 0.00 Banca Mondiala<br />
CAMERA FOTO DIGITALA 619531 1.0000 2534.63 0.00 Banca Mondiala<br />
SISTEM DE INREGISTRARE REDARE 619826 0.8321 1770.65 297.29 Banca Mondiala<br />
SISTEM DE INREGISTRARE REDARE 619827 0.8321 1770.65 297.29 Banca Mondiala<br />
VIDEOPROIECTOR ASK C 20,SVGA 1000 619973 0.7503 8261.25 2062.56 Banca Mondiala<br />
CALCULATOR COMRACE MAGNUM P4 314511 1.0000 4435.10 0.00 Banca Mondiala<br />
CALCULATOR COMRACE MAGNUM P4 314512 1.0000 4075.10 0.00 Banca Mondiala<br />
CALCULATOR COMRACE MAGNUM P4 314513 1.0000 3832.96 0.00 Banca Mondiala<br />
CALCURATOR COMRACE ELITE PIII 314514 1.0000 3425.89 0.00 Banca Mondiala<br />
CALCURATOR COMRACE ELITE PIII 314515 1.0000 3425.89 0.00 Banca Mondiala<br />
CALCURATOR COMRACE ELITE PIII 314516 1.0000 3425.89 0.00 Banca Mondiala<br />
CALCURATOR COMRACE ELITE PIII 314517 1.0000 3425.89 0.00 Banca Mondiala<br />
CALCULATOR COMRACE ELITE PIII 800 314518 1.0000 3086.10 0.00 Banca Mondiala<br />
CALCULATOR COMRACE ELITE PIII 800 314519 1.0000 3086.10 0.00 Banca Mondiala<br />
TOTAL BANCA MONDIALA 553554.13 98660.49<br />
PERIPHERALS ULTRA 5 SERVER 313497 1.0000 1064.15 0.00 Programe externe<br />
FLASH 4.0 EDUCATIONAL SOFT 313688 1.0000 215.36 0.00 Programe externe<br />
COMPUTER DTK PENTIUM - P III 500 313755 1.0000 5213.36 0.00 Programe externe<br />
DOCU PRINT C20 IMPRIMANTA 313756 1.0000 1881.68 0.00 Programe externe<br />
SERVER ALPIS INTEL PIII/1000 314402 1.0000 5601.40 0.00 Programe externe<br />
3 COM OFFICE CONNECT DUAL SPEE 314403 1.0000 1052.24 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII, 314404 1.0000 7211.46 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314405 1.0000 3553.65 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314406 1.0000 3553.65 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314407 1.0000 3553.65 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314408 1.0000 3553.65 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314409 1.0000 3553.65 0.00 Programe externe<br />
CALCULATOR ALPIS INTEL PIII 314410 1.0000 3553.65 0.00 Programe externe<br />
RETROPROIECTOR GEHA 2600 OVERH 619367 1.0000 980.86 0.00 Programe externe<br />
VIDEOPROIECTOR PHILIPS LCD 619368 1.0000 6095.76 0.00 Programe externe<br />
COPIATOR SHARP DIGITAL 619369 1.0000 5642.48 0.00 Programe externe<br />
TOTAL PROGRAME EXTERNE 56280.65 0.00<br />
TOTAL 1931141.09 626384.70<br />
31
ANEXA B 2007<br />
Nr.<br />
Crt.<br />
1<br />
Denumire echipament<br />
Numar<br />
inventar<br />
Gr.uzura<br />
Valoare<br />
de intrare<br />
Amortizar<br />
e<br />
totala<br />
Valoare<br />
ramasa<br />
IMPRIMANTA HP LJ 5550 HDN,<br />
SERIE:JPSMDXGOB, CU CABLU<br />
USB 2.0A-B 1.8M 217024 0.02777188 20,056.26 557.00 19,499.26<br />
Sursa de<br />
finantare<br />
Venituri<br />
proprii<br />
Venituri<br />
proprii<br />
2 SOFT AVID LIQUID 217034 0 1,587.46 0.00 1,587.46<br />
TOTAL VENITURI PROPRII 21,643.72 557.00 21,086.72<br />
AUTOMAT PROGRAMABIL<br />
3 MITSUMI 215342 0.03297245 4,973.85 164.00 4,809.85 Donatii<br />
TOTAL DONATII 4,973.85 164.00 4,809.85<br />
4 NOTEBOOK HP NX 9420 215225 0.10391747 5,446.63 566.00 4,880.63 Cercetare<br />
5<br />
SIMULATOR ELECTRO-<br />
PNEUMATIC 215230 0.08301443 6,083.28 505.00 5,578.28 Cercetare<br />
6 NOTEBOOK HP NW8240 215235 0.10408535 6,533.10 680.00 5,853.10 Cercetare<br />
7 NOTEBOOK HP NW8240 215236 0.10408535 6,533.10 680.00 5,853.10 Cercetare<br />
8<br />
IMPRIMANTA HP LASER COLOR<br />
3600 215278 0.13923095 1,616.02 225.00 1,391.02 Cercetare<br />
9<br />
IMPRIMANTA HP LASER COLOR<br />
3600 215279 0.13923095 1,616.02 225.00 1,391.02 Cercetare<br />
10 SOFTWARE WINCON 5.0 215286 0.10388561 3,417.22 355.00 3,062.22 Cercetare<br />
11 MODUL ELECTRONIC DE PUTERE 215287 0.10461677 4,253.62 445.00 3,808.62 Cercetare<br />
12<br />
MODUL MECANIC DE TIP BILA PE<br />
BARA 215288 0.10433419 7,523.90 785.00 6,738.90 Cercetare<br />
13<br />
MODUL CU BRAT ROBOTIC<br />
FLEXIBIL 215289 0.10402292 6,152.49 640.00 5,512.49 Cercetare<br />
14<br />
MODUL ELECTRONIC DE<br />
ACTIONARE CU SERVOMOTOR 215290 0.10427002 10,885.20 1,135.00 9,750.20 Cercetare<br />
15<br />
PC SYPERLINE,PL.DE BAZA GIGA-<br />
BYTE 865GV,SOUND<br />
LAN,DDRAM,MATX,CPU INTEL P4<br />
524,3066MHZ,1MB,CACHE,HDD<br />
120 GB,7200RPM,8MB<br />
CACHE,DDRAM 1 GB,PL.VIDEO ATI<br />
RADEON 9250,128 MB,64<br />
BIT,COMBO<br />
52X/32X/16X/52X,MIDITOWER<br />
CASE 400W,SERIE:05112188 215303 0.10310873 1,939.70 200.00 1,739.70 Cercetare<br />
16<br />
PC SYPERLINE,PL.DE BAZA GIGA-<br />
BYTE 865GV,SOUND<br />
LAN,DDRAM,MATX,CPU INTEL P4<br />
524,3066MHZ,1MB,CACHE,HDD<br />
120 GB,7200RPM,8MB<br />
CACHE,DDRAM 1 GB,PL.VIDEO ATI<br />
RADEON 9250,128 MB,64<br />
BIT,COMBO<br />
52X/32X/16X/52X,MIDITOWER<br />
CASE 400W,SERIE:05112132 215304 0.10310873 1,939.70 200.00 1,739.70 Cercetare<br />
17<br />
PC SYPERLINE,PL.DE BAZA GIGA-<br />
BYTE 865GV,SOUND<br />
LAN,DDRAM,MATX,CPU INTEL P4<br />
524,3066MHZ,1MB,CACHE,HDD<br />
120 GB,7200RPM,8MB<br />
CACHE,DDRAM 1 GB,PL.VIDEO ATI<br />
RADEON 9250,128 MB,64<br />
BIT,COMBO<br />
52X/32X/16X/52X,MIDITOWER<br />
CASE 400W,SERIE:05112050 215305 0.10310873 1,939.70 200.00 1,739.70 Cercetare<br />
18<br />
LICENTE SOFTWARE SIMULARE<br />
SCHEME HIDRAULICE SI<br />
ELECTRO-HIDRAULICE (FLUID<br />
SIM-H 3.6) 215309 0.08393789 833.95 70.00 763.95 Cercetare<br />
19<br />
LICENTE SOFTWARE SIMULARE<br />
SCHEME HIDRAULICE SI<br />
ELECTRO-HIDRAULICE (FLUID<br />
SIM-H 3.6) 215310 0.08393789 833.95 70.00 763.95 Cercetare<br />
32
20<br />
21<br />
NOTEBOOK M1450G CU LICENTA<br />
WINDOWS XP HOME TV TUNER<br />
LEATEK 216762 0.04179846 3,205.86 134.00 3,071.86 Cercetare<br />
APARAT MULTIPARAMETRU DE<br />
LABORATOR C863 216295 0.01658786 11,092.45 184.00 10,908.45 Cercetare<br />
22 LAPTOP HP NW 8430 216847 0.041631 5,572.77 232.00 5,340.77 Cercetare<br />
23<br />
POMPA VID CU MANOMETRU DE<br />
CONTROL SI REGLARE 217015 0.0084272 2,135.94 18.00 2,117.94 Cercetare<br />
24<br />
SPECTOFOTOMETRU UV-VIS<br />
VARIAN CARY 50 217016 0.00832733 29,661.37 247.00 29,414.37 Cercetare<br />
25 OMOGENIZATOR DE LABORATOR 217017 0.00830483 5,298.12 44.00 5,254.12 Cercetare<br />
26<br />
PH-METRU / CONDUCTOMETRU<br />
HANNA 217022 0.00684873 3,504.30 24.00 3,480.30 Cercetare<br />
27<br />
CROMATOGRAF DE LICHID DE<br />
INALTA PERFORMANTA 217026 0 149,992.36 0.00 149,992.36 Cercetare<br />
28 BALANTA ANALITICA PW 217027 0 3,643.21 0.00 3,643.21 Cercetare<br />
29 ETUVA CU VID CU POMPA VID 217028 0 32,047.64 0.00 32,047.64 Cercetare<br />
30<br />
APARAT PENTRU PRODUCEREA<br />
APEI PURE 217031 0 14,246.64 0.00 14,246.64 Cercetare<br />
31 CENTRIFUGA DE LABORATOR 217032 0 12,135.74 0.00 12,135.74 Cercetare<br />
32 NISA CU EXHAUSTARE 217033 0 16,695.45 0.00 16,695.45 Cercetare<br />
33<br />
COMBINA FRIGORIFICA<br />
ELECTROLUX 320285 0.04944085 1,699.00 84.00 1,615.00 Cercetare<br />
34 VIDEOPROIECTOR BENQ CP 120 320337 0.0333745 5,093.71 170.00 4,923.71 Cercetare<br />
35<br />
NOTEBOOK FUJITSU-SIEMENS<br />
LIFEBOOK E8110 215319 0.10392966 5,542.21 576.00 4,966.21 Cercetare<br />
36<br />
REMORCA (TRACTATA) TRACTOR<br />
ETM 400 216480 0.02083134 2,400.23 50.00 2,350.23 Cercetare<br />
37<br />
ANALIZOR PORTABIL<br />
REFLECTOQUANT RQ FLEX 10<br />
PLUS 216984 0.0170272 2,584.10 44.00 2,540.10 Cercetare<br />
38<br />
BALANTA PGW 153I CALIB<br />
INTERNA150G/0,001 MG 216979 0.03366795 2,910.78 98.00 2,812.78 Cercetare<br />
39 BALANTA PW 124 120G/0,1 MG 216980 0.03348695 3,643.21 122.00 3,521.21 Cercetare<br />
40 MICROSCOP OPTIC TRINOCULAR 216981 0.01655013 4,592.11 76.00 4,516.11 Cercetare<br />
HOTA CU FLUX LAMINAR<br />
41 VERTICAL TIP LAMINAIR 2 216985 0.01680672 4,998.00 84.00 4,914.00 Cercetare<br />
42 IMAGE PRO EXPRESS 216986 0.04159931 7,596.28 316.00 7,280.28 Cercetare<br />
43<br />
NOTEBOOK DELL INSPIRATION<br />
1300 215223 0.10454632 2,773.89 290.00 2,483.89 Cercetare<br />
44<br />
IMPRIMANTA XEROX PHASER<br />
6120N 216222 0.08318407 2,825.06 235.00 2,590.06 Cercetare<br />
45 LUXMETRU DIGITAL 1-400 000 216337 0.04167769 1,511.60 63.00 1,448.60 Cercetare<br />
46<br />
SOFT CONDUCERE (SIMULARE)<br />
PENTRU VITA DE VIE 216338 0.06274883 1,848.64 116.00 1,732.64 Cercetare<br />
47 MICROSCOP PORTABIL PE USB 216339 0.02066077 3,194.46 66.00 3,128.46 Cercetare<br />
48<br />
NOTEBOOK DELL INSPIRATION<br />
1300 215224 0.10454632 2,773.89 290.00 2,483.89 Cercetare<br />
49 NOTEBOOK HP NX 9420 215396 0.08337824 5,289.15 441.00 4,848.15 Cercetare<br />
50 BALANTA PENTRU UMIDITATE 216340 0.04151494 5,058.42 210.00 4,848.42 Cercetare<br />
51 TERMOMETRU FLUKE 65 IR 216341 0.0407274 1,546.87 63.00 1,483.87 Cercetare<br />
PH-METRU/CONDUCTOMETRU<br />
52 HANNA 217020 0.00684873 3,504.30 24.00 3,480.30 Cercetare<br />
53 VIDEOPROIECTOR 320249 0.08372914 3,941.28 330.00 3,611.28 Cercetare<br />
54 NOTEBOOK HP NX 9420 215395 0.08337824 5,289.15 441.00 4,848.15 Cercetare<br />
55<br />
NOTEBOOK FUJITSU SIEMENS<br />
AMILO 215402 0.0829637 2,748.19 228.00 2,520.19 Cercetare<br />
56<br />
ECHIPAMENT EDUCATIONAL<br />
PASCO HALLIDAY<br />
RESNIK&WALKER BASE BUNDLE 215343 0.05559532 20,145.58 1,120.00 19,025.58 Cercetare<br />
57<br />
ECHIPAMENT EDUCATIONAL<br />
PASCO HALLIDAY<br />
RESNIK&WALKER BASE BUNDLE 215344 0.05559532 20,145.58 1,120.00 19,025.58 Cercetare<br />
58<br />
ECHIPAMENT EDUCATIONAL<br />
PASCO HALLIDAY<br />
RESNIK&WALKER BASE BUNDLE 215345 0.05559532 20,145.58 1,120.00 19,025.58 Cercetare<br />
33
59<br />
ECHIPAMENT EDUCATIONAL<br />
PASCO HALLIDAY<br />
RESNIK&WALKER BASE BUNDLE 215346 0.05564736 20,126.74 1,120.00 19,006.74 Cercetare<br />
60 LAPTOP HP NW 8430 216849 0.08344145 5,572.77 465.00 5,107.77 Cercetare<br />
61<br />
SCIENTIFIC WORKPLBCE 5.5<br />
ACADEMIC LICENCE 215340 0.08360705 2,344.30 196.00 2,148.30 Cercetare<br />
62<br />
WINDOWS XP PRO SP213 ENG.<br />
IPK OEI 215204 0.10556987 473.62 50.00 423.62 Cercetare<br />
63<br />
ADOBE ACROBAT 7.0 STANDARD<br />
WIN AOO ACADEMIC 3 USE<br />
LICENSE IE 215292 0.08477737 1,179.56 100.00 1,079.56 Cercetare<br />
64 PC SYPERLINE 215307 0.10442496 2,633.47 275.00 2,358.47 Cercetare<br />
65<br />
INSTALATIE FRIG CU AGREGAT SI<br />
TURBOSUFLANTA 30<br />
M.C,TERMOSTATAT PRODIGI,<br />
CEAS DEZGHETARE 215200 0.07 2,500.00 175.00 2,325.00 Cercetare<br />
66<br />
AUTOCLAV ( STERILIZATOR CU<br />
ABUR) TIP A 22 (S.A.M-RO),SERIE:<br />
235/<strong>2006</strong> 215284 0.08355273 8,318.10 695.00 7,623.10 Cercetare<br />
67<br />
CENTRALA WIESSMANN<br />
VITOPEND 100,<br />
30KW,SERIE:7277951 215285 0.05166667 3,000.00 155.00 2,845.00 Cercetare<br />
68 PC SYPERLINE 3000 215302 0.10442496 2,633.47 275.00 2,358.47 Cercetare<br />
69<br />
COPIATOR CANON IR1510,<br />
SERIE:JQG25340 320245 0.1041739 2,015.86 210.00 1,805.86 Cercetare<br />
70<br />
NOTEBOOK FUJITSU SIEMENS<br />
2085 215221 0.1037235 2,844.10 295.00 2,549.10 Cercetare<br />
71<br />
PANOU SOLAR USP 150 W/24V<br />
LPS00253 215201 0.08317962 3,149.81 262.00 2,887.81 Cercetare<br />
72<br />
PANOU SOLAR USP 150 W/24V<br />
LPS00253 215202 0.08317962 3,149.81 262.00 2,887.81 Cercetare<br />
73<br />
INVERTOR FRARON 1200 PS/12 V<br />
LPI 00158 215203 0.06924403 2,238.46 155.00 2,083.46 Cercetare<br />
SISTEM DE ACTIONARE CU<br />
MOTOR ASINCRON SI<br />
74 CONVERTOR STATIC 215217 0.10425592 3,069.37 320.00 2,749.37 Cercetare<br />
75<br />
PROGRAMATOR MEMORII,INTERF<br />
USB/LPT BEEPROG 215218 0.08382318 2,851.24 239.00 2,612.24 Cercetare<br />
76<br />
NOTEBOOK FUJITSU SIEMENS<br />
2085 215219 0.10376937 2,553.74 265.00 2,288.74 Cercetare<br />
77 NOTEBOOK LENOVO 3000 215233 0.10439494 5,795.30 605.00 5,190.30 Cercetare<br />
78 SIMBIOLOGY TOOLBOX 216854 0.04271861 234.09 10.00 224.09 Cercetare<br />
79 SIMBIOLOGY TOOLBOX 216855 0.04271861 234.09 10.00 224.09 Cercetare<br />
80 SIMBIOLOGY TOOLBOX 216856 0.04271861 234.09 10.00 224.09 Cercetare<br />
81 SIMBIOLOGY TOOLBOX 216857 0.04271861 234.09 10.00 224.09 Cercetare<br />
82 SIMBIOLOGY TOOLBOX 216866 0.04271861 234.09 10.00 224.09 Cercetare<br />
83 SIMBIOLOGY TOOLBOX 216867 0.04272044 234.08 10.00 224.08 Cercetare<br />
84 SIMBIOLOGY TOOLBOX 216868 0.04272044 234.08 10.00 224.08 Cercetare<br />
85 SIMBIOLOGY TOOLBOX 216869 0.04272044 234.08 10.00 224.08 Cercetare<br />
86 SIMBIOLOGY TOOLBOX 216871 0.04272044 234.08 10.00 224.08 Cercetare<br />
87 SIMBIOLOGY TOOLBOX 216872 0.04272044 234.08 10.00 224.08 Cercetare<br />
88 VIDEOPROIECTOR BENQ PB8253 320251 0.1038547 6,788.33 705.00 6,083.33 Cercetare<br />
89 PC SYPERLINE 215308 0.10442496 2,633.47 275.00 2,358.47 Cercetare<br />
90<br />
IMPRIMANTA HP LASER COLOR<br />
3600 215277 0.13923095 1,616.02 225.00 1,391.02 Cercetare<br />
91 CALCULATOR SYPERLINE 215337 0.08339716 4,556.51 380.00 4,176.51 Cercetare<br />
92 SISTEM PORTABIL DE TIP PDA 215339 0.08353688 2,202.62 184.00 2,018.62 Cercetare<br />
93<br />
STRUNG ASIST PENTRU METAL<br />
370W,SERIE:GR750601-42655 216084 0.0252241 2,140.81 54.00 2,086.81 Cercetare<br />
94 CALCULATOR SYPERLINE 216346 0.06225371 4,963.56 309.00 4,654.56 Cercetare<br />
95 CALCULATOR COMRACE 216447 0.06228055 3,323.67 207.00 3,116.67 Cercetare<br />
96<br />
TOTAL CERCETARE 607,596.26 24,199.00 583,397.26<br />
SERVOMOTOR ROTATIV CU<br />
POTENTIOMETRU 215353 0.04996027 9,827.81 491.00 9,336.81<br />
Finantare<br />
compleme<br />
34
97<br />
98<br />
SERVOMOTOR ROTATIV CU<br />
POTENTIOMETRU 215354 0.04996027 9,827.81 491.00 9,336.81<br />
SERVOMOTOR ROTATIV CU<br />
POTENTIOMETRU 215355 0.04996021 9,827.82 491.00 9,336.82<br />
99 MODUL DE PUTERE,SERIE:07115 215356 0.04970243 3,862.99 192.00 3,670.99<br />
100 MODUL DE PUTERE,SERIE:06996 215357 0.04970243 3,862.99 192.00 3,670.99<br />
101 MODUL DE PUTERE,SERIE:06973 215358 0.04970243 3,862.99 192.00 3,670.99<br />
102 Q4 PLACA DE ACHIZITII 215359 0.04990628 9,197.24 459.00 8,738.24<br />
103 Q4 PLACA DE ACHIZITII 215360 0.04990628 9,197.24 459.00 8,738.24<br />
104 Q4 PLACA DE ACHIZITII 215361 0.04990628 9,197.24 459.00 8,738.24<br />
105<br />
106<br />
MODUL ROBOT 2 GRADE<br />
LIBERTATE 215362 0.05010208 4,790.22 240.00 4,550.22<br />
PENDUL INVERS CU AUTO -<br />
RIDICARE 215363 0.04988006 3,989.57 199.00 3,790.57<br />
107 MODUL BILA PE BARA 215364 0.05005181 6,832.92 342.00 6,490.92<br />
108 MODUL ARTICULATIE FLEXBILIA 215365 0.04993306 5,587.48 279.00 5,308.48<br />
109<br />
110<br />
111<br />
OSCILOSCOP TEHTRONIC TDS<br />
3054B 216246 0.02082543 30,539.58 636.00 29,903.58<br />
SCANNER 3 D ROLAND LPX-<br />
600,DIMENSIUNI SCANARE<br />
254X406,4MM,PRECIZIE<br />
0,2MM,REPETABILITATE +/-0,05<br />
MM,GREUTATE MAX.5KG,SENSOR<br />
LASER FARA CONTACT,VITEZA DE<br />
ROTIRE A MESEI 9<br />
RPM,USB,SERIE:ZU70231 215327 0.0333336 47,099.62 1,570.00 45,529.62<br />
FREZA CU SCANNER PIEZZO 3D<br />
ROLAND MDX-40,DIMENSIUNEA<br />
MESEI 305*305 105 MM,<br />
GREUTATE MAX.4KG, MOTOR PAS<br />
CU PAS, REZOLUTIE MECANICA<br />
0,002 MM, 4500-15000<br />
RPM,USB,SERIE:NDX40ZT10248 215328 0.02557622 30,184.29 772.00 29,412.29<br />
112 PINACLE STD 10 MEDIASUITE 216804 0.05335468 299.88 16.00 283.88<br />
113 PINACLE STD 10 MEDIASUITE 216805 0.05335468 299.88 16.00 283.88<br />
114<br />
CAMERA VIDEO SONY DCR-VX<br />
2100E, SERIE:1024511 320310 0.0499149 12,020.46 600.00 11,420.46<br />
115 NOTEBOOK HP NX 9420 215399 0.08337824 5,289.15 441.00 4,848.15<br />
116<br />
117<br />
VIDEORECORDER DIGITAL JVC<br />
BR-DV 3000 E,SERIE:1146527 216196 0.04176951 11,347.99 474.00 10,873.99<br />
VIDEORECORDER DIGITAL JVC<br />
BR-DV 3000 E,SERIE:1146524 216197 0.04176951 11,347.99 474.00 10,873.99<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
35
118<br />
119<br />
VIDEORECORDER DIGITAL JVC<br />
BR-DV 3000 E,SERIE:1146622 216198 0.04176951 11,347.99 474.00 10,873.99<br />
VIDEORECORDER DIGITAL JVC<br />
BR-DV 3000 E,SERIE:1146588 216199 0.04176951 11,347.99 474.00 10,873.99<br />
120 CALCULATPR COMRACE ELITE 215366 0.06237744 3,126.13 195.00 2,931.13<br />
121 CALCULATPR COMRACE ELITE 215367 0.06237744 3,126.13 195.00 2,931.13<br />
122 CALCULATPR COMRACE ELITE 215368 0.06237744 3,126.13 195.00 2,931.13<br />
123 CALCULATPR COMRACE ELITE 215369 0.06237744 3,126.13 195.00 2,931.13<br />
124 CALCULATPR COMRACE ELITE 215370 0.06237744 3,126.13 195.00 2,931.13<br />
125 CALCULATPR COMRACE ELITE 215371 0.06237744 3,126.13 195.00 2,931.13<br />
126 CALCULATPR COMRACE ELITE 215372 0.06237744 3,126.13 195.00 2,931.13<br />
127<br />
128<br />
129<br />
SPECTROFOTOMETRU CECIL<br />
1021 216343 0.01661628 15,526.94 258.00 15,268.94<br />
SOFT RAMAS RED LIST<br />
ACADEMIC 216518 0.04166529 48,337.60 2,014.00 46,323.60<br />
CENTRIFUGA DE LABORATOR<br />
EBA 216778 0.01675785 2,864.33 48.00 2,816.33<br />
130 NOTEBOOK HP8430 216783 0.041631 5,572.77 232.00 5,340.77<br />
131<br />
132<br />
133<br />
STEREOMOCROSCOP<br />
TRINOCULAR 216982 0.01677219 6,439.23 108.00 6,331.23<br />
MICROTOMAUTOMAT<br />
SLEE,MODEL CUT 6062 216330 0.01666705 39,599.09 660.00 38,939.09<br />
MICROTOMAUTOMAT<br />
SLEE,MODEL CUT 6062 216331 0.01666705 39,599.08 660.00 38,939.08<br />
134 CITITOR DE PLACI ELISA 216342 0.0166512 15,134.04 252.00 14,882.04<br />
135<br />
NCSS 2004 DE LUXE ,SIGMASTAT<br />
ACADEMIC 216351 0.06240595 6,585.91 411.00 6,174.91<br />
136 SIMULCEP 3D 216355 0.06363685 1,131.42 72.00 1,059.42<br />
SISTEM HPLC (CROMATOGRAF D<br />
LICHIDE DE INALTA<br />
137 PERFORMANTA 216754 0.01667021 63,346.53 1,056.00 62,290.53<br />
SISTEM PORTABIL INTELIGENT<br />
PENTRU MASURAREA<br />
138 FOTOSINTEZEI 216756 0.01666583 97,804.90 1,630.00 96,174.90<br />
139 SISTEM P.C.R 216983 0.01662187 19,372.07 322.00 19,050.07<br />
140<br />
141<br />
142<br />
QUICKFIELD 10 SEATS<br />
PERMANENT LICENSE 216354 0.06253422 36,651.93 2,292.00 34,359.93<br />
MATHCAD 13 SINGLE USER<br />
ACADEMIC NEW PROFESSOR 216356 0.06222349 1,751.75 109.00 1,642.75<br />
OHMETRU DIGITAL SEFRON MW<br />
9180,SERIE:9543471 216460 0.01655061 6,525.44 108.00 6,417.44<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
36
143<br />
144<br />
145<br />
146<br />
FRECVENTMETRU DIGITAL BK<br />
PRECISION BK1856D 216461 0.0169271 2,835.69 48.00 2,787.69<br />
FRECVENTMETRU DIGITAL BK<br />
PRECISION BK1856D 216462 0.01661236 1,565.10 26.00 1,539.10<br />
IMPRIMANTA MULTIFUNCTIONALA<br />
HP LJ 3055 216476 0.04223419 1,610.07 68.00 1,542.07<br />
FRIGIDER CU 2 USI INDESIT TAS<br />
FNF 320264 0.05032258 1,550.00 78.00 1,472.00<br />
147 VIDEOPROIECTOR BENQ CP220 320295 0.05021282 4,301.69 216.00 4,085.69<br />
148 VIDEOPROIECTOR BENQ CP220 320297 0.05021282 4,301.69 216.00 4,085.69<br />
149 COPIATOR CANON IR 2880I 320335 0.0278067 25,101.86 698.00 24,403.86<br />
150 CALCULATOR COMRACE ELITE 215383 0.06237744 3,126.13 195.00 2,931.13<br />
151 PC SYPERLINE P600X 216136 0.06201877 2,757.23 171.00 2,586.23<br />
152 PC SYPERLINE P600X 216137 0.06201877 2,757.23 171.00 2,586.23<br />
153 PC SYPERLINE P600X 216138 0.06201877 2,757.23 171.00 2,586.23<br />
154 PC SYPERLINE P600X 216139 0.06201877 2,757.23 171.00 2,586.23<br />
155 PC SYPERLINE P600X 216140 0.06201877 2,757.23 171.00 2,586.23<br />
156 PC SYPERLINE P600X 216141 0.06201877 2,757.23 171.00 2,586.23<br />
157 CALCULATOR ELSACO 216169 0.04172331 4,457.94 186.00 4,271.94<br />
158 CALCULATOR ELSACO 216170 0.04172331 4,457.94 186.00 4,271.94<br />
159 CALCULATOR ELSACO 216171 0.04172331 4,457.94 186.00 4,271.94<br />
160 CALCULATOR ELSACO 216172 0.04172331 4,457.94 186.00 4,271.94<br />
161 CALCULATOR ELSACO 216173 0.04172331 4,457.94 186.00 4,271.94<br />
162 CALCULATOR ELSACO 216174 0.04172331 4,457.94 186.00 4,271.94<br />
163 CALCULATOR ELSACO 3400 216286 0.04150247 4,963.56 206.00 4,757.56<br />
164<br />
165<br />
166<br />
CAMERA TERMICA IN INFRAROSU<br />
THERMACAM E45 216309 0.02079182 28,857.50 600.00 28,257.50<br />
IMPRIMANTA MULTIFUNCTIONALA<br />
HP LJ 3055 216477 0.04223419 1,610.07 68.00 1,542.07<br />
VIDEOPROIECTOR BENQ<br />
CP220,SERIE 320299 0.05021271 4,301.70 216.00 4,085.70<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
37
167<br />
168<br />
169<br />
ANSAMBLU DE ECHIPAMENTE<br />
PENTRU LINII DE FABRICATIE SI<br />
CONDUCEREA PROCESELOR 216757 0.01665822 107,334.42 1,788.00 105,546.42<br />
SISTEM PENTRU DETERMINAREA<br />
VALORII PARAMETRILOR CIRCUIT 216303 0.01672437 15,785.35 264.00 15,521.35<br />
SET DE ECHIP.PT DET.CALITATII<br />
PRECIPITATIILOR 216759 0.01670137 26,464.89 442.00 26,022.89<br />
170 ANSAMBLU CONVERSIE SOLARA 216160 0.01661398 8,847.97 147.00 8,700.97<br />
171 TURBINA EOLIANA 3,2KW 216161 0.0124762 39,194.63 489.00 38,705.63<br />
172 IMPRIMANTA HP 3600 216317 0.08373667 1,683.85 141.00 1,542.85<br />
173<br />
174<br />
175<br />
176<br />
177<br />
178<br />
179<br />
BANC DIDACTIC SERVO DRIVES<br />
LD DIDACTIC T.12.5.1 216334 0.0277894 68,803.22 1,912.00 66,891.22<br />
MIXER AUDIO MACKIE ONYX<br />
1640,SERIE:JS20189 216200 0.04144537 6,514.60 270.00 6,244.60<br />
MIXER AUDIO MACKIE ONYX<br />
1640,SERIE:JS20160 216201 0.04144537 6,514.60 270.00 6,244.60<br />
CAMERA VIDEO DE TEREN SONY<br />
HDR-FX1,SERIE:10229992 216202 0.04163731 14,121.95 588.00 13,533.95<br />
CAMERA VIDEO DE TEREN SONY<br />
HDR-FX1,SERIE:10229993 216203 0.04163731 14,121.95 588.00 13,533.95<br />
CAMERA VIDEO DE TEREN SONY<br />
HDR-FX1,SERIE:10229998 216204 0.04163731 14,121.95 588.00 13,533.95<br />
CAMERA VIDEO DE TEREN SONY<br />
HDR-FX1,SERIE:10229968 216205 0.04163731 14,121.95 588.00 13,533.95<br />
180 CALCULATOR ELSACO 216213 0.02624776 8,076.88 212.00 7,864.88<br />
181 CALCULATOR ELSACO 216214 0.02624776 8,076.88 212.00 7,864.88<br />
182 CALCULATOR ELSACO 216215 0.02624776 8,076.88 212.00 7,864.88<br />
183 CALCULATOR ELSACO 216216 0.02624776 8,076.88 212.00 7,864.88<br />
184 CALCULATOR ELSACO 216217 0.04165054 5,089.97 212.00 4,877.97<br />
185 CALCULATOR ELSACO 216218 0.04165054 5,089.97 212.00 4,877.97<br />
186 CALCULATOR ELSACO 216219 0.04165054 5,089.97 212.00 4,877.97<br />
187 CALCULATOR ELSACO 216220 0.04165054 5,089.97 212.00 4,877.97<br />
188<br />
189<br />
190<br />
CAMERA VIDEO DE STUDIO JVC<br />
KY-F560 SERIE:121GO596 216300 0.02467993 57,860.77 1,428.00 56,432.77<br />
CAMERA VIDEO DE STUDIO JVC<br />
KY-F560 SERIE:121GO581 216301 0.02467993 57,860.77 1,428.00 56,432.77<br />
CAMERA VIDEO DE STUDIO JVC<br />
KY-F560 SERIE:121GO589 216302 0.04168839 34,254.14 1,428.00 32,826.14<br />
191 EMITATOR TV DBT 216305 0.02383056 135,834.01 3,237.00 132,597.01<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
38
192<br />
193<br />
194<br />
195<br />
196<br />
197<br />
198<br />
199<br />
200<br />
201<br />
202<br />
203<br />
CREATIVE SUITES PREM 2.3 WIN<br />
EDU LICENSE 4 USER (1<br />
BUC),CREATIVE SUITES PREM<br />
ALL MAINT 2 YEARS 4 USERS (1<br />
BUC)CREATIVE SUITES PREM 2.3<br />
IE WIN CD SET (1 BUC) 216350 0.06225446 5,638.15 351.00 5,287.15<br />
ADOBE PREMIERE PRO 2.0 WIN<br />
EDU LICENSE 4 USERS, ADOBE<br />
PREMIERE PRO ALL MAINT 2<br />
YEARS 4 USERS ( 1 BUC ), ADOBE<br />
PREMIERE PRO 2.0 IE WIN CD SET<br />
(1 BUC ) 216352 0.0623332 4,957.23 309.00 4,648.23<br />
APARAT CLIMATIZARE WHITE<br />
WESTINGHOUSE 24000<br />
BTU,SERIE:<br />
U.I:018470387040500014,U.E01847<br />
0253040900017 216469 0.02782913 3,521.49 98.00 3,423.49<br />
APARAT CLIMATIZARE WHITE<br />
WESTINGHOUSE 24000<br />
BTU,SERIE:<br />
U.I:018470387040500024,U.E01847<br />
0253040900023 216470 0.02782921 3,521.48 98.00 3,423.48<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216785 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216786 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216787 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216788 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216789 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216790 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216791 0.0417789 909.55 38.00 871.55<br />
WINDOWS XP PROFESSIONAL<br />
ENGLISH INTL NON-EU/EFTA CD<br />
W/SP2 FOR NON-EU/EFTA 216792 0.0417789 909.55 38.00 871.55<br />
204 CAR DE TELEVIZIUNE 217008 0.0208352 494,643.73 10,306.00 484,337.73<br />
VIDEOPROIECTOR BENQ MP 720P<br />
SI ECRAN PROIECTIE 1,8X1,8 CU<br />
205 TREPIED, SERIE:PD47601969SUO 320257 0.06676158 3,954.37 264.00 3,690.37<br />
MONITOR COLOR CU PLASMA LG<br />
42 PC1R HDR 41L003,<br />
206 SERIE:610MAGP8S375 320290 0.04987212 5,474.00 273.00 5,201.00<br />
MONITOR COLOR CU PLASMA LG<br />
42 PC1R HDR 41L003,<br />
207 SERIE:610MAAK8T280 320291 0.04987212 5,474.00 273.00 5,201.00<br />
MONITOR COLOR CU PLASMA LG<br />
42 PC1R HDR 41L003,<br />
208 SERIE:608MAMB65371 320292 0.04987212 5,474.00 273.00 5,201.00<br />
MONITOR COLOR CU PLASMA LG<br />
42 PC1R HDR 41L003,<br />
209 SERIE:610MALF8S376 320293 0.04987212 5,474.00 273.00 5,201.00<br />
MONITOR COLOR CU PLASMA LG<br />
42 PC1R HDR 41L003,<br />
210 SERIE:610MADH99946 320294 0.04987212 5,474.00 273.00 5,201.00<br />
211<br />
212<br />
MONITOR ALB NEGRU SONY<br />
PVM-96,SERIE:1010650 320328 0.04996479 2,101.48 105.00 1,996.48<br />
MONITOR ALB NEGRU SONY<br />
PVM-96,SERIE:1010655 320329 0.04996479 2,101.48 105.00 1,996.48<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
39
213<br />
214<br />
215<br />
MONITOR ALB NEGRU SONY<br />
PVM-96,SERIE:1010638 320330 0.04996479 2,101.48 105.00 1,996.48<br />
MONITOR ALB NEGRU SONY<br />
PVM-96,SERIE:1010665 320331 0.04996479 2,101.48 105.00 1,996.48<br />
MONITOR ALB NEGRU SONY<br />
PVM-96,SERIE:1010641 320332 0.04996479 2,101.48 105.00 1,996.48<br />
TOTAL FINANTARE<br />
COMPLEMENTARA 2,054,029.8 57,719.00 1,996,310.8<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
Finantare<br />
compleme<br />
ntara<br />
TOTAL 2,688,243.6 82,639.00 2,605,604.6<br />
40
ANEXA Ba <strong>2008</strong><br />
DENUMIRE IMOBILIZARE NR.INV. GR.UZURA<br />
VAL.<br />
DE<br />
INTRARE<br />
VAL.<br />
AMORTI<br />
ZARE<br />
VAL.<br />
RAMASA<br />
SURSA DE<br />
FINANTARE<br />
0 2 3 4 5 6 7<br />
SOFTWARE LIFE 217544 0.104116882 15943.62 1660.00 14283.62 CERCETARE<br />
NOTEBOOK SONY VAIO VGN-AR 217903 0.083207053 7259.00 604.00 6655.00 CERCETARE<br />
PROIECTOR LCD PANASONIC<br />
P1SDE CU 320504 0.033567832 2800.30 94.00 2706.30 CERCETARE<br />
SOFT- ACROBAT<br />
PROFESSIONAL 8.0 217396 0.165172973 653.86 108.00 545.86 CERCETARE<br />
SISTEM DE MASURARE A<br />
PARAMETRILOR 217561 0.041647304 6843.18 285.00 6558.18 CERCETARE<br />
NEUROSOLUTIONS FOR<br />
MATLAB SUITE 218053 0.083145331 9188.73 764.00 8424.73 CERCETARE<br />
CALCULATOR HUSK OFFICE<br />
TECH 218070 0.082823901 2028.40 168.00 1860.40 CERCETARE<br />
SISTEM DE MASURARE A<br />
PARAMETRILOR 218167 0.027863964 8756.83 244.00 8512.83 CERCETARE<br />
NOTEBOOK DELL LATITUDE<br />
D830 INTEL 218114 0.08310609 5390.70 448.00 4942.70 CERCETARE<br />
CALCULATOR SYPERLINE<br />
INTEL CORE 2 217184 0.136110782 7266.14 989.00 6277.14 CERCETARE<br />
CALCULATOR SYPERLINE<br />
INTEL CORE 2 217185 0.145572345 3414.11 497.00 2917.11 CERCETARE<br />
ECHIPAMENT PENTRU<br />
INREGISTRAREA ECG 217311 0.083134016 8805.06 732.00 8073.06 CERCETARE<br />
NOTEBOOK FUJITSU-SIEMENS<br />
ESPRIMO 217901 0.083149049 2261.00 188.00 2073.00 CERCETARE<br />
SISTEM DE PROCESARE DATE 217974 0.083393996 14341.56 1196.00 13145.56 CERCETARE<br />
MODUL SOFTWARE NATIONAL 218131 0.082722164 1982.54 164.00 1818.54 CERCETARE<br />
BLUE RAY 217542 0.083201597 3004.75 250.00 2754.75 CERCETARE<br />
PLAY STATION 3 BLU-RAY 218149 0.055622812 1833.78 102.00 1731.78 CERCETARE<br />
CALCULATOR DELL OPTIPLEX<br />
755 MINI 218159 0.041876389 3677.49 154.00 3523.49 CERCETARE<br />
CALCULATOR SYPERLINE CPU<br />
INTEL 217215 0.146280735 2249.10 329.00 1920.10 CERCETARE<br />
CALCULATOR SYPERLINE CPU<br />
INTEL 217216 0.146280735 2249.10 329.00 1920.10 CERCETARE<br />
SOFT- VISUAL STUDION<br />
STANDARD 217395 0.170222424 176.24 30.00 146.24 CERCETARE<br />
NOTEBOOK ELSACO INTEL<br />
CORE 2 DUO 217780 0.083396941 2829.84 236.00 2593.84 CERCETARE<br />
CALCULATOR COMRACE Z8W<br />
GREADER 217955 0.083886444 2717.96 228.00 2489.96 CERCETARE<br />
STATIE GRAFICA DELL<br />
PRECISION 218146 0.062520162 10508.61 657.00 9851.61 CERCETARE<br />
STATIE GRAFICA DELL<br />
PRECISION 218147 0.062520222 10508.60 657.00 9851.60 CERCETARE<br />
STATIE GRAFICA DELL<br />
PRECISION 218148 0.062520222 10508.60 657.00 9851.60 CERCETARE<br />
NOTEBOOK DELL INSPIRON<br />
1520, 217545 0.104286319 3308.20 345.00 2963.20 CERCETARE<br />
SISTEM ELSACO TIGER 3,2 217707 0.104581583 2199.24 230.00 1969.24 CERCETARE<br />
STATIE GRAFICA DELL<br />
PRECISION 218153 0.062584474 17017.00 1065.00 15952.00 CERCETARE<br />
NOTEBOOK LENOVO THINK<br />
PAD 218156 0.041817342 5021.84 210.00 4811.84 CERCETARE<br />
VIDEOPROIECTOR DELL<br />
PROJECTOR 320460 0.055457844 5048.88 280.00 4768.88 CERCETARE<br />
LAPTOP SONY VAIO VGNFZ 217698 0.103852862 6307 655 5652 CERCETARE<br />
LAPTOP SONY VAIO VGNFZ 217699 0.103852862 6307 655 5652 CERCETARE<br />
VIDEOPROIECTOR BENQ 320485 0.05500382 2618 144 2474 CERCETARE<br />
CALCULATOR PORTABIL 217697 0.104234176 9258 965 8293 CERCETARE<br />
DISPLAY PANASONIC 320482 0.084033613 2499 210 2289 CERCETARE<br />
VIDEOPROIECTOR CANON 320457 0.066741383 3176.44 212 2964.44 CERCETARE<br />
41
CALCULATOR ELSACO D930 3.0<br />
GHZ 217169 0.18834654 2330.81 439 1891.81 CERCETARE<br />
SISTEM DE VEDERE<br />
ARTIFICIALA 217207 0.116608875 20470.14 2387 18083.14 CERCETARE<br />
NOTEBOOK PANASONIC CF-19 217621 0.104110027 10997.98 1145 9852.98 CERCETARE<br />
TELEFON MOBIL GSM NOKIA<br />
N95 217229 0.095836087 2118.2 203 1915.2 CERCETARE<br />
TELEFON MOBIL GSM NOKIA<br />
N95 217230 0.095836087 2118.2 203 1915.2 CERCETARE<br />
TELEFON MOBIL GSM NOKIA<br />
N95 217231 0.095836087 2118.2 203 1915.2 CERCETARE<br />
TELEFON MOBIL GSM NOKIA<br />
N95 217232 0.095836087 2118.2 203 1915.2 CERCETARE<br />
TELEFON MOBIL GSM NOKIA<br />
N95 217233 0.095836087 2118.2 203 1915.2 CERCETARE<br />
NOTEBOOK ELSACO 217304 0.125507512 3967.89 498 3469.89 CERCETARE<br />
LAPTOP HP COMPAQ NX 7300 217307 0.124716553 2998.8 374 2624.8 CERCETARE<br />
LAPTOP HP COMPAQ NX 7300 217308 0.124716553 2998.8 374 2624.8 CERCETARE<br />
LAPTOP HP COMPAQ NX 7300 217309 0.124716553 2998.8 374 2624.8 CERCETARE<br />
LAPTOP HP COMPAQ NX 7300 217310 0.124716553 2998.8 374 2624.8 CERCETARE<br />
NOTEBOOK HP 6710 D 218038 0.083734561 3343.9 280 3063.9 CERCETARE<br />
NOTEBOOK HP 6710 D 218039 0.083734561 3343.9 280 3063.9 CERCETARE<br />
NOTEBOOK HP COMPAQ 8710 P 217398 0.125369067 4403 552 3851 CERCETARE<br />
SISTEM BIOREACTOR BIOSTAT<br />
PT.CULTURI 217507 0.083311852 48492.5 4040 44452.5 CERCETARE<br />
PLATFORMA DE DEZVOLTARE<br />
TIP ROBOT MOBIL 217695 0.069452127 29559.93 2053 27506.93 CERCETARE<br />
SISTEM DE TIP STRUCTURA<br />
INTELIGENTA 217696 0.069351112 42292.04 2933 39359.04 CERCETARE<br />
SISTEM DIDACTIC PE SENZORI 217282 0.082765436 4857.1 402 4455.1 CERCETARE<br />
CALCULATOR DESKTOP HUSK 218202 0 2103.19 0 2103.19 CERCETARE<br />
NOTEBOOK ASUS X51RL 218197 0 2698.08 0 2698.08 CERCETARE<br />
PACHET SOFT.PT.SIM.FUNCT.SI<br />
PRG.LAYOUT-URILOR 218239 0 12594.96 0 12594.96 CERCETARE<br />
VIDEOPROIECTOR BENQ 320515 0 2814.4 0 2814.4 CERCETARE<br />
CALCULATOR DESKTOP INTEL<br />
CORE 218215 0 3384.36 0 3384.36 CERCETARE<br />
IMPRIMANTA LASER COLOR 218217 0 2043.23 0 2043.23 CERCETARE<br />
IMPRIMANTA LASER COLOR 218218 0 2043.23 0 2043.23 CERCETARE<br />
CALCULATOR ELSACO 218179 0.020835968 6959.12 145 6814.12 V.P<br />
CALCULATOR 218176 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218177 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218178 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218175 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218170 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218171 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218172 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218173 0.020631007 1987.3 41 1946.3 V.P<br />
CALCULATOR 218174 0.020631007 1987.3 41 1946.3 V.P<br />
SERVER ELSACO 218183 0.020854951 15679.73 327 15352.73 V.P<br />
LAPTOP INSIRON 1521 218182 0.020790703 4569.35 95 4474.35 V.P<br />
SERVER ANTISPAM SI<br />
ANTIVIRUS 218181 0.020843957 7628.11 159 7469.11 V.P<br />
MASA CONSILIU 320506 0.006776904 2213.4 15 2198.4 V.P<br />
IMPRIMANTA LASER XEROX<br />
PHASER 217388 0.165558761 1993.25 330 1663.25 V.P<br />
IMPRIMANTA LASER A3 XEROX<br />
PHASER 5500 217389 0.166697114 5255.04 876 4379.04 V.P<br />
CALCULATOR ELSACO TIGER 217580 0.104671708 2388.42 250 2138.42 V.P<br />
CALCULATOR ELSACO TIGER 217581 0.104672146 2388.41 250 2138.41 V.P<br />
CALCULATOR ELSACO TIGER 217582 0.104672146 2388.41 250 2138.41 V.P<br />
COPIATOR DIGITAL XEROX 320412 0.082996161 1927.8 160 1767.8 V.P<br />
IMPRIMANTA A3 XEROX 217386 0.166450124 7173.32 1194 5979.32 V.P<br />
42
PHASER 5500<br />
LAPTOP TOSHIBA DATELLITE 217075 0.229022294 5571.51 1276 4295.51 V.P<br />
SERVER SYPERLINE 217187 0.145692952 4612.44 672 3940.44 V.P<br />
CALCULATOR ELSACO X2 217139 0.187618239 3837.58 720 3117.58 V.P<br />
IMPRIMANTA LASER XEROX<br />
PHASER 217387 0.165558761 1993.25 330 1663.25 V.P<br />
UPS APC SMART SURT 2000 XLI<br />
APC 218160 0.062130453 3862.84 240 3622.84 V.P<br />
UPS APC SMART SURT 2000 XLI<br />
APC 218161 0.062130775 3862.82 240 3622.82 V.P<br />
UPS APC SMART SURT 2000 XLI<br />
APC 218162 0.062130775 3862.82 240 3622.82 V.P<br />
UPS APC SMART SURT 2000 XLI<br />
APC 218163 0.062130775 3862.82 240 3622.82 V.P<br />
UPS APC SMART SURT 2000 XLI<br />
APC 218164 0.062130775 3862.82 240 3622.82 V.P<br />
CALCULATOR AMD ATHLON 218166 0.041216195 1892.46 78 1814.46 V.P<br />
COPIATOR - XEROX C118 CU 320502 0.036253439 2151.52 78 2073.52 V.P<br />
SURSA DE TENSIUNE 217122 0.221603002 3646.16 808 2838.16 V.P<br />
SURSA DE TENSIUNE 217123 0.221603002 3646.16 808 2838.16 V.P<br />
SURSA DE TENSIUNE 217124 0.221603002 3646.16 808 2838.16 V.P<br />
SURSA DE TENSIUNE 217125 0.221603002 3646.16 808 2838.16 V.P<br />
SOFT COREL DRAW GRAPHICS<br />
SUITE X3 217287 0.1680322 1535.42 258 1277.42 V.P<br />
SOFT ADOBE PHOTOSHOP CS3 217288 0.1680322 1535.42 258 1277.42 V.P<br />
SOFT ADOBE PHOTOSHOP CS3 217502 0.136588273 805.34 110 695.34 V.P<br />
SOFT ADOBE PHOTOSHOP CS4 217503 0.136589969 805.33 110 695.33 V.P<br />
SOFT DREAMWEAVER CS3 217504 0.136007133 661.73 90 571.73 V.P<br />
SOFT DREAMWEAVER CS4 217505 0.136009188 661.72 90 571.72 V.P<br />
MS OLP VFOX PRO 9.0 WIN32 217601 0.104821803 190.8 20 170.8 V.P<br />
MS OLP VFOX PRO 9.0 WIN32 217602 0.104821803 190.8 20 170.8 V.P<br />
MS OLP VFOX PRO 9.0 WIN32 217603 0.104821803 190.8 20 170.8 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217604 0.105540897 284.25 30 254.25 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217605 0.105540897 284.25 30 254.25 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217606 0.10554461 284.24 30 254.24 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217607 0.10554461 284.24 30 254.24 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217608 0.10554461 284.24 30 254.24 V.P<br />
OLP OFFICE PROFESSIONAL<br />
PLUS 2007 217609 0.10554461 284.24 30 254.24 V.P<br />
IMPRIMANTA HP LJ P3005 218165 0.041874322 2913.48 122 2791.48 V.P<br />
CALCULATOR 9DO3135 217180 0.167178944 4779.31 799 3980.31 V.P<br />
MASINA SLEFUIT BONA BLET<br />
250 MM 217255 0.050084034 17850 894 16956 V.P<br />
CALCULATOR ELSACO D930 217140 0.18834654 2330.81 439 1891.81 V.P<br />
CALCULATOR ELSACO D930 217141 0.18834654 2330.81 439 1891.81 V.P<br />
CALCULATOR ELSACO D930 217142 0.18834654 2330.81 439 1891.81 V.P<br />
SOFT-PACHET CAS 218206 0 5198 0 5198 V.P<br />
IMPRIMANTA HP P3005 218216 0 2359.77 0 2359.77 V.P<br />
SISTEM INTEGRAT MULTIMEDIA 218238 0 20904.65 0 20904.65 V.P<br />
DULAP APARATURA<br />
LABORATOR 320519 0 2618 2618 V.P<br />
COPIATOR DIGITAL CANON IR<br />
2016 320517 0 2538 0 2538 V.P<br />
TOTAL 641,130.58 590,575.58<br />
43
ANEXA Bb <strong>2008</strong><br />
LISTA ECHIPAMENTELOR CONTRACTATE SI IN CURS DE CONTRACTARE, DIN SURSE DE FINANTARE APROBATE,<br />
PE ANUL <strong>2008</strong><br />
Nr. Crt.<br />
Denumire imobilizare<br />
Valoare<br />
de intrare<br />
Valoare<br />
ramasa<br />
1 Monitor LCD touch screen 1,475.48 cercetare<br />
2 Sursa neintreruptibila UPS 600VA 130.90 cercetare<br />
3 Sursa neintreruptibila UPS 1000 VA 236.81 cercetare<br />
4 Osciloscop digital 7,500.00 cercetare<br />
5 Platforma experimentala NI ELVIS 15,000.00 cercetare<br />
6 Programator memorii flash 4,000.00 cercetare<br />
7<br />
Circuite emulatoare pentru testarea pe<br />
microcontroler a software-ului<br />
embedded 6,000.00 cercetare<br />
8<br />
9<br />
10<br />
11<br />
Circuite emulatoare pentru testarea<br />
software-ului embedded 6,300.00 cercetare<br />
Sistem de dezvoltare cu 4<br />
microcontrolere 3,000.00 cercetare<br />
Kit de dezvoltare pentru<br />
microcontrollere 6,000.00 cercetare<br />
Kit de dezvoltare pentru<br />
microcontrollere 8,000.00 cercetare<br />
12 Software dSpace TargetLink 14,218.00 cercetare<br />
13 Software DdSpace Mtest 7,000.00 cercetare<br />
14 Notebook 8,000.00 cercetare<br />
15 Sistem servodriver reductor armonic 1 13,000.00 cercetare<br />
16 Sistem servodriver reductor armonic 2 26,000.00 cercetare<br />
17 Sistem servodriver reductor armonic 3 26,000.00 cercetare<br />
18 Unitate de control pe 6 axe 3,600.00 cercetare<br />
Modul de control al axelor cu control<br />
19<br />
drive 6,000.00 cercetare<br />
20 Calculator portabil 5,000.00 cercetare<br />
21 Notebook 9,000.00 cercetare<br />
22 Placa grafica 5,000.00 cercetare<br />
23 Memorie interna DDR2 7,000.00 cercetare<br />
24 Notebook 28,050.00 cercetare<br />
25 Camera video cu DVD 2,200.00 cercetare<br />
26 Platforma experimentala Quanser 35,000.00 cercetare<br />
27 Echip. achizitii date NI 7,000.00 cercetare<br />
28 Sistem de calcul portabil 13,400.00 cercetare<br />
29 Calculator desktop 3,600.00 cercetare<br />
30 Software COMSOL MULTIPHYSICS 5,620.00 cercetare<br />
31 Notebook 6,000.00 cercetare<br />
32 Platforma dezvoltare aplicatii 28,204.00 cercetare<br />
33 Notebook 5,000.00 cercetare<br />
34 Amplif.pentru moptor pas cu pas 5,100.00 cercetare<br />
35 Amplif.pentru moptor pas cu pas 10,000.00 cercetare<br />
36 HDD 250 GB 185.00 cercetare<br />
37 Kit memorie 1 GB 100.00 cercetare<br />
38 Unitate optica 100.00 cercetare<br />
39 UPS 1000VA 700.00 cercetare<br />
40 Monitor LCD 20'' 700.00 cercetare<br />
41 Bol de macinare pulberi 7,084.00 cercetare<br />
42 Capac cu valve macinare pulberi 6,516.00 cercetare<br />
43 Osciloscop digital 7,500.00 cercetare<br />
Sursa de finantare<br />
44
44 Calculatoir 1,950.00 cercetare<br />
45 Switch Gigabit cu management 24,816.00 venituri proprii<br />
46 Modul Ethernet SFP 14,184.00 venituri proprii<br />
47 Calculator portabil 3,700.00 venituri proprii<br />
48 Calculator portabil 400.00 venituri proprii<br />
Platforma dezvoltare aplicatii cu<br />
49 biblioteca MATLAB 3,963.18 venituri proprii<br />
50 Bol macinare pulberi 2,636.00 venituri proprii<br />
TOTAL 411,169.37<br />
45
ANEXA C<br />
Nr.<br />
crt.<br />
Denumire echipament planificat a fi<br />
achizitionat<br />
Stare<br />
1/2/3<br />
Locatie (laboratorul in care se<br />
gaseste echipamentul)<br />
Valoare estimata (lei)<br />
Valoare platita<br />
(lei)<br />
1. Calculator cu facilitati multimedia 1 M-MMM; M-IPAC; A-MMA; 72X4000 RON/bucata 266771<br />
2. MSOffice Student and Teacher<br />
Edition<br />
1<br />
M-MMM; M-IPAC; A-MMA; 20X500 RON/bucata 8396<br />
3. Antivirus BitDefender Professional<br />
Edition V8<br />
1<br />
M-MMM; M-IPAC; A-MMA; 60X115 RON/bucata 2287<br />
4. Server backup 1 M-MMM; A-PSN; 2X14000 RON/bucata 23372<br />
5. Server acces 1 M-MMM; A-PSN; 2X12000 RON/bucata 16446<br />
6. Imprimanta de retea laser alb-negru<br />
A3<br />
1<br />
M-MMM; A-PSN; 2X7000 RON/bucata 18160<br />
7.<br />
1 S-au achizitionat din fonduri<br />
Imprimanta laser color A3<br />
proprii 2X21000 RON/bucata 0<br />
8. Copiator color A3<br />
1<br />
(copiere/printare/scanare)<br />
M-MMM; A-PSN; 2X21000 RON/bucata 50204<br />
9. Plotter color 1 M-MMM; 1X25000 RON/bucata 23203<br />
10. Cameră Video Profesională 3CCD 1 M-PIRF; 1X12000 RON/bucata 12020<br />
11.<br />
Scanner<br />
2 Se va utiliza echipamentul de<br />
la punctul 6 care are si functia<br />
de scanare 0 0<br />
12. Monitor cu plasma 1 M-MMM; 1X17000 RON/bucata 15341<br />
13. Sistem Home Cinema: DVD Recorder<br />
Cinema Digital<br />
1<br />
M-MMM; 1X3000 RON/bucata 4081<br />
14. Matlab 1 A-MMA; A-SEC; A-IPA; 1X100000 RON/bucata 86676<br />
15. Soft specializat multimedia: editare<br />
neliniara de imagini<br />
1<br />
M-PIRF; 1X380 RON/bucata 0<br />
16. Soft specializat multimedia:<br />
dezvoltarea de aplicatii e-learning<br />
1<br />
M-MMM; 1X16500 RON/bucata 14867<br />
17.<br />
1<br />
2X21000 RON/bucata<br />
Videoproiector<br />
M-MMM; A-MMA;<br />
40936<br />
TOTAL <strong>2006</strong> 582761 lei<br />
18. Platforma mecatronica Lego cu 10 1<br />
posturi de lucru<br />
M-eM; M-MSI; 1X12000 RON/bucata 11900<br />
19. Sistem de instruire cu roboti bipezi 1 M-eM; M-MSI; 1X10500 RON/bucata 10138<br />
20. Sistem de instruire cu roboti sumo 1 M-eM; M-MSI; 1X16500 RON/bucata 11183<br />
21. Sistem de instruire cu roboti 1<br />
configurabili<br />
M-eM; M-MSI; 1X10000 RON/bucata 100916<br />
22.<br />
1 M-MMM; M-IPAC;M-CSR; M-<br />
Tabla interactiva<br />
RSFF; M-SI; 5X6200 RON/bucata 20059<br />
23. Sistem didactic de dezvoltare cu 1<br />
microcontroler pentru aplicaţii<br />
multimedia cu 8 posturi lucru<br />
M-SI; 1X11200 RON/bucata 12587<br />
24. Sistem didactic pentru emulatorul 1<br />
JTAG de tip in-circuit (JTAG ICE) cu 4<br />
posturi de lucru<br />
M-SI; 1X3400 RON/bucata 3921<br />
25. Analizor cu mai multe canale pentru 1<br />
magistrale de tip CAN (Controller<br />
Area Network)<br />
M-SI; 1X55000 RON/bucata 53216<br />
26. Monitor TFT 17” cu touch screen 1<br />
incorporat<br />
M-SI; M-eM; M-MSI; 4X2000 RON/bucata 13946<br />
27. Monitor TFT 19” cu touch screen 1 M-SI; M-eM; M-MSI; 3X2333 RON/bucata 14065<br />
28. Statie automatizata de inspectie video 1<br />
cu sistem de vedere artificiala pentru<br />
controlul montării prin înşurubare<br />
(SMC).<br />
M-CSR; 1X120000 RON/bucata 116108<br />
29. Braţ manipulator articulat orizontal tip 1<br />
SCARA cu 4 grade de libertate<br />
M-IPAC; 1X100000 RON/bucata 99960<br />
30. Sistem de instruire pentru studiu 1<br />
automate si terminale programabile<br />
M-AP; 1X19000 RON/bucata 17856<br />
31. Software SCADA 1 M-AP; 8X2500 RON/bucata 19557<br />
32. Sistem de instruire automat si 1<br />
terminal programabil: „all in one“<br />
M-AP; 2X2650 RON/bucata 5047<br />
33. Sistem de instruire Invertor + Motor 1 M-AP; 1X2000 RON/bucata 1810<br />
34. Sistem de instruire pentru regulator<br />
de proces<br />
1<br />
M-AP; 1X2000 RON/bucata 2011<br />
35. Sistem de instruire SERVO 1 M-AP; 1X8250 RON/bucata 7216<br />
36. Sistem de instruire pentru inspectie<br />
vizuala<br />
1<br />
M-AP; 1X33000 RON/bucata 30877<br />
37. Sistem de instruire pentru senzori: 1 M-AP; 1X3500 RON/bucata 3190<br />
46
senzori de proximitate inductivi si<br />
capacitivi. senzori optici: cu reflexie<br />
pe obiect, cu reflexie în oglinda,<br />
emitator-receptor, encoder;<br />
38. Robot pe o axa (axa liniara) 1 M-AP; 2X5600 RON/bucata 10844<br />
39. Robot SCARA – cu controler 1<br />
specializat pentru 4 axe cu functii de<br />
interpolare liniara si circulara<br />
M-AP; 1X45000 RON/bucata 44774<br />
40. Sistem de comanda servo pe 4 axe 1<br />
cu functii de interpolare liniara si<br />
circulara, programare în cod G<br />
M-AP; 1X4800 RON/bucata 15557<br />
41. Platforma de dezvoltare tip robot 1<br />
mobil<br />
M-AP; 1X37500 RON/bucata 29418<br />
42. Sistem flexibil de fabricatie format din 1<br />
4 statii<br />
M-AP 1X82500 RON/bucata 68814<br />
43. Analizor pentru diagnoza erorilor. 1<br />
optimizare. analiza si inregistrare pe<br />
termen lung. dedicat diverselor<br />
automate programabile<br />
M-AP; 1X13200 RON/bucata 13090<br />
44. Stand holografic 3D 1 M-AP; M-PIRF; 2X5000 RON/bucata 10997<br />
45. Dispozitiv de tracking cu precizie<br />
superioara si stabilitate.<br />
1<br />
M-AP; M-PIRF; 2X7000 RON/bucata 15998<br />
46. Casca virtuala stereo 3D 1 M-AP; M-PIRF; 2X1900 RON/bucata 3796<br />
47. Casca virtuala 5DT 3D Stereo 1 M-AP; M-PIRF; 2X20000 RON/bucata 41997<br />
48. Dispozitiv haptic de tip PHANTOM cu<br />
6 grade de libertate<br />
1<br />
M-AP; M-PIRF; 2X8000 RON/bucata 17997<br />
49. Manusa virtuala wireless cu 5 senzori<br />
si pachet software inclus – mana<br />
dreapta<br />
1<br />
M-AP; M-PIRF; 2X2500 RON/bucata 5978<br />
50. Manusa virtuala wireless cu 5 senzori<br />
si pachet software inclus – mana<br />
stanga<br />
1<br />
M-AP; M-PIRF; 2X2500 RON/bucata 5978<br />
51. Sistem de programe de instruire in<br />
mecatronica<br />
1<br />
M-RSFF; 1X21000 RON/bucata 9198<br />
52. Terminal de operare grafica cu ecran<br />
senzorial<br />
1<br />
M-AP; 1X13000 RON/bucata 15588<br />
53. Sistem de proiectii 3D 1 M-AP; 1X21000 RON/bucata 19997<br />
54. Instrument portabil pentru tabla 1<br />
magnetica alba<br />
M-MMM; M-IPAC; 2X3730 RON/bucata 4263<br />
55. Sistem de instruire in mecatronica: 2<br />
machete, module si componente<br />
1X65000 RON/bucata 0<br />
56. Statie automatizare de asamblare tip 1<br />
SMC MAP 2005<br />
M-CSR; 1X44000 RON/bucata 44030<br />
57. Statia automatizata de transfer a 1<br />
semifabricatelor<br />
M-CSR; 1X40000 RON/bucata 40341<br />
58. Statie didactica de imbuteliere 1 M-RSFF; 1X54000 RON/bucata 54866<br />
59. Sistem flexibil de fabricatie 1 M-RSFF; 1X200000 RON/bucata 199735<br />
60. Platformă experimentală pentru 1<br />
experimente de control de tip<br />
deplasare liniară Quanser: - HIGH<br />
FIDELITY LINEAR CART SYSTEM<br />
(with 10 EXPERIMENTS). HFLC -<br />
High Fidelity Linear Cart<br />
A-MMA; A-SEC; A-IPA; 1X62000 RON/bucata 100412<br />
61. Platformă experimentală pentru 1<br />
experimente de control de tip<br />
deplasare unghiulară (rotative)<br />
Quanser: ROTARY FAMILY<br />
PACKAGE (7 EXPERIMENTS)<br />
A-MMA; A-SEC; A-IPA; 1X52000 RON/bucata 63624<br />
62. Platformă experimentală de control al 1<br />
nivelului Quanser - COUPLED TANK<br />
SYSTEM<br />
A-SEC; A-SAN; 2X26000 RON/bucata 66943<br />
63. Simulator Quanser pentru procese 1<br />
analogice - ANALOG PLANT<br />
SIMULATOR<br />
A-SEC; 4X6000 RON/bucata 26928<br />
64. Platformă National 1<br />
Instruments/Quanser<br />
NI<br />
ELVIS/Quanser HVAC Trainer Bundle<br />
A-IVIR; A-IPA; A-SEC; 8X12500 RON/bucata 109622<br />
65. Platformă National 1<br />
Instruments/Quanser<br />
NI<br />
ELVIS/Quanser DC Motor Control<br />
Bundle<br />
A-IVIR; A-IPA; A-SEC; 6X12500 RON/bucata 82217<br />
66. Platformă National Instruments (NI) 1<br />
ELVIS Instrumentation. Data<br />
Acquisition. and Prototyping for Labs<br />
A-IVIR; A-IPA; A-SEC; 6X8600 RON/bucata 56313<br />
47
67. Osciloscoape Tektronix TDS 3012B 1 A-SAN; A-IVIR; 4X13000 RON/bucata 51138<br />
68. Osciloscoape Tektronix TDS 1002B 1 A-SAN; A-IVIR; A-CPI; 6X3000 RON/bucata 15563<br />
69. Generatoare de semnal Tektronix<br />
AFG 3022<br />
1<br />
A-SAN; A-IVIR; 4X8300 RON/bucata 32988<br />
70. Generatoare de semnal Tektronix<br />
AFG 3102<br />
1<br />
A-SAN; A-IVIR; 2X15000 RON/bucata 29748<br />
71. Sistem didactic electropneumatic 1<br />
SMC<br />
A-SHP; 1X45240 RON/bucata 43673<br />
72. Platformă didactică pneumatică SMC 1<br />
Basic pneumatics composition PNEU-<br />
201<br />
A-SHP; 1X10800 RON/bucata 10353<br />
73. Platformă didactică pneumatică SMC 1<br />
Advanced pneumatics composition<br />
PNEU-202<br />
A-SHP; 1X20800 RON/bucata 20111<br />
74. Platformă didactică electropneumatică 1<br />
SMC Advanced electropneumatics<br />
PNEU-204<br />
A-SHP; 1X29000 RON/bucata 28143<br />
75. Pachet software Classroom Kit 20-sim 1<br />
3.6 Professional (biblioteci:<br />
Bondgraph. Signal/block diagram.<br />
Electric. Hydraulic. Mechanical<br />
rotation. Mechanical translation.<br />
Thermal)<br />
A-SHP; 1X16000 RON/bucata 19759<br />
76. Sistem de calcul, achiziţie şi control 1<br />
de timp real tip National Instruments<br />
LabVIEW RT for Windows/PCI-7041/<br />
6040E Bundle<br />
A-SAN; A-IVIR; 4X16000 RON/bucata 66087<br />
77. Sistem de instruire pentru regulatoare 2<br />
numerice WEST Instruments cu 6<br />
posturi de lucru (regulatoare<br />
numerice, multimetre, senzori etc.)<br />
A-IVIR; 1X18000 RON/bucata 0<br />
78. Sistem multifuncţional de control şi 1<br />
achiziţie dSPACE<br />
A-SEC; A-MMA; 2X100000 RON/bucata 208561<br />
79. Echipament de laborator pentru 1<br />
simularea si studiul sistemelor<br />
automate distribuite (cu controlere<br />
industriale) GUNT<br />
A-CPI; 1X48000 RON/bucata 45141<br />
80. Echipament de laborator pentru 1<br />
simularea si studiul retelelor de camp<br />
(cu controlere industriale) GUNT<br />
A-CPI; 1X52000 RON/bucata 47635<br />
81. Calculatoare performante cu facilităţi 1<br />
de prelucrare grafică deosebite<br />
(memorie. procesor. placă grafică)<br />
A-CPI; 4X5000 RON/bucata 11878<br />
82. NI LabVIEW Department Teaching 1<br />
License + Circuit Design and<br />
Simulation Software Option<br />
A-MMA; A-SEC; A-IPA; A-IVIR; 1X52500 RON/bucata 54897<br />
83. Sistem de achiziţie a datelor cu 6 1<br />
posturi de lucru National Instruments<br />
(plăci de achiziţie NI PCI-6251.<br />
module SCXI. senzori etc.)<br />
A-IVIR; A-IPA; A-SEC 1X42000 RON/bucata 43811<br />
84. Sistem de dezvoltare minimodul cu 6 1<br />
posturi tip 537/517/509 (Phytec)<br />
A-SEC; A-SAN; 1X6000 RON/bucata 6701<br />
85. NeuroSolutions University Site 1<br />
License + NeuroSolutions ADD-ons:<br />
NeuroSolutions for Matlab<br />
A-PSN; 1X21000 RON/bucata 20567<br />
TOTAL 2007 2491662 lei<br />
86. Sistem de scanare laser 3D: scaner 1<br />
laser, PC si program de scanare,<br />
transfer si prelucrare a datelor (similar<br />
HDS Leica Geosystems).<br />
M-IPAC; 1X285000 RON/bucata 278885<br />
87. Sistem de programe de proiectare 1<br />
asistata (similar AutoCAD 2009:<br />
Inventor si Electrical)<br />
M-MMM; M-IPAC; 1X35000 RON/bucata 8321<br />
88. Imprimanta laser 3D (similar ZPrinter 1<br />
310)<br />
M-IPAC; 1X100000 RON/bucata 84008<br />
89. Robot industrial (similar Kuka) 1 M-IPAC; 1X115000 RON/bucata 84802<br />
90. Set gripere electric 1 M-IPAC; 1X10000 RON/bucata 9773<br />
91. Set gripper pneumatic 1 M-IPAC; 1X10500 RON/bucata 10377<br />
92. Interfata ethertnet 1 M-IPAC; 1X6000 RON/bucata 5529<br />
93. Automat programabil (similar Allan<br />
Bradley)<br />
1<br />
M-AP; 1X2500 RON/bucata 3201<br />
94. Platformă experimentală de instruire<br />
pentru animatie grafica (similar Lab-<br />
1<br />
M-MMM; 1X7000 RON/bucata 6997<br />
48
Volt 40003-60)<br />
95. Platformă experimentală de instruire<br />
pentru in inteligenta artificiala (similar<br />
Lab-Volt 40085-60)<br />
96. Platformă experimentală de instruire<br />
pentru proiectarea aplicatiilor grafice<br />
(similar Lab-Volt 40008-60)<br />
97. Platformă experimentală de instruire<br />
pentru aplicatii de editare a<br />
secventelor video TV numerice<br />
(similar Lab-Volt 40025-60)<br />
98. Platformă experimentală pentru<br />
depanarea şi serviceul sistemelor de<br />
calcul (similar Lab-Volt 40021-65)<br />
99. Platformă experimentală de instruire<br />
pentru aplicatii de productie video<br />
(similar Lab-Volt 40026-65)<br />
100. Sisteme de calcul cu facilităţi<br />
multimedia performante<br />
101. Platformă experimentală de instruire<br />
pentru echipamente hidraulice (similar<br />
Lab-Volt 6080)<br />
102. Pachet software de simulare a<br />
circuitelor hidraulice complexe (similar<br />
LVSIM-HYD 6385 Lab-Volt)<br />
103. Platformă experimentală de instruire<br />
asistată de calculator a sistemelor<br />
electromecanice (similar Lab-Volt<br />
8006)<br />
104. Pachet software de simulare a<br />
sistemelor electromecanice (similar<br />
LVSIM-EMS 6970 Lab-Vol)<br />
105. Platformă experimentală de instruire<br />
pentru controlul proceselor (debit,<br />
presiune, nivel, pH etc.), cu software<br />
LVPROSIM (similar Lab-Volt 6090)<br />
106. Platformă experimentală de control al<br />
debitului şi temperaturii, cu software<br />
LVPROSIM (similar Lab-Volt 3522-A)<br />
107. Platformă experimentală de instruire<br />
pentru echipamente şi tehnologii de<br />
tratare a apei (similar Environmental<br />
Technology/Water 40017 Lab-Volt)<br />
108. Pachet software de simulare a<br />
comunicaţiilor analogice (similar<br />
LVSIM-ACOM 9480 Lab-Volt)<br />
109. Pachet software de simulare a<br />
comunicaţiilor numerice (similar<br />
LVSIM-DCOM 9481 Lab-Volt)<br />
110. Adobe Creative Suite 3 Web<br />
Premium 3.0 IE Win Edu license<br />
111. Sistem de vedere artificiala pentru<br />
robotica<br />
112. Sistem ultrarapid de achizitie si<br />
stocare a imaginilor<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
M-MMM; 1X23000 RON/bucata 22996<br />
M-MMM; 1X12000 RON/bucata 11995<br />
M-MMM; 1X5000 RON/bucata 4998<br />
M-MMM; 1X15000 RON/bucata 14994<br />
M-MMM; 1X14000 RON/bucata 13994<br />
M-PIRF; M-EHP; 2X8000 RON/bucata 16260<br />
A-SHP; 1X48000 RON/bucata 47998<br />
A-SHP; 1X8000 RON/bucata 7996<br />
A-MMA; 1X71000 RON/bucata 70995<br />
A-MMA; 1X15000 RON/bucata 14994<br />
A-SEC; 1X78000 RON/bucata 77998<br />
A-SEC; 4X16000 RON/bucata 63998<br />
A-SEC; 1X17000 RON/bucata 16999<br />
A-CPI; 1X19500 RON/bucata 19499<br />
A-CPI; 1X19500 RON/bucata 19499<br />
A-MMA; 1X2000 RON/bucata 19116<br />
M-IPAC; 1X36000 RON/bucata 35938<br />
M-PIRF; 1X21000 RON/bucata 26025<br />
TOTAL <strong>2008</strong> 998195 lei<br />
TOTAL <strong>2006</strong>-<strong>2008</strong><br />
4072618 lei<br />
1- echipamente planificate si achizitionate<br />
2- echipamente planificate si neachizitionate<br />
3- echipamente achizitionate dar care nu s-au regasit pe lista initiala de achizitii<br />
49
ANEXA D<br />
A. Granturi internaţionale:<br />
1. FREESUBNET “A European research network on key technologies for intervention autonomous<br />
underwater vehicles”- MRTN-CT-<strong>2006</strong>-036186, ( <strong>2006</strong> – 2010), 16 parteneri colective de cercetare<br />
din ţările membre EU, valoare totală contract: 3.284.786 Euro, valoare subcontract parte română:<br />
126.219 Euro (), responsibil colectiv român: prof. dr. ing. Dorian Cojocaru.<br />
2. EURON: „European Robotics Network” – <strong>2006</strong>-<strong>2008</strong>, (Project FP6 - 507728), 150 parteneri, 25<br />
de ţări.<br />
3. EIE-Surveyor: „Reference Point For Electrical And Information Engineering in Europe” , 2005-<br />
<strong>2008</strong>, Project Nr. 225997-CP-1-2005-1-FR-ERASMUS-TNPP (Project Socrates - funded by the<br />
European Commission), peste 100 de parteneri din Europa.<br />
4. ECO-NET DIE: „Dynamique – Interconnexions – Environnement”, contract de cercetare<br />
internaţională no. 12645SD, Egide, Franţa, <strong>2006</strong>-2007, 11 parteneri. Universitatea din Craiova cu<br />
responsabil V. Răsvan, valoare Craiova <strong>2006</strong> – 2007: 16000 Euro.<br />
5. „STUDIUL INTRODUCERII TEHNOLOGIILOR RFID IN PROCESELE INDUSTRIALE SI, IN<br />
PARTICULAR, LA COMPANIA PIRELLI TYRES S.P.A. SLATINA”, in valoare de 10 000 EUR<br />
beneficiarul cercetarii fiind fundaţia SILVIO TRONCHETTI PROVERA (fundaţia prin care grupul<br />
Pirelli finanţează cercetarea ştiinţifica la nivel academic). In afara bugetului contractului Pirelli Tyres<br />
Romania a mai achizitionat pentru facultate echipamente (un cititor RFID UHF de ultima generatie si<br />
un mare numar de tag-uri RFID) in valoare de cca. 1500 EUR.<br />
B. Fonduri atrase prin colaborare internaţională:<br />
1. In cadrul colaborării bilaterale firma Turck Automation a oferit in folosinţa pe o durata<br />
nedeterminata echipamente in valoare de peste 3000 EUR, colectivul din cadrul Facultatii demarand<br />
un program de studii si experimentari in vederea aplicarii tehnologiei in cadrul uzinei Pirelli Slatina<br />
2. Fujitsu Microelectronics Europe –FME (Germania) a donat facultatii 10 sisteme de dezvoltare<br />
cu microcontrolere utilizate in industria automobilului si cu conectivitate CAN bus impreuna cu<br />
software-ul aferent, in valoare de peste 5000 EUR.<br />
3. Firma Pirelli Tyres Romania a achizitionat pentru facultate echipamente: un cititor RFID UHF de<br />
ultima generatie si un mare numar de tag-uri RFID, in valoare de cca. 1500 EUR.<br />
C. Granturi naţionale:<br />
<strong>2006</strong>: 604.739 lei<br />
2007: 1.942.443 lei<br />
<strong>2008</strong>: 2.457.447 lei<br />
TOTAL: 5.004.629 lei (50,04 miliarde lei vechi, aproximativ 1.300.000 EURO)<br />
Obs.:<br />
1. Contractele derulate în anul <strong>2006</strong>, au beneficiat în etapa finală de utilizarea facilităţilor<br />
platformei.<br />
2. La fiecare poziţie sunt specificate echipamentele utilizate în cadrul grantului - prin numărul<br />
de ordine din tabelul centralizator al echipamentelor achiziţionate din <strong>Raport</strong>ul Financiar al<br />
<strong>PCFI</strong>.<br />
1. Platformă de control holonic al fabricaţiei cu roboţi multipli şi vedere artificială integrată pentru<br />
condiţionarea materialelor - RVHOLON, contractul CEEX AMCSIT Nr. 146/20.07.<strong>2006</strong> ; valoare:<br />
40.000 lei în <strong>2006</strong>, 115.000 lei în 2007 si 85.000 lei în <strong>2008</strong>; responsabil local: prof. dr. ing. Mircea<br />
Ivănescu. [28, 36, 37, 38, 39, 55, 111, 112]<br />
50
2. Cercetări privind miniroboţii mobili cu locomoţie bazată pe mişcare pendulară – ROBOPEND,<br />
contractul CEEX AMCSIT Nr. 90 / 31.07.<strong>2006</strong> ; valoare: 10.000 lei în <strong>2006</strong>, 50.000 lei în 2007 şi<br />
80.000 lei în <strong>2008</strong>; responsabil local: prof. dr. ing. Mircea Ivănescu. [23, 40, 41]<br />
3. Platforme robot-vedere artificială autonome, inteligente de calificare, sortare/prelucrare/ambalare şi<br />
inspecţie de calitate a produselor cu arhitectură de control holonic, orientate pe servicii, bazată pe<br />
trasaturi – SOFHICOR, contract PARTENERIAT Nr. 11-042/18.09.2007, subcontract de colaborare<br />
661/14.09.2007 ; valoare: 50.000 lei în 2007 şi 60.000 lei în <strong>2008</strong>; responsabil local: prof. dr. ing.<br />
Mircea Ivănescu. [28, 36, 37, 38, 39, 55, 58, 86, 95, 111]<br />
4. Partajarea resurselor de instruire şi de cercetare, contract în programul naţional CEEX, nr. 24<br />
CEEX-I03/10.10.2005, număr înregistrare <strong>UCV</strong>: 50C/7.10.2005. beneficiar: M.C.T.; valoare: 71.813<br />
lei in <strong>2006</strong>, 61.687 lei în 2007 şi 21.450 lei în <strong>2008</strong>; director de proiect: prof. dr. ing. Mircea<br />
Ivănescu.[18-23, 29-43, 88]<br />
5. Sisteme avansate de comunicaţii mobile pentru platforme robotice reconfigurabile, autonome –<br />
SACOM, program CEEX, Modulul I, Nr. 96 / <strong>2006</strong>, beneficiar: AMCSIT - Programul CEEX;<br />
valoare: 105.000 lei în <strong>2006</strong>, 231.997 în 2007 şi 350.304 lei în <strong>2008</strong>; <strong>2006</strong>-<strong>2008</strong>; Director: Prof. dr.<br />
ing. Mircea Ivănescu; [25, 41, 89, 90, 91]<br />
6. Dezvoltarea cunoaşterii asupra elaborării şi microprocesării prin metalurgia pulberilor a<br />
materialelor nanostructurate pentru componente MEMS - PRONANOMAT, program CEEX, Modulul<br />
I, Nr. /85/<strong>2006</strong> (1592); beneficiar: AMCSIT - Programul CEEX; 28.000 lei în 2007; 122.000 lei în<br />
<strong>2008</strong>; responsabil local: prof. dr. ing. Mircea Ivănescu. [31, 43, 88]<br />
7. Sistem robotic miniatural cu abilităţi de reconfigurare şi automultiplicare - ROMAR, Program<br />
CEEX, Modulul I, Nr. 91/31.07.<strong>2006</strong>; beneficiar: AMCSIT - Programul CEEX; valoare: 20.160 lei in<br />
<strong>2006</strong> şi 70.130 lei în 2007; <strong>2006</strong>-<strong>2008</strong>; responsabil local: prof. dr. ing. Mircea Ivănescu. [18-23, 111]<br />
8. Controlul şi integrarea tehnologică a materialelor şi structurilor inteligente – CITMSI, Program<br />
CEEX, Modulul I, Nr. 259/<strong>2006</strong>; beneficiar: AMCSIT - Programul CEEX; <strong>2006</strong>-<strong>2008</strong>; valoare:<br />
38.277 lei în <strong>2006</strong>, 148.338 în 2007 şi 195.993 lei în <strong>2008</strong>; responsabil local: prof. dr. ing. Mircea<br />
Ivănescu. [18-23, 88]<br />
9. Tehnici fuzzy pentru sisteme şi procese cu aplicabilitate în societatea informaţională, beneficiar:<br />
CNCSIS, Act adiţional GR155/04.05.<strong>2006</strong>, cod 100, tema 7; valoare: 35.000 lei în <strong>2006</strong>; director de<br />
proiect: prof. dr. ing. Dorian Cojocaru. [28, 36, 37, 38, 39, 55]<br />
10. Tehnici fuzzy pentru sisteme şi procese cu aplicabilitate în societatea informaţională, beneficiar:<br />
CNCSIS, Contract nr. 26C/17.04.2007, cod 100, tema 9; valoare: 25.000 lei în 2007; director de<br />
proiect: prof. dr. ing. Dorian Cojocaru. [28, 36, 37, 38, 39, 55]<br />
11. Modele şi metode pentru controlul vizual al roboţilor hiperredundanţi, grant cu Academia Română<br />
GAR 100/09.08.2007, înregistrat la Universitatea din Craiova cu numărul 4174/03.08.2007; valoare:<br />
12.500 lei în 2007 şi 12.500 lei în <strong>2008</strong>; director de proiect: prof. dr. ing. Dorian Cojocaru. [28, 36, 37,<br />
38, 39, 55, 99, 111]<br />
12. Controlul roboţilor tentaculari bazat pe vedere artificială, grant CNCSIS PN II IDEI<br />
102/01.10.2007, cu titlul, înregistrat la Universitatea din Craiova cu numărul 45C/27.09.2007; valoare:<br />
50.000 lei în 2007 şi 116.234 lei în <strong>2008</strong>; director de proiect: prof. dr. ing. Dorian Cojocaru. [28, 36,<br />
37, 38, 39, 55, 100, 111, 112]<br />
13. Abordarea concurenţială a modularizării sistemelor robotice - contract de cercetare CNCSIS cod<br />
620, tema 1, nr. 29 C, valoare: 91.200 lei în 2007 şi 85.300 lei în <strong>2008</strong>; dir. de proiect: prof. dr. ing.<br />
Nicu Bîzdoacă. [18-23, 42, 56-58, 92, 95]<br />
14. Sisteme încorporate tip neuroproteză pentru recuperarea persoanelor cu handicap neuromotor –<br />
SINPHA, Programul PNCDI II – modulul Parteneriate, valoare: 17.480 lei în 2007 şi 130.134 lei în<br />
<strong>2008</strong>; responsabil local: conf. dr. ing. Dorin Popescu. [38-41, 43, 44-53, 93]<br />
15. Promovarea cercetării în automatică şi robotică în scopul integrării în reţele europene şi<br />
internaţionale de cercetare. CEEX 14, modulul III, competiţia 2, nr <strong>UCV</strong>: 3C/27.01.<strong>2006</strong>; beneficiar:<br />
M.C.T., <strong>2006</strong>-2007; valoare 93.149 RON în <strong>2006</strong> şi 102.000 lei în 2007; director de proiect: conf. dr.<br />
ing. Dorin Popescu; [30-53]<br />
16. Algoritmi de conducere a roboţilor păşitori în regim de defect – grant CNCSIS PN II Resurse<br />
Umane, cod TD 29-2007, valoarea: 4.291 lei în 2007 şi 13.166 lei în <strong>2008</strong>; director de proiect: asist.<br />
drd. ing. Cristina Floriana Pană. [18-23]<br />
51
17. Metode şi algoritmi de identificare a sistemelor neliniare în timp continuu, Contract PNCDI II,<br />
Programul: IDEI, Tipul proiectului: Proiecte de cercetare exploratorie, Cod CNCSIS ID 786, 2007-<br />
2010, Universitatea din Craiova - UEFISCSU, nr. înreg. <strong>UCV</strong> 66C/08.10.2007, nr. înreg. UEFISCSU<br />
358/08.10.2007, valoare totală 941.850 RON, 2007: 100.625 RON, valoare <strong>2008</strong>: 266.800 lei,<br />
director: C. Marin. [59-61, 63-69, 74, 80, 105-106]<br />
18. Sisteme integrate de conducere în timp real în reţea a proceselor – SICOTIR, Contract PNCDI II,<br />
Programul: Parteneriate în domenii prioritare, 2007-2010, nr. înreg. CNMP 05D7/18.09.2007, nr.<br />
înreg. contractor 58C/14.09.2007, Universitatea din Craiova - MECT – CNMP, (parteneri<br />
Universitatea Politehnică din Timişoara, Universitatea Tehnică Cluj-Napoca, S.C. Elprest SRL<br />
Craiova), valoare pentru Universitatea din Craiova, 2007: 47.150 RON, valoare <strong>2008</strong>: 313.580 lei,<br />
director: C. Ionete. [59-69, 75-78, 80, 82, 103-104]<br />
19. Proceduri avansate de modelare, identificare şi conducere neliniară a proceselor biochimice şi<br />
biotehnologice pentru îmbunătăţirea calităţii apei, Contract nr. 29C/08.05.2007, Cod CNCSIS 621,<br />
Tema 13, director: E. Petre, valoare 2007: 75.000 RON, valoare <strong>2008</strong>: 73.000 lei. [61, 62, 63, 70, 74,<br />
80, 81, 101-102, 107]<br />
20. Îmbunătăţirea indicatorilor calitativi la tratarea biologică a apelor reziduale din industria<br />
alimentară pe baza unor sisteme de conducere avansată - APEPUR, Contract de Excelenţă CEEX<br />
<strong>2006</strong>-<strong>2008</strong>, MENER nr. 717/P1/24.07.<strong>2006</strong>, modulul I, (Universitatea „Dunărea de Jos” din Galaţi,<br />
<strong>UCV</strong> etc.), valoare pentru <strong>UCV</strong>: 275.000 RON, valoare <strong>2008</strong>: 155.000 lei, responsabil Craiova: E.<br />
Petre, valoare 2007: 113.000 RON. [61-63, 70, 74, 80, 81, 105, 107]<br />
21. Sistem de analiză şi calcul a semnalelor din reţele electrice poluate şi comandă a filtrelor active<br />
pentru compensarea armonicilor - SACSCFA, Contract de Excelenţă CEEX 4049/<strong>2006</strong>, program<br />
Cercetare de excelenţă, modulul I, contractor ICMET Craiova (Responsabil proiect Universitatea din<br />
Craiova: Dan Popescu), valoare (pentru Universitatea din Craiova): 244.400 RON, durata 3 ani: <strong>2006</strong>–<br />
<strong>2008</strong>, valoare <strong>2006</strong>: 10.000 RON, valoare 2007: 54.000 RON. [65-69, 74, 75, 76, 78, 82]<br />
22. Prevenirea cuplajelor pilot-elicopter (om-maşină) în manevre critice la bordul navelor şi<br />
platformelor marine - ELICOMNAV, Contract de Excelenţă CEEX, modulul I, nr. 449/06.11.<strong>2006</strong>,<br />
contractor SC STRAERO S.A. Bucureşti, subcontract Universitatea din Craiova nr. 259/26.07.<strong>2006</strong><br />
(Responsabil proiect Universitatea din Craiova: Dan Popescu), durata 3 ani: <strong>2006</strong>–<strong>2008</strong>, valoare Univ.<br />
Craiova <strong>2006</strong>: 15.000 RON, valoare Univ. Craiova 2007: 45.000 RON. [59, 60, 62, 65-69, 74-76, 80,<br />
83, 110].<br />
23. Metode moderne de conducere adaptivă, vibraţională şi alunecătoare a sistemelor neliniare.<br />
Aplicaţii la bioprocese de depoluare, 2005-<strong>2006</strong>, beneficiar Ministerul Educaţiei şi Cercetării, nr.<br />
contract 27661 / 14.03.2005, Cod CNCSIS 90, Tema 17, act adiţional 17 C / 18.04.<strong>2006</strong>, Cod CNCSIS<br />
90, Tema 28, (valoare <strong>2006</strong>: 24.000 RON), director: D. Selişteanu. Proiectul a utilizat echipamente de<br />
calcul si software achiziţionate în cadrul platformei în anul <strong>2006</strong>.<br />
24. Sistem informatic avansat bazat pe reţele neurale pentru asistarea automata a diagnozei în<br />
oftalmologie, grant CNCSIS tip A, cod 157/<strong>2006</strong>-2007, director Daniela Danciu, valori: 70.000 RON<br />
(<strong>2006</strong>) şi 79.000 RON (2007). Proiectul a utilizat echipamente de calcul si software achiziţionate în<br />
cadrul platformei în anul <strong>2006</strong>.<br />
25. Stabilitate şi oscilaţii în dinamica sistemelor om-maşină, Contract PNCDI II, Programul: IDEI,<br />
Tipul proiectului: Proiecte de cercetare exploratorie, Cod CNCSIS ID 95, 2007-2010, Universitatea<br />
din Craiova - UEFISCSU, valoare 2007: 47.695 RON, valoare <strong>2008</strong>: 245.200 lei, director: V. Rasvan.<br />
[59, 61-69, 76, 80]<br />
26. Reglarea neliniară robustă a coloanelor de separare criogenică a izotopului 13C, Contract PNCDI<br />
II, Programul: Parteneriate, Coordonator UTCluj Napoca, director C. Feştilă, grant nr. 71-<br />
023/septembrie 2007, 2007-2010, responsabil Craiova: D. Popescu, valoare Univ. Craiova 2007:<br />
35.000 RON, valoare <strong>2008</strong>: 35.000 lei. [61, 76, 80, 105-106]<br />
27. Reţele de distribuţie de c.c. pentru aplicaţii industriale – DCNET, Contract CNCSIS A Consorţiu,<br />
nr. 194/07.06.<strong>2006</strong>, Cod CNCSIS 95, Tema 1, responsabil Craiova: E. Bobaşu, valoare Univ. Craiova<br />
<strong>2006</strong>: 44.400 RON, valoare Univ. Craiova 2007: 34.350 RON , valoare <strong>2008</strong>: 29.500 lei. Proiectul a<br />
utilizat echipamente de calcul si software achiziţionate în cadrul platformei în anul <strong>2006</strong>.<br />
28. Studii teoretice şi experimentale privind detecţia şi localizarea defectelor, Contr. nr.<br />
27GR/11.05.2007, Tema 2, Cod CNCSIS: 168/2007, G. Cănureci, valoare 2007, valoare <strong>2008</strong>: 30.000<br />
lei: 30.000 RON. [66-69, 75, 77, 78, 79]<br />
52
29. Algoritmi pentru detecţia şi localizarea defectelor în sistemele dinamice. Dezvoltarea de metode<br />
analitice pentru diagnosticarea asistată de calculator. Aplicaţii în studiul sistemelor fiziologice,<br />
contract nr. 27GR/11.05.2007, tema nr. 10, cod CNCSIS: 626, director: E. Iancu, valoare 2007: 40.000<br />
RON, valoare <strong>2008</strong>: 40.000 lei. [65, 76-79, 108-109]<br />
30. Modele şi tehnici morfometrice cu aplicaţii în ameliorarea diagnosticului imagistic în cancere<br />
digestive şi evaluarea de noi terapii – IMAGO, contract PNCDI II, Programul: 4 – Parteneriate în<br />
domeniile prioritare, Coordonator: Universitatea Politehnica Bucureşti, parteneri: Institutul Clinic<br />
Fundeni, Universitatea din Craiova, nr. înreg. CNMP 31/2007, responsabil Craiova: E. Iancu, valoare<br />
2007: 30.000 RON, valoare <strong>2008</strong>: 60.000 lei. [80, 83, 108, 109]<br />
31. Modelarea, proiectarea şi implementarea unor algoritmi evoluaţi în sistemele de conducere<br />
distribuită utilizând conceptul de structură holonică, nr. contract 27GR/2007, Tema 19, Cod CNCSIS<br />
624/2007, director M. Vînătoru, valoare 2007: 60.000 RON, valoare <strong>2008</strong>: 63.000 lei. [77-79]<br />
32. Robotica virtuală. Proiect nr. D11-068/2007, PNCDI-II, modul Parteneriate. Partenerii 4. Se<br />
utilizează in comun si echipamente achizitionate in cadrul platformei [pozitiile 29, 33, 35, 44, 45, 46,<br />
47, 48, 49, 50 din lista de achizitii].<br />
D. Accesarea fondurilor din surse centralizate, programe, prin propuneri de proiecte de<br />
cercetare:<br />
1. Enhancing Lifelong Learning for the Electrical and Information Engineering Community,<br />
Coordonator: University Claude Bernard Lyon 1, Franta, Universitatea din Craiova este Partener,<br />
director din partea Universitatii din Craiova: Conf. dr. ing. Dorin Popescu; Perioada: <strong>2008</strong>-2011<br />
(propus febr. <strong>2008</strong>); Lifelong Learning Programme; Sub-programmes – Multilateral Projects,<br />
Networks, Accompanying measures – Aprobat pentru finantare.<br />
2. Proiect în competitia Fonduri Structurale POS nr. 160-14.03.<strong>2008</strong>: Platforma de Cercetare<br />
Multidisciplinara in Domeniul Materialelor, Proceselor si Tehnologiilor Inovativem; Director: Prof.<br />
dr. Ion Vladimirescu.<br />
3. Proiect de cercetare PROGRAMUL PNCDI – II; MODUL “PARTENERIATE”: Model de<br />
formare initiala si continua a resurselor umane in vederea corelarii sistemului educational cu cerintele<br />
pietei muncii in domeniul mecatronicii si roboticii, Coordonator: Universitatea din Craiova, Director<br />
proiect: Conf. dr. ing. Dorin Popescu, Parteneri 6. Perioada: <strong>2008</strong>-2010.<br />
4. Proiect de cercetare PROGRAMUL PNCDI – II; MODUL Inovare ”Sistem robotizat pentru liniile<br />
de productie a fitingurilor din polipropilena; Coordonator: S.C. Valrom; Parteneri: Universitatea din<br />
Craiova; Director din partea Universitatii din Craiova: Conf. dr. ing. Dorin Popescu; Perioada: <strong>2008</strong>-<br />
2010;<br />
5. Programul: PNCDI- PN II - Programul IDEI; Tip proiect: Cercetare exploratorie. Depus spre<br />
evaluare în 15.02.<strong>2008</strong>: Cercetări privind sistemele robotice mobile; Director: Prof. Univ. Dr. Ing.<br />
Mircea Niţulescu; Beneficiar: CNCSIS – UEFISCU;<br />
6. Programul: Fonduri Structurale 2: Centru Zonal de Formare, Cercetare şi Dezvoltare în domeniul<br />
Mecatronicii şi Automaticii Director: Prof. Univ. Dr. Ion Vladimirescu, Rectorul Universităţii din<br />
Craiova; Beneficiar: <strong>UCV</strong>. Depus spre evaluare nr. 420 / 01.11.2007.<br />
7. Grant tip Idei – Proiecte de Cercetare Exploratorie, <strong>2008</strong>: “Dezvoltarea de modele si metode de<br />
identificare si conducere a sistemelor biotehnologice si biologice”, cod 548, director: prof. dr. ing. Dan<br />
Selisteanu – Aprobat pentru finantare.<br />
8. Proiect de accesare a fondurilor structurale, programul Impact, Centru de formare, cercetare,<br />
dezvoltare in mecatronica si automatica - director prof. dr. ing. Nicu Bizdoaca - valoare alocata<br />
7.450.000 Euro – 2007.<br />
9. Propunere grant IDEI – Proiect de cercetare exploratorie complex: Cercetari Multidisciplinare in<br />
Domeniul Biomecatronicii si Bionicii. <strong>2008</strong>. Director: Prof. dr. ing. Mircea Ivanescu; Resp st: Prof. dr.<br />
ing. Nicu Bîzdoacă;<br />
10. Proiect depus spre evaluare Idei PNCDI 2: Ingineria Inversa in Modelarea Cognitiva si Controlul<br />
Structurilor Biomimetice. <strong>2008</strong>. Director: Prof. dr. ing. Nicu Bîzdoacă – Aprobat pentru finantare.<br />
11. Centru Zonal de Formare, Cercetare şi Dezvoltare în domeniul Mecatronicii şi Automaticii;<br />
Director: Prof. Dr.ing. Nicu Bîzdoacă; Beneficiar: <strong>UCV</strong>; Programul: Impact; Depus spre evaluare nr.<br />
420 / 01.11.2007.<br />
53
12. Propunere grant IDEI – Proiect de cercetare exploratorie complex: O noua generatie de roboti<br />
cognitivi adaptivi cooperand in structuri de productie semiheterarhice, director: prof. dr. ing. Theodor<br />
Borangiu. <strong>2008</strong>. Responsabil local: prof. dr. Ing. Mircea Ivanescu.<br />
13. Programul 4 – Parteneriate in domeniile prioritare, Tipul PC: Sisteme de timp real pentru<br />
monitorizare si asistenta medicala de urgenta in ambulante, Acronim: MASMED, Nr inregistrare:<br />
4170, <strong>2008</strong>. Director proiect: Prof. dr. Ing. Theodor Borangiu.<br />
14. Programul 4 – Parteneriate in domeniile prioritare, Tipul PC: Sistem Informatic Integrat pentru<br />
Expoziţii Virtuale Destinate Prezentării Rezultatelor Activităţilor Economice si de Cerecetare-Inovare,<br />
Acronim: VIRTFAIR, Nr inregistrare: 2749, Director proiect: prof. dr. ing. Dorian Cojocaru.<br />
54
ANEXA E<br />
Lista doctoranzilor admişi în <strong>2006</strong>:<br />
1. Florescu Mihaela Cecilia (f.f) – Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Sisteme si algoritmi de conducere a robotilor industirali utilizand materiale<br />
inteligente.<br />
2. Raducu Mihai George (f.f) – Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Sisteme de conducere pentru roboti cooperativi in configuratii reconfigurabile.<br />
3. Manta Liviu Florin (b) – Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Roboti cu locomotie bazati pe miscarea pendulara.<br />
4. Greabăn Emilian (f.f) – Prof. dr. ing. Constantin Marin<br />
Tema de doctorat: Sisteme de proiectare bazate pe model cu aplicatie in industria auto.<br />
5. Anghel Gabriel (f.f) - Prof. dr. ing. Constantin Marin<br />
Tema de doctorat: Aplicatii ale programarii dinamice discrete pentru conducerea sistemelor.<br />
6. Zglimbea Radu (b) - Prof. dr. ing. Constantin Marin<br />
Tema de doctorat: Algoritmi de conducere adaptiva a sistemelor dinamice cu frecare.<br />
7. Fetoiu Titu (f.f) – Prof. dr. ing. Vînatoru Matei<br />
Tema de doctorat: Sisteme SCADA pentru statii de pompare apa si statii de epurare.<br />
8. Craciun Alexandru (f.f) - Prof. dr. ing. Vînatoru Matei.<br />
Tema de doctorat: Concepte de utilizare a structurilor holonice in sisteme de conducere distribuite.<br />
9. Popa Stefania (f.f) - Prof. dr. ing. Vînatoru Matei.<br />
Tema de doctorat: Concepte de uitilizare a retelelor neuronale in sistemele de conducere distribuite.<br />
10. Jianu Adriana (f.f) - Prof. dr. ing. Rasvan Vladimir<br />
Tema de doctorat: Baze de date si prelucrarea semnalelor.<br />
11. Olteanu Raluca (b) – Prof. dr. ing. Rasvan Vladimir<br />
Tema de doctorat: Sisteme de conducere cu DSP – aplicatii.<br />
Lista doctoranzilor admişi în 2007:<br />
1. Băscu Laurentiu (f.f) – Prof. dr. ing. Badica Costin<br />
Tema de doctorat: Managementul informatiei in sisteme de agenti.<br />
2. Dobriceanu Adraina (f.f) - Prof. dr. ing. Badica Costin<br />
Tema de doctorat: Servicii de negociere in sisteme de agenti<br />
3. Dumitru Sorin (f.f) - Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Sisteme de conducere pentru roboti tentaculari.<br />
4. Ingeana Dumitru (f.f) - Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Sisteme de conducere pentru un robot tentacular 3D utilizand vederea artificiala.<br />
5. Manescu Ion (f.f) - Prof. dr. ing. Mircea Ivanescu<br />
Tema de doctorat: Sisteme de conducere pentru formatii de roboti.<br />
6. Matusa Tudor (f.f) - Prof dr. Ing. Mocanu Mihai<br />
Tema de doctorat: Calcul paralel, modelare si viziualizare pentru procese distincte.<br />
7. Cotocea Cosmin (f.f) - Prof. dr. ing. Rasvan Vladimir<br />
Tema de doctorat: Securizarea transmisiilor de date in sistemele informatice.<br />
8. Iorga Ionel (f.f) - Prof. dr. ing. Rasvan Vladimir<br />
Tema de doctorat: Dinamici ale sistemelor om/masina<br />
9. State Claudiu (f.f) - Prof dr. Ing Rasvan V.<br />
Tema de doctorat:<br />
10. Tudor Adrian (f.f) - Prof dr. Ing Rasvan V.<br />
Tema de doctorat: Stabilitate si oscilatii in dinamica sistemelor om/masina.<br />
11. Soimu Andeea (b) - Prof. dr. ing. Rasvan Vladimir<br />
Tema de doctorat: Sisteme automate de conducere a filtrelor active in timp real in timp real<br />
12. Olteanu Dragos (b) - Prof. dr. ing. Constantin Marin<br />
Tema de doctorat: Interfete om/masina pentru conducerea automata a proceselor complexe.<br />
13. Anghelina Diana (f.f) - Prof. dr. ing. Vînatoru Matei<br />
55
Tema de doctorat: Managementul sistemelor informatice.<br />
14. Saliu Viorel (f.f) - Prof. dr. ing. Vînatoru Matei<br />
Tema de doctorat: Algoritmi de conducere distribuita a proceselor industriale complexe.<br />
Lista doctoranzilor admişi în <strong>2008</strong>:<br />
1. Stîngă Florin - Prof. dr. ing. Dan Popescu<br />
2. Marior Adrian - Prof. dr. ing. Constantin Marin<br />
3. Oprică Teodor - Prof. dr. ing. Matei Vînătoru<br />
4. Privantu Daniela - Prof. dr. ing. Mircea Ivănescu<br />
5. Barbu Mihai Bogdan - Prof. dr. ing. Dan Popescu<br />
6. Monea Bogdan Florin - Prof. dr. ing. Emil Petre<br />
7. Stănică Roxana - Prof. dr. ing. Emil Petre<br />
8. Zamfirescu Cristina - Prof. dr. ing. Matei Vînătoru<br />
9. Vijulie Mihai - Prof. dr. ing. Matei Vînătoru<br />
10. Suto Arpad Istvan - Prof. dr. ing. Matei Vînătoru<br />
11. Bejenaru Laviniu - Prof. dr. ing. Vladimir Răsvan<br />
12. Şolea Radu - Prof. dr. ing. Vladimir Răsvan<br />
13. Khusyairi Akhmad - Prof. dr. ing. Dorian Cojocaru<br />
14. Surlea Dragoş - Prof. dr. ing. Emil Petre<br />
Teze de doctorat susţinute:<br />
- Dorin Sendrescu, martie 2007, Algoritmi de identificare folosind metoda momentelor ponderate,<br />
conducator prof. dr. ing. V. Rasvan.<br />
- Gabriel Stoian, ianuarie <strong>2008</strong>, Model pentru analiza cantitativa si calitativa a transmisiilor de date<br />
ADSL, conducator prof. dr. ing. V. Rasvan.<br />
- Daniela Pana, ianuarie 2007, Algoritmi de conducere fuzzy pentru roboti hiperredundanti,<br />
conducator prof. dr. ing. Mircea Ivanescu.<br />
- Elvira Popescu, noiembrie <strong>2008</strong>, Hipermedia dinamice adaptive pentru e-learning, conducător prof.<br />
dr. ing. Vladimir Răsvan<br />
- Cristina Pană, Algoritmi de conducere a roboţilor păşitori în regim de defect, conducator prof. dr.<br />
ing. Mircea Ivanescu.<br />
- Razvan Tudor Tanasie, Tehnici software avansate pentru conducerea prin vedere artificiala a<br />
robotilor, conducator Prof. dr. ing. Mircea Ivanescu<br />
- Daniela Coman, Algoritmi fuzzy pentru conducerea robotilor din jocurile de tip fotbal, conducator<br />
Prof. dr. ing. Mircea Ivanescu<br />
56
ANEXA F<br />
Lucrari in reviste cotate ISI<br />
1. <strong>2006</strong> Rasvan Vladimir On stability zones for discrete time<br />
Hamiltonian systems<br />
2. 2007 Petre Emil, Selişteanu Dan Approximation of the Dynamical<br />
Model for a Class of Nonlinear<br />
Propagation Bioprocesses<br />
3. 2007 Selişteanu Dan, Petre Emil,<br />
Răsvan Vladimir<br />
4. 2007 Cela Arben,<br />
Ben Gaid El Mongi,<br />
Ionete Cosmin<br />
Sliding Mode and Adaptive Sliding<br />
Mode Control of a Class of<br />
Nonlinear Bioprocesses<br />
Discussion on: Stabilization of<br />
Networked Control System with<br />
Time Delays and Data Packet<br />
Losses<br />
Adv. Difference Equations vol.3, pp.1-14 ISSN: 1687-1839<br />
Rev. Roum. Sci. Techn.- Électrotechn. et Énerg.,<br />
Bucarest, Romania, vol. 52, no. 3, Juillet-<br />
Septembre, 2007, pp. 371-381<br />
International Journal of Adaptive Control and<br />
Signal Processing, Vol. 21, no. 8-9, October-<br />
November, 2007, pp. 795-822<br />
European Journal of Control, Vol. 13, No. 4, pp.<br />
351-353<br />
5. 2007 Rasvan Vladimir A new dissipativity criterion International Journal of Robust and Nonlinear<br />
Control, vol.17, pp. 483-495<br />
6. <strong>2008</strong> Petre Emil,<br />
Adaptive control strategies for a Acta Montanistica Slovaca, vol. 13, no. 1, pp. 118-<br />
Popescu Dan,<br />
class of nonlinear propagation 126<br />
Selisteanu Dan<br />
bioprocesses<br />
7. <strong>2008</strong> Barbu Cristina, Constantinescu<br />
Mădălina, Popescu Alexandru,<br />
Selişteanu Dan, Preda Anişoara<br />
8. <strong>2008</strong> Barbu Cristina, Popescu<br />
Alexandru, Selişteanu Dan,<br />
Preda Anişoara<br />
9. <strong>2008</strong> Stoian Viorel,<br />
Nitulescu Mircea,<br />
Pana Cristina<br />
Study of the Concentrations of the<br />
Heavy Metals from the Jiu River, in<br />
Post Communist Romania<br />
Determination of the Concentration<br />
of Some Toxic Heavy Metals on the<br />
Jiu River Course using ICP-MS<br />
Hexapod Leg Control Algorithm in<br />
Fault Conditions<br />
10. <strong>2008</strong> Niţulescu M., Stoian V. Modelling and control aspects for a<br />
type of mobile robot<br />
Journal of Environmental Protection and Ecology,<br />
Book 3, Vol. 9, pp. 522-530<br />
Asian Journal of Chemistry, Vol. 20, No. 3, pp.<br />
2037-2046<br />
ISSN 0035-4066<br />
ISSN 0890-6327<br />
ISSN 0947-3580<br />
ISSN 1049-8923<br />
ISSN 1335-1788<br />
ISSN: 1311-5065<br />
ISSN: 0970-7077<br />
Journal "Mechanika", No3 (71), <strong>2008</strong>, pp.57-61 ISSN: 1392-1207<br />
Revista “Mechanika’, Section: Mechaninių<br />
Sistemų Projektavimas Ir Optimizavimas, Vol. 1<br />
(69), <strong>2008</strong>, pp. 54 – 58, Kaunas University of<br />
Technology, Lithuania<br />
ISSN: 1392 – 1207<br />
57
11. <strong>2008</strong> Bîzdoacă, N., Tarnita, D., Tarnita,<br />
D. N.<br />
Modular adaptive implant based on<br />
smart materials<br />
Romanian Journal of Morphology and<br />
embryology, Vol. 48. No.2, Ed. Academiei<br />
Romane.<br />
ISSN 1220-0522<br />
Citari in reviste ISI<br />
1. <strong>2006</strong> Vl. Rasvan Dynamical Systems with Several Equilibria<br />
and Natural Liapunov Functions.<br />
2. <strong>2006</strong> A. Halanay,Vl. Rasvan Abs. Stab Feedback Syst., Int.J.System<br />
Sci. v.22,10,1911-1927, 1991<br />
3. <strong>2006</strong> A. Halanay,Vl. Rasvan Stab. radii for propag. models, IMA J. Math.<br />
Contr. Inf. v.14,1,95-107,1997<br />
4. <strong>2006</strong> A. Halanay,Vl. Rasvan Stab. radii for propag. models, IMA J. Math.<br />
Contr. Inf.v.14,1,95-107,1997<br />
5. <strong>2006</strong> A. Halanay, Vl. Rasvan Frequ. dom. cond. forced oscil. in differ.<br />
systems, Rev. Roum. Sci. Techn. Electrot.<br />
Energ. v. 24, 1, 141-48,1979<br />
6. <strong>2006</strong> A. Halanay, Vl. Rasvan Frequ. dom. cond. forced oscil. in differ.<br />
systems, Rev. Roum. Sci. Techn. Electrot.<br />
Energ. v. 24, 1, 141-48, 1979<br />
7. <strong>2006</strong> Vl. Rasvan Delay independent and delay dependent<br />
Aizerman problem<br />
8. <strong>2006</strong> Vl. Rasvan Delay independent and delay dependent<br />
Aizerman problem<br />
9. 2007 Vl. Rasvan Dynamical Systems with Several Equilibria<br />
10. 2007 Vl. Rasvan, S. Niculescu,<br />
D. Selisteanu<br />
and Natural Liapunov Functions.<br />
Lossless propagation models describing<br />
the transients of combined heat/electricity<br />
generation<br />
11. 2007 A. Halanay, Vl. Rasvan Frequ. dom. cond. forced oscil. in differ.<br />
systems, Rev. Roum. Sci. Techn. Electrot.<br />
Energ. v. 24,1, 141-48, 1979<br />
12. 2007 Vl. Rasvan Dynamical Systems with Several Equilibria<br />
and Natural Liapunov Functions.<br />
Journal of Dynamical and Control Systems, ISSN: 1079-2724<br />
<strong>2006</strong> - Springer<br />
Automation and Remote Control ISSN: 0005-1179<br />
IEEE Transactions on Automatic Control ISSN: 0018-9286<br />
Control Theory and Applications ISSN: 1350-2379<br />
Advances in Difference Equations ISSN: 1687-1847<br />
Asymptotic Analysis ISSN: 0921-7134<br />
Automatica ISSN: 0005-1098<br />
Automatica(Oxford) ISSN: 0005-1098<br />
Journal of Optimization Theory and Applications, ISSN: 0022-3239<br />
2007 - Springer<br />
Nonlinearity ISSN: 0951-7715<br />
Journal of Mathematical Analysis and<br />
Applications<br />
LECTURE NOTES IN COMPUTER SCIENCE,<br />
2007 - Springer<br />
ISSN: 0022-247X<br />
ISSN: 0302-9743<br />
58
13. 2007 A. Halanay, Vl.Rasvan Frequ. dom. cond. forced oscil. in differ.<br />
systems, Rev. Roum. Sci. Techn. Electrot.<br />
Energ. v. 24,1,141-48,1979<br />
14. 2007 A. Halanay, Vl.Rasvan Stability and Stable Oscillations in Discrete<br />
Time Systems<br />
15. 2007 A. Halanay, Vl.Rasvan Abs. Stab Feedback Syst., Int. J. System<br />
Sci. v.22,10,1911-1927, 1991<br />
16. <strong>2008</strong> Vl.Rasvan Absolute stability of feedback systems with<br />
several differentiable nonlinearities” din<br />
Int. J. Syst. Sci 1991 oct.<br />
17. <strong>2008</strong> A. Halanay, Vl.Rasvan Stability and Stable Oscillations in Discrete<br />
Time Systems, Gordon & Brench, 2000<br />
18. <strong>2008</strong> D. Popescu, Vl Răsvan, R.<br />
Ştefan<br />
Applications of stability critera to time delay<br />
systems, Electr. Journal on Qualitative<br />
Theory of Differential Equations 2004 Nr.<br />
18, pp 1-20.<br />
19. <strong>2008</strong> A. Halanay, Vl.Rasvan Frequency domain conditions for forced<br />
oscillations in difference systems, Rev.<br />
Roumaine Sci. Techn. Ser. Electrothn. et<br />
Energ 1997 Nr. 1.<br />
20. <strong>2008</strong> D. Danciu Vl. Răsvan Stability results for cellular neural networks<br />
with time delay, LNCS 2005 pp. 366-373.<br />
21. <strong>2008</strong> D. Popescu, Vl Răsvan Robustness properties of a control<br />
procedure for systems with input delay<br />
Proc. MELECON 2004, pp. 391-394.<br />
22. <strong>2008</strong> Vl. Răsvan, S. Niculescu Oscillations in lossless propagation<br />
models: a Liapunov Krasocskii approach ,<br />
IMA Journal of Mathematical Control and<br />
Information 2002 pp. 157-172<br />
Nonlinear Analysis, Theory Methods and<br />
Applications<br />
ISSN: 0362-546X<br />
Journal of Computational Appl. Mathematics ISSN: 0377-0427<br />
International Journal of Robust and Nonlinear<br />
Control<br />
Y. Yu, F. Zhung, Q. Zhung, X. Liuv, J. Yu<br />
Impulsive control of Lurie Systemes, Computers<br />
and Mathem. with Applications <strong>2008</strong><br />
Y. Song, Asymptotically almost periodic<br />
solutions of nonlinear volterra difference<br />
equations with unbounded delay, Journal of<br />
Difference Equations and Applications <strong>2008</strong>, vol.<br />
1n Nr. 9 pp 971-986<br />
E. Zeheb, Y. Dolgin, Design for positivity of<br />
analytic functions, IMA Journal of Math. Control<br />
and Inform. Vol 25 (<strong>2008</strong>) pp. 409- 17<br />
R. Luca Nonlinear differential problems with first<br />
or second order difference eqs in Hilbert Space,<br />
Nonlinear Analysis <strong>2008</strong><br />
L. Zhong, L. Si, Existence and global<br />
alternativity of almost periodic solutions for<br />
DCNN with time varying coefficients, Computers<br />
and Mathem. with Applications 55 (8), pp. 1887-<br />
1894.<br />
M. Haraguchi, M. Y. Hu Using a new<br />
discretization approach to design a delayed<br />
LQG<br />
controller, Journ. Sound and Vibration 314 Nr. 3-<br />
5, pp. 558-570<br />
P. Pepe et al, On the Liapunov Krasovski<br />
methodology for the ISS of systems describe by<br />
coopled delay differential and difference<br />
equations AUTOMATICA 44, Nr. 9, pp. 2266-73.<br />
ISSN: 1049-8923<br />
ISSN: 0898-1221<br />
ISSN: 1023-6198<br />
ISSN: 0265-0754<br />
ISSN: 0362-546X<br />
ISSN: 0898-1221<br />
ISSN: 1541-0161<br />
ISSN: 0005-1098<br />
59
Lucrari publicate in reviste<br />
1. <strong>2006</strong> Ivănescu Mircea, Cojocaru<br />
Dorian, Popescu N, Popescu D,<br />
Tanasie R.<br />
Visual Based Control<br />
System for a Tentacle<br />
Manipulator<br />
2. <strong>2006</strong> Cojocaru Dorian, Tanasie R. A Software System for<br />
Virtual Servoing<br />
3. <strong>2006</strong> Ivănescu Mircea, Cojocaru<br />
Dorian, Popescu N, Popescu D,<br />
Tanasie R.<br />
4. <strong>2006</strong> Cojocaru Dorian Morăreţ Adrian,<br />
Manta Florin.<br />
Hyperredundant Robot<br />
Control by Visual Servoing<br />
Fuzzy Techniques for<br />
Human Face Detection and<br />
Recognition<br />
5. <strong>2006</strong> Niculescu, M. C. Optimization of the<br />
Wireless Communications<br />
in VPNs Using Mobile IP<br />
6. <strong>2006</strong> Popescu Dorin Advanced Applications for a<br />
Mechatronic Station<br />
7. <strong>2006</strong> Nitulescu Mircea Mobile Robots Obstacle<br />
Avoidance Using Fuzzy<br />
Logic Control<br />
8. <strong>2006</strong> Nitulescu Mircea Design Particularities and<br />
Experiments with the<br />
Didactical Mobile Robot<br />
Line Tracker<br />
9. <strong>2006</strong> Nitulescu Mircea Some Aspects in Two-<br />
Wheel Differential Drive<br />
Mobile Robot Modeling and<br />
Control<br />
WSEAS Transactions on Information<br />
Science and Applications, Issue 3, vol.<br />
3, p. 610-617<br />
WSEAS Transactions on Information<br />
Science and Applications, Issue 3, vol.<br />
3, p. 2086-2093<br />
Studies in Informatics and Control<br />
Journal, Volume 15, Number 1, P93-<br />
102<br />
Buletinul Institutului Politehnic din Iaşi,<br />
Tomul LII (LVI), Fascicula 7A, Secţia<br />
Construcţii de Maşini, p169-174<br />
WSEAS Transactions on<br />
Communications, ISSUE 12, Vol. 5,<br />
December <strong>2006</strong>, pp. 2161 – 2166<br />
WSEAS Transaction on Advances in<br />
Engineering Education, ISSUE 7, vol.<br />
3, pp. 680-687,<br />
Revista “ACTA TECHNICA<br />
NAPOCENSIS”, Series: Applied<br />
Mathematics and Mechanics, Vol. III,<br />
Nr. 49, pp.99-104<br />
Revista “ACTA TECHNICA<br />
NAPOCENSIS”, Series: Applied<br />
Mathematics and Mechanics, Vol. III,<br />
Nr. 49, pp.115-120<br />
Revista ”Buletinul Institutului Politehnic<br />
din Iaşi”, Editat de Universitatea<br />
Tehnică "Gh. Asachi" din Iaşi, Tomul<br />
LII (LVI), Fascicula 7B, Secţia<br />
Construcţii de maşini, pp. 97-102<br />
ISSN 1790-0832<br />
ISSN 1790-0832<br />
ISSN 1220-1766<br />
[INSPEC, DOAJ,<br />
IS, IET]<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC,<br />
Zentralblatt]<br />
ISSN 1011-2855 Cod CNCSIS 500<br />
B<br />
ISSN 1109-2742<br />
ISSN 1790-1979<br />
[INSPEC]<br />
[INSPEC]<br />
ISSN 1221-5872. Cod CNCSIS 118,<br />
Categoria B<br />
ISSN 1221-5872. Cod CNCSIS 118,<br />
Categoria B<br />
ISSN: 1011-2855. Cod CNCSIS 500,<br />
Categoria B<br />
60
10. <strong>2006</strong> N. Nedela, M. Niţulescu Mobile Robots Obstacle<br />
Avoidance Using Fuzzy<br />
Logic Control<br />
Revista “ACTA TECHNICA<br />
NAPOCENSIS”, Series: Applied<br />
Mathematics and Mechanics, Vol. III,<br />
Nr. 49, pp.99-104<br />
ISSN 1221-5872. Cod CNCSIS 118,<br />
Categoria B<br />
11. <strong>2006</strong> Vl. Rasvan Four Lectures on Stability II Contr. Eng. Appl. Inform.vol.8, 1, 44-50 ISSN 1454-8658 Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
12. <strong>2006</strong> Vl. Rasvan Four Lectures on Stability<br />
III<br />
13. <strong>2006</strong> Vl. Rasvan Four Lectures on Stability<br />
IV<br />
14. <strong>2006</strong> S.I.Niculescu, Vl. Rasvan Stability results for a class<br />
of neutr. funct. diff. eqs.<br />
15. <strong>2006</strong> Bobasu Eugen, Popescu Dan On Modelling and<br />
Multivariable Adaptive<br />
Control of Robotic<br />
Manipulators<br />
16. <strong>2006</strong> Bobasu Eugen, Popescu Dan,<br />
Roman Monica<br />
On Nonlinear Control of the<br />
Hydraulic<br />
Servomechanisms<br />
Contr. Eng. Appl. Inform.vol.8, 2, 52-57 ISSN 1454-8658 Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
Contr. Eng. Appl. Inform.vol.8, 3, 52-57 ISSN 1454-8658 Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
Rev. Roumaine Math.Pures Appl. v. 51,<br />
2, pp. 239-256<br />
WSEAS Transactions on Systems,<br />
Issue 7, vol. 5, July <strong>2006</strong>, pp. 1579-<br />
1586, ISSN: 1109-2777<br />
Transactions of the VSB – Technical<br />
University of Ostrava, Mechanical<br />
Series, no. 2 (LII), pp. 19-24, ISSN:<br />
1210-0471 (ISBN: 80-248-1211-8).<br />
ISSN 0035-3965<br />
ISSN 1109-2777<br />
ISSN 1210-0471<br />
Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC,<br />
Zentralblatt]<br />
17. <strong>2006</strong> Petre Emil, Selisteanu Dan ,<br />
Sendrescu Dorin<br />
Nonlinear and Neural<br />
Networks Based Adaptive<br />
Control for a Class of<br />
Dynamical Nonlinear<br />
Processes<br />
WSEAS Transactions on Systems,<br />
Issue 7, Vol. 5, July <strong>2006</strong>, pp. 1517-<br />
1524, ISSN 1109-2777.<br />
ISSN 1109-2777<br />
[INSPEC,<br />
Zentralblatt]<br />
18. <strong>2006</strong> Selisteanu Dan , Petre Emil,<br />
Handam H. Popescu Dorin<br />
Modelling and Vibrational<br />
Control of a Continuous<br />
Stirred Tank Bioreactor with<br />
Delay in the Recycle<br />
Stream<br />
WSEAS Transactions on Biology and<br />
Biomedicine, Issue 5, Vol. 3, May <strong>2006</strong>,<br />
pp. 331-338, ISSN 1109-9518.<br />
ISSN 1109-9518<br />
[INSPEC,<br />
Zentralblatt]<br />
61
19. <strong>2006</strong> Popescu Dan, Petre Emil,<br />
Bobasu Eugen<br />
On the Stability<br />
Robustification of the Exact<br />
Linearization Method<br />
20. <strong>2006</strong> Popescu Dan, Bobasu Eugen Robust Control Design for<br />
an Electrohydraulic System<br />
using Reduced Order<br />
Models<br />
Transactions of the VSB - Technical<br />
University of Ostrava. Mechanical<br />
Series no. 2 (LII), pp. 125-130, ISSN:<br />
1210-0471<br />
WSEAS Transactions on Systems,<br />
Issue 7, vol. 5, pp. 1525-1531, ISSN:<br />
1109-2777<br />
ISSN 1210-0471<br />
ISSN 1109-2777<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC,<br />
Zentralblatt]<br />
21. <strong>2006</strong> Popescu Dan, Bobasu Eugen,<br />
Petre Emil, Iacob Ana, Duta M.,<br />
Popescu S., Olariu G.,<br />
Hurezeanu G.<br />
Harmonics Filtering-<br />
Compensation Equipment<br />
for the Oil Drilling Stations<br />
Buletinul Institutului Politehnic din Iasi,<br />
sectia: Electrotehnica, Energetica,<br />
Electronica, Tomul LII(LVI), Pp. 870-<br />
875, ISSN: 1223-8139<br />
ISSN 1223-8139<br />
Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
22. <strong>2006</strong> C. Marin, A. Petrişor, V. Fincă On the Generalised Friction<br />
Dynamic Systems<br />
Identification by<br />
Distributions<br />
23. <strong>2006</strong> A. Petrişor, C. MarinV.,N.<br />
Bizdoaca, D. Cazacu<br />
Variable Causality<br />
Dynamics System<br />
Approach for Robot Control<br />
24. 2007 Danciu Daniela, Rasvan Vladimir Dynamic of Neural<br />
Networks-some qualitative<br />
properties<br />
Transactions on AUTOMATIC<br />
CONTROL and COMPUTER<br />
SCIENCE, Vol. 51 (65), <strong>2006</strong>, ISSN<br />
1224-600X,SCIENTIFIC BULLETIN of<br />
“Politehnica” University of Timisoara,<br />
ROMANIA<br />
WSEAS TRANSACTIONS on<br />
SYSTEMS and CONTROL ,ISSN<br />
1991-8763, ISSUE 1, VOLUME 1,<br />
NOVEMBER <strong>2006</strong>,pp 26-30<br />
Computational and Ambient Intlligente,<br />
Lecture Notes in Comp. Sci. 4507<br />
ISSN 1224-600X<br />
ISSN 1991-8763<br />
ISSN 0302-9743<br />
Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
[INSPEC,<br />
Zentralblatt]<br />
[SpringerLink]<br />
25. 2007 Petre Emil, Selisteanu Dan Some aspects concerning<br />
the modelling of chlorine<br />
residuals in drinking water<br />
distribution networks<br />
26. 2007 Vl. Rasvan Lost cases in the theory of<br />
stability for linear time delay<br />
systems<br />
27. <strong>2008</strong> Marin Constantin, Selisteanu<br />
Dan, Sendrescu Dorin,<br />
Fincă Virginia, Mancas Dan<br />
Identification of Continuous<br />
Time Systems with Direct<br />
and Feedback<br />
Nonlinearities<br />
CEAI – Control Engineering and<br />
Applied Informatics, Vol. 9, no. 2, ISSN<br />
1454-8658, in printing<br />
Math. Repts. vol. 9(59), No. 1, pp. 99-<br />
110<br />
International Journal of Mathematical<br />
Models and Methods in Applied<br />
Sciences, August <strong>2008</strong>, pp. 332-341<br />
ISSN 1454-8658<br />
ISSN 1582-3067<br />
ISSN 1998-0140<br />
Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
Revista nationala<br />
cotata CNCSIS,<br />
categoria B<br />
[INSPEC]<br />
62
28. <strong>2008</strong> Marin Constantin, Selisteanu<br />
Dan, Sendrescu Dorin,<br />
Fincă Virginia<br />
29. <strong>2008</strong> Zglimbea Radu, Finca Virginia,<br />
Marin Constantin<br />
30. <strong>2008</strong> Iancu Eugen<br />
Iancu Ionela<br />
Mota Maria<br />
31. <strong>2008</strong> Maican Camelia,<br />
Vînătoru Matei,<br />
Cănureci Gabriela,<br />
Iancu Eugen<br />
Identification of Wastewater<br />
Biodegradation Processes<br />
with Time Variable<br />
Parameters<br />
Identification of Systems<br />
with Friction via<br />
Distributions using<br />
simplified Dahl model<br />
Blood Glucose Data<br />
Processing<br />
for Automated Diagnosis<br />
Control System Simulator<br />
for Steam Boiler<br />
Parameters<br />
32. <strong>2008</strong> Răsvan Vladimir About stability on bounded<br />
domains of the state space<br />
(Proc. 8th Coll. Qualitative<br />
Theory of Differential<br />
Equations QTDE)<br />
33. <strong>2008</strong> Vinatoru Matei Optimal Control of Pumped-<br />
Storage Hydro Power<br />
Plants.<br />
34. <strong>2008</strong> Canureci Gabriela, Vinatoru<br />
Matei, Maican Camelia,<br />
Iancu Eugen<br />
35. <strong>2008</strong> Ivănescu, M., Cojocaru, D.,<br />
Popescu, N., Popescu, D.,<br />
Tănasie, R.T.<br />
36. <strong>2008</strong> Cojocaru, D., Tanasie, T.R.,<br />
Ivanescu, M.<br />
37. <strong>2008</strong> Cojocaru, D., Manta, F., Tanasie,<br />
T.R., Pana, C.<br />
Additive Faults Detection<br />
and Level Control in<br />
Coupled Tanks<br />
Hyperredundant Robot<br />
Control by Visual Servoing<br />
Graphic Simulator for the<br />
Visual Control of<br />
Hyperredundant Robots<br />
3D Vision for Continuum<br />
Robot Control<br />
WSEAS Transactions on Systems and<br />
Control, <strong>2008</strong>, under press<br />
International Journal of Mathematical<br />
Models and Methods in Applied<br />
Sciences, August <strong>2008</strong>, pp. 269-276,<br />
WSEAS Transactions on Biology and<br />
Biomedicine,<br />
Issue 4, Vol. 5, pp. 75-84<br />
WSEAS Transactions on Systems and<br />
Control, Issue11, Volume3, November<br />
<strong>2008</strong><br />
Electronic Journ. on Qualitative Theory<br />
of Differential Equations, No. 16 file<br />
http://www.math.uszeged.hu/ejqtde/8/index.html<br />
ACAM - Automat. Comput. Appl. Math.<br />
Vol. 17 (<strong>2008</strong>), No. 4<br />
Publisher: Mediamira.<br />
WSEAS Transactions on Systems and<br />
Control, Issue 11, Vol. 3, Nov. <strong>2008</strong><br />
Studies in Informatics and Control<br />
Journal, Volume 15, Number 1, p93-<br />
102<br />
WSEAS Transactions on Systems and<br />
Control, Issue 9, Volume 3, p759-768,<br />
September <strong>2008</strong><br />
Bulletin of the Transilvania University of<br />
Brasov, Vol. 15(50) Series A, ISSN<br />
1223-9631, Special Issue No. 1 Vol. I,<br />
<strong>2008</strong>, p331-336<br />
ISSN 1991-8763<br />
ISSN 1998-0140<br />
ISSN 1109-9518<br />
ISSN 1991-8763<br />
ISSN 1221-437X<br />
ISSN 1991-8763<br />
ISSN 1220-1766.<br />
ISSN 1991-8763<br />
[INSPEC]<br />
[INSPEC]<br />
[INSPEC]<br />
[INSPEC]<br />
[MathSciNet,<br />
Zentralblatt<br />
MATH]<br />
[INSPEC]<br />
[INSPEC]<br />
[INSPEC, DOAJ,<br />
IS, IET]<br />
[INSPEC,<br />
Zentralblatt]<br />
ISSN 1223-9631 [Cod CNCSIS 515<br />
B].<br />
63
38. <strong>2008</strong> Niţulescu M. Solutions for modeling and<br />
control in mobile robotics<br />
39. <strong>2008</strong> Niţulescu M. Wheeled mobile robot<br />
modeling and control<br />
40. <strong>2008</strong> Niţulescu M. Modeling in wheeled mobile<br />
robotics<br />
41. <strong>2008</strong> Popescu Dorin, Corina Ilie,<br />
Andreea Calota<br />
42. <strong>2008</strong> Pană Cristina Floriana, Resceanu<br />
I., Niculescu M., Pătraşcu D.<br />
Analysis of the human body<br />
motion images<br />
Locomotion of LEGGED<br />
robot with locked joint<br />
“Control Engineering and Applied<br />
Informatics Journal –CEAI”, Editor:<br />
Romanian Society of Control<br />
Engineerig and Technical Informatics,<br />
national member organization of IFAC,<br />
Vol. 9, No. 3-4, pag. 43 – 50, 2007.<br />
Revista ”Buletinul Institutului Politehnic<br />
din Iaşi”, Editat de Universitatea<br />
Tehnică "Gh. Asachi" din Iaşi, Tomul<br />
54 (58), Fascicula 3, Secţia Construcţii<br />
de maşini, pp. 139-146, Iaşi<br />
Bulletin of the Transilvania University of<br />
Brasov, Editor: Transilvania University<br />
Press, Brasov, Romania Vol. 15(50)<br />
Series A, pp. 225-230,<br />
BULETINUL INSTITUTULUI<br />
POLITEHNIC IAŞI, TOMUL LIV (LVIII),<br />
FASC. 5, <strong>2008</strong>, ELECTROTEHNICĂ,<br />
ENERGETICĂ, ELECTRONICĂ<br />
WSEAS Transactions on Systems and<br />
Control,<br />
ISSN: 1454-8658.<br />
ISSN: 1011-2855<br />
ISSN 1223-9631<br />
ISSN: 1991-8763<br />
[Cod CNCSIS<br />
302, Categorie<br />
B+]<br />
[Cod CNCSIS<br />
500, Categoria B]<br />
[Cod CNCSIS<br />
515, Categoria B]<br />
[Cod CNCSIS<br />
500, Categoria B]<br />
[INSPEC,<br />
Zentralblatt]<br />
43. <strong>2008</strong> Ionut Resceanu, Marius<br />
Niculescu<br />
44. <strong>2008</strong> Stoian Viorel,<br />
Nitulescu Mircea,<br />
Pana Cristina.<br />
45. <strong>2008</strong> Bîzdoacă Nicu George, Dan<br />
Tarnita, Daniela Tarnita, Petrişor<br />
Anca, Bîzdoacă Elvira<br />
46. <strong>2008</strong> Petrişor Anca, Bîzdoacă Nicu<br />
George, Drighiciu Adrian,<br />
Degeratu Sonia, Petrisor Raducu<br />
47. <strong>2008</strong> Bîzdoacă Nicu George, Anca<br />
Petrişor, Elvira Bîzdoacă<br />
Real Time Monitoring in<br />
Web Telerobotic<br />
Intelligent Live Environment<br />
Design with Assistive<br />
Robots for Vulnerable<br />
Persons<br />
Modular Adaptive Bionics<br />
Structure<br />
Implementation of the<br />
Stable States Transition<br />
Control Algorithm for a four<br />
free joints Walking Robot<br />
Conventional Control and<br />
Fuzzy Control Algorithms<br />
for Memory Alloy based<br />
WSEAS TRANSACTIONS on<br />
SYSTEMS AND CONTROL, Volume 3,<br />
Solid State Phenomena Journal, Vols.<br />
147-149 (2009), pp.86-94<br />
WSEAS Transactions on Biology and<br />
Biomedicine Journal, <strong>2008</strong> (ID.31-464)<br />
WSEAS Transactions on Systems and<br />
Control Journal, august, <strong>2008</strong> (ID 31-<br />
398).<br />
WSEAS TRANSACTIONS on<br />
SYSTEMS and CONTROL, ISSN:<br />
1991-8763,Issue 2, Volume 3,<br />
ISSN: 1991-8763<br />
ISSN: 1012-0394<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC]<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC,<br />
Zentralblatt]<br />
[INSPEC,<br />
Zentralblatt]<br />
64
Tendons Robotic Structure February <strong>2008</strong>, pag 115 – 124<br />
48. <strong>2008</strong> Bîzdoacă Nicu George, Dan<br />
Tarnita, Daniela Tarnita, D. Popa,<br />
Bîzdoacă Elvira<br />
Shape memory alloy based<br />
Modular Adaptive<br />
Orthopedic Implants<br />
Aspect of Biomedical Electronics and<br />
Biomedical Informatics, pag. 188-<br />
196,ISSN:1790-5125, ISBN:978-960-<br />
6766-93-0<br />
49. <strong>2008</strong> Ionut Resceanu, Marius<br />
Niculescu, Nicu George<br />
Bizdoaca, Cristina Pana<br />
Remote Monitoring and<br />
Diagnosis of a Mechatronic<br />
System<br />
New Aspects of Applied Informatics<br />
and Communications, part 2,<br />
ISBN:978-960-6766-94-7, ISSN: 1790-<br />
5109<br />
[INSPEC,<br />
Zentralblatt]<br />
50. <strong>2008</strong> Cristina Floriana Pana, Nicu<br />
George Bizdoaca, Ionut Ristian<br />
Rescanu, Marius Niculescu<br />
Strategy Planning For<br />
Mirosot Soccer’s Robot<br />
8th WSEAS International Conference<br />
On APPLIED INFORMATICS AND<br />
COMMUNICATIONS (AIC’08), Rhodes,<br />
Greece, August 20-22, <strong>2008</strong>, Pag.411-<br />
417<br />
ISSN: 1790-5109<br />
[INSPEC,<br />
Zentralblatt]<br />
Articole la manifestari stiintifice cu colective de program<br />
1. <strong>2006</strong> Ivănescu Mircea, s.a. Visual Servoing System for a<br />
Hyperredundant Robot<br />
2. <strong>2006</strong> Ivănescu Mircea, s.a. 3d Visual Servoing for a Tentacle<br />
Manipulator<br />
The 5th WSEAS International Conference on Signal Processing,<br />
Robotics and Automation (ISPRA '06), Isbn 960-8457-41-6, P113-118,<br />
15-17 February, Madrid, Spain [Isi Proc., Inspec], <strong>2006</strong><br />
The 6th Asian Control Conference (ASCC <strong>2006</strong>), ISBN 979-15017-0,<br />
P886-893, 18-21 July, Bali, Indonesia [Isi Proc., Inspec], <strong>2006</strong><br />
3. <strong>2006</strong> Cojocaru Dorian, Tanasie<br />
Razvan Tudor<br />
4. <strong>2006</strong> Cojocaru Dorian, Tanasie<br />
Razvan Tudor<br />
Computer Graphics and Image<br />
Processing Tools for Visual Servoing<br />
Fuzzy Based Image Processing for<br />
Robotic Vision<br />
The 6th WSEAS International Conference on Signal Processing,<br />
Computational Geometry & Artificial Vision (ISCAGV'06), ISBN 960-<br />
8457-51-3, P211-216, 21-23 August, Elounda, Greece [Isi Proc.,<br />
Inspec], <strong>2006</strong>.<br />
Proceedings of Thirtheenth International Congress on Sound and<br />
Vibration (ICSV 13), ISBN 3-9501554-5-7, Paper 425, Structured<br />
Session SS08 Dynamic of Robotic Systems and Application, July 2-6,<br />
Vienna, Austria [Dopp], <strong>2006</strong>.<br />
65
5. <strong>2006</strong> Stoian Viorel Applications of the Hyper-Redundant<br />
Robotic Structures to Hands of the<br />
People with Great Disabilities<br />
6. <strong>2006</strong> Stoian Viorel Using Artificial Potential Field Methods<br />
and Fuzzy Logic for Mobile Robot<br />
Control<br />
7. <strong>2006</strong> Bîzdoacă Nicu George Hyperredundant Shape Memory Alloy<br />
Tendons Actuated Robotic System<br />
8. <strong>2006</strong> Bîzdoacă Nicu George Fuzzy Logic Controller for<br />
Hyperredundant Shape Memory Alloy<br />
Tendons Actuated Robot<br />
9. <strong>2006</strong> Bîzdoacă Nicu George Shape Memory Alloy Spring Based<br />
Hopping Robot<br />
10. <strong>2006</strong> Bîzdoacă Nicu George Mathematical Model and Conventional<br />
Control for a Shape Memory Alloy<br />
Tendon Actuated Tentacle Robot<br />
11. <strong>2006</strong> Bîzdoacă Nicu George Control of Shape Memory Alloy<br />
Tentacle Robotic Structure Using<br />
Sliding Mode Family Controllers - A<br />
Fuzzy Approach – Paper IS1-03<br />
12. <strong>2006</strong> Bîzdoacă Nicu George Fuzzy Logic Controller for a Shape<br />
Memory Alloy Tentacle Robotic<br />
Structure<br />
13. <strong>2006</strong> Bîzdoacă Nicu George Shape Memory Alloy Programmable<br />
Force Medical Staple<br />
14. <strong>2006</strong> Marius Cristian Niculescu, Drive Wireless the Mobile Robots in<br />
Dangerous Environment Using Basic<br />
Stamp II-To-Labview Interface<br />
15. <strong>2006</strong> Marius Cristian Niculescu Model of Mobile Robot Motion in<br />
The 4th International Industrial Simulation Conference <strong>2006</strong> (ISC<br />
<strong>2006</strong>), University of Palermo, Italy, June 05-07, <strong>2006</strong>.<br />
The 12th International Power Electronics and Motion Control<br />
Conference (EPE-PEMC <strong>2006</strong>), Portoroz, Slovenia, August 30-<br />
September 1, <strong>2006</strong>.<br />
7th International Carpathian Control Conference – ICCC <strong>2006</strong>,<br />
Ostrava, Beskydy, Cyech Republic, 29-31 May, <strong>2006</strong>, ISBN 80-248-<br />
1066-2<br />
7th International Carpathian Control Conference – ICCC <strong>2006</strong>,<br />
Ostrava, Beskydy, Czech Republic, 29-31 May, <strong>2006</strong>, ISBN 80-248-<br />
1066-2<br />
The 3rd International Conference on Robotics, Robotica <strong>2006</strong>, Iaşi, 7-9<br />
Septembrie <strong>2006</strong>, Buletinul Institutului Politehnic Din Iaşi, Editat De<br />
Universitatea Tehnică “Gh. Asachi”, Iaşi<br />
<strong>2006</strong> IEEE-TTTC, International Conferance on Automation, Quality<br />
And Testing, Robotics, AQTR <strong>2006</strong>, Pag. 243-248<br />
Methods and Models in Automation and Robotics - MMAr <strong>2006</strong> Poland,<br />
Miedzyzdroje, 28-31 August, ISBN 82-60140-88-X, ISBN 978-83-<br />
60140-88-8, Cd Papers – ISBN 83-60140-93-6<br />
IEEE Conference - ICTA <strong>2006</strong> Damasc, Siria<br />
Biomaterials <strong>2006</strong> , Essen, September 5 – 8, <strong>2006</strong><br />
OPTIROB <strong>2006</strong>- The International Conference “Optimization of the<br />
Robots and Manipulators”, Bucharest, <strong>2006</strong><br />
OPTIROB <strong>2006</strong>- The International Conference “Optimization of the<br />
Robots and Manipulators”, Bucharest, <strong>2006</strong><br />
Disturbed Environment<br />
16. <strong>2006</strong> Niculescu, M. C. Mobile IP Security in VPNS Proc. of the 5th WSEAS Int. Conf. on Data Networks, Communications<br />
& Computers, Bucharest, Romania, October 16-17, <strong>2006</strong>, Pp. 119 -<br />
124, WSEAS Press, ISSN: 1790-5117; ISBN: 960-8457-54-8<br />
17. <strong>2006</strong> Niculescu, M. C. Control of Streaming Multimedia Data<br />
in Remote Labs<br />
WSEAS International Conferences Venice, Italy, November 20-22,<br />
<strong>2006</strong><br />
66
18. <strong>2006</strong> Ionut Resceanu, Lucian<br />
Barbulescu<br />
Distributed Modern E-Learning<br />
Systems<br />
Innovation in Education for Electrical and Information Engineering,<br />
Proceedings, Pp. 260-267, ISBN 973-742-350-X, 978-973-742-350-4,<br />
<strong>2006</strong><br />
19. <strong>2006</strong> Popescu Dorin Internet Based PLC Laboratory 17th EAEEIE International Conference on Innovations in Education for<br />
Electrical and Information Engineering, ISBN 973-742-350-X, Pp. 212-<br />
217, June 1-3, <strong>2006</strong>, Craiova, România<br />
20. <strong>2006</strong> Popescu Dorin Telematics Applications for a Body<br />
Feed-Positioning Station<br />
21. <strong>2006</strong> M. Niţulescu, C. Comşa, R.<br />
Mitrică<br />
22. <strong>2006</strong> M. Niţulescu; Ciprian Comşa,<br />
Robert Mitrică, Gabriel<br />
Vladuţ<br />
23. <strong>2006</strong> C. Comşa, R. Mitrică, M.<br />
Niţulescu, G. Vlăduţ<br />
E-Training in Industrial Robotics Using<br />
E-Learning Solutions<br />
Interactive E-Teaching and E-Learning<br />
in Robotics<br />
VIREC, A Virtual Robot Center for E–<br />
Learning<br />
24. <strong>2006</strong> Nicola, S., Cojocaru, D., s.a. A Retrofitting CMM Application, VIIth<br />
International<br />
25. <strong>2006</strong> Stoian Viorel, Bizdoaca Nicu<br />
George, Pana Cristina<br />
26. <strong>2006</strong> Stoian Viorel, Ivanescu<br />
Mircea, Pana Cristina<br />
Edutainment And Robotics - A Great<br />
Relationship<br />
Applications of the Hyper-Redundant<br />
Robotic Structures to Hands of the<br />
People with Great Disabilities<br />
Proceedings of the 6th Int. Conf. on Distance Learning and Web<br />
Engineering, Portugal, September <strong>2006</strong>, Pp. 38-43, ISSN 1790-5117<br />
Proceedings of 1st International Conference "Optimization of The<br />
Robots and Manipulators" OPTIROB <strong>2006</strong>, Romania, 26-28 May <strong>2006</strong>,<br />
Editura Bren Bucureşti, Pp. 219-224, ISBN: (10) 973-648-572-2; (13)<br />
978-973-648-572-5.<br />
Proceedings of 17th EAEEIe Annual Conference on Innovation in<br />
Education for Electrical and Information Engineering, Pp. 329-333,<br />
Craiova, 1-3 June, <strong>2006</strong>, Romania, Craiova Universitaria Publishing<br />
House ISBN: 973-742-350-X ; 978-973-742-350-4.<br />
Proceedings of 7th European Conference E-COMM-LINE <strong>2006</strong>,<br />
September 18-19, <strong>2006</strong>, Section C: "Elearning II Special Section ",<br />
Paper C7-75-<strong>2006</strong>, Editura Ecas Bucureşti, Pp. 412-419, ISBN: 973-<br />
88046-0-4; 973-88046-0-8.<br />
Science Conference Coordinate Measuring Technique, 3-5 April, <strong>2006</strong><br />
Bielsko-Biala - Ustron, Polonia<br />
The 17-Th International Annual Conference On Innovation In<br />
Education For Electrical And Information Engineering (EAEEIE <strong>2006</strong>),<br />
CRAIOVA, ROMANIA, JUNE 1ST-3RD, <strong>2006</strong><br />
The 4th International Industrial Simulation Conference <strong>2006</strong> (ISC<br />
<strong>2006</strong>), University of Palermo, Italy, June 05-07, <strong>2006</strong><br />
27. <strong>2006</strong> Vl. Rasvan Three Lectures on Dissipativeness AQTR<strong>2006</strong>-International Conference on Automation, Quality and<br />
Testing, Robotics, Cluj-Napoca, Romania, mai <strong>2006</strong><br />
28. <strong>2006</strong> Vl. Rasvan Functional Differential Equations of 6th IFAC Workshop on Time Delay Systems , Aquila(Italia), iulie <strong>2006</strong><br />
Lossless Propagation and Almost<br />
Linear Behavior<br />
29. <strong>2006</strong> Vl. Rasvan, S.I.Niculescu, D.<br />
Selisteanu<br />
Lossless Propagation Models<br />
Describing the Transients of Combined<br />
Heat Electricity Generation<br />
6th IFAC Workshop on Time Delay Systems , Aquila(Italia), iulie <strong>2006</strong><br />
67
30. <strong>2006</strong> Bobasu Eugen, Popescu<br />
Dan, Roman Monica<br />
31. <strong>2006</strong> Bobasu Eugen, Popescu<br />
Dan<br />
Some Aspects Regarding the<br />
Nonlinear Control of the Hydraulic<br />
Servomechanisms<br />
Adaptive Nonlinear Control Algorithms<br />
for Robotic Manipulators<br />
32. <strong>2006</strong> Matei Vinatoru, Eugen Iancu Fault detection of the actuator<br />
blocking-experimental results in robot<br />
control structures<br />
33. <strong>2006</strong> Matei Vinatoru, Eugen Iancu The design of control systems for<br />
hydraulic turbines<br />
34. <strong>2006</strong> Matei Vinatoru, Eugen Iancu Implementation of digital systems for<br />
monitoring and control in power plants<br />
35. <strong>2006</strong> Eugen Iancu, Vinatoru Matei Commands Synthesis in Fault<br />
Conditions Application for Flight<br />
Control system<br />
36. <strong>2006</strong> Eugen Iancu, Vinatoru Matei Fault Detection in Dynamic Systems.<br />
Application for Flight Control<br />
37. <strong>2006</strong> Ionela Iancu, Eugen Iancu Advance in Bioengineering Education.<br />
Application for Modelling and<br />
Simulation for Drugs Delivery<br />
38. <strong>2006</strong> Eugen Iancu Optimal Synthesis of Commands for<br />
Control Systems with Fault Actuators<br />
39. <strong>2006</strong> Ionela Iancu, Eugen Iancu Neural Network for Arterial<br />
Baroreceptor Prosthesis<br />
40. <strong>2006</strong> Sendrescu Dorin, Roman<br />
Monica, Bobasu Eugen,<br />
Petre Emil<br />
41. <strong>2006</strong> Sendrescu Dorin Popescu<br />
Dan Bobasu Eugen Petre<br />
Emil<br />
42. <strong>2006</strong> Maican Camelia Vinatoru<br />
Matei, Canureci Gabriela<br />
Interactive Teaching System for the<br />
Modelling and Simulation of<br />
Electropneumatic<br />
Subspace Identification of Pure<br />
Stochastic Systems<br />
The didactical activities planning using<br />
project management theory<br />
Proc. of the 7th Int. Carpathian Contr. Conf. - ICCC <strong>2006</strong>, Ostrava –<br />
Beskydy, Czech Republic, pp. 61-64, ISBN:80-248-1066-2, May 29-31,<br />
<strong>2006</strong>.<br />
Proc. of the WSEAS Conf.: 7th <strong>2006</strong> WSEAS Int. Conf. on Automation<br />
& Information – ICAI’06, Cavtat, Croatia, pp. 83-88, ISBN: 960-8457-<br />
46-7, June 13-15, <strong>2006</strong>.<br />
The 3rd Int. Conf. on Informatics in Control, Automation and Robotics -<br />
ICINCO <strong>2006</strong>, August 1 - 5, <strong>2006</strong>, Setúbal, Portugal, pp 548-551, ISBN<br />
972-8865-60-0.<br />
Aqtr <strong>2006</strong> Cluj-Napoca, May 25-28, <strong>2006</strong>, IEEE - Tttc – Int. Conf. on<br />
Automation, Quality & Testing, Robotics, pp. 32-36, ISBN 1-4244-<br />
0360-X, IEEE Catalog No. 06 EX 1370<br />
Conti <strong>2006</strong> - The 7th Int. Conf. on Technical Informatics, 8-9 June<br />
<strong>2006</strong>, Timisoara, Ed. Politehnica, pp-7-12, ISBN: (10)973-625-319-8<br />
IEEE-TTTC-Int. Conf. Automation, Quality and Testing, Robotics<br />
AQTR <strong>2006</strong>, Cluj-Napoca, vol. II, pag. 47-52.Lucrare indexata in baza<br />
de date IEEE Xplore<br />
7th Int. Carpathian Control Conf. – ICCC’<strong>2006</strong>, Proc. of Conf., ISBN<br />
80-248-1066-2, pag. 193-196.<br />
The 17th EAEEIE Annual Conf. on Innovation in Education for<br />
Electrical and Iformation Engineering, pp. 153-158, Ed. Universitaria,<br />
ISBN 973-742-350-X, 978-973-742-350-4.<br />
7th Int. Conf. on Technical Informatics – CONTI <strong>2006</strong>, vol. 1, pag. 181-<br />
184, Ed. Politehnica, ISBN (10) 973-625-320-1.<br />
7th Int. Conf. on Technical Informatics – CONTI <strong>2006</strong>, vol. 1, pag. 239-<br />
242, Ed. Politehnica, ISBN (10) 973-625-320-1.<br />
Proc. of 17th EAEEIE Annual Conf. on Innovation in Education for<br />
Electrical and Information Engineering (EIE), Craiova, Romania, pp.<br />
19-24, ISBN 973-742-350-X, 978-973-742-350-4, 1-3 June <strong>2006</strong><br />
Proc. of Int. Conf. on Automation, Quality&Testing, Robotics AQTR<br />
<strong>2006</strong> (THETA 15), Cluj-Napoca, Romania,vol. I, pp. 37-43, ISBN 1-<br />
4244-0360-X, May 25-28, <strong>2006</strong><br />
Innovation in Education for Electrical and Information Engineering,<br />
Proceedings of 17th EAEEIE Conference, Craiova, pp 47-53, ISBN<br />
978-973-742-350-4.<strong>2006</strong><br />
68
43. <strong>2006</strong> Danciu Daniela, Răsvan<br />
Vladimir<br />
44. <strong>2006</strong> Petre Emil, Bobasu Eugen,<br />
Selisteanu Dan<br />
45. <strong>2006</strong> Petre Emil, Selisteanu Dan<br />
Sendrescu Dorin<br />
46. <strong>2006</strong> Selisteanu Dan Petre Emil,<br />
Handam H. Popescu Dorin<br />
On coupled oscillators Proc. of the 7th Int. Conf. on Technical Informatics - CONTI <strong>2006</strong>,<br />
Timisoara, June 8-9, <strong>2006</strong>, vol. 1, pp. 46-51, ISBN: 973-625-320-1, Ed.<br />
Politehnica.<br />
On adaptive control of a class of<br />
nonlinear systems using neural<br />
networks<br />
Neural Based Adaptive Control of a<br />
Class of Dynamical Nonlinear<br />
Processes<br />
Open Loop Vibrational Control of a<br />
Recycled Bioprocess<br />
Proc. of the 7th Int. Carpathian Control Con. - ICCC <strong>2006</strong>, May 29-31,<br />
<strong>2006</strong>, Ostrava – Beskydy, Czech Republic, pp. 433-436, ISBN 80-248-<br />
1066-2.<br />
Proc. of the 7th WSEAS Int. Conf. on Automation & Information ICAI<br />
’06, Cavtat, Croatia, June 13-15, pp. 173-178, ISBN: 960-8457-46-7.<br />
Proc. of the 7th WSEAS Int. Conf. on Automation & Information ICAI<br />
’06, Cavtat, Croatia, June 13-15, pp. 71-76, ISBN: 960-8457-46-7.<br />
47. <strong>2006</strong> Petre Emil, Selisteanu Dan<br />
Popescu Dan., Bobasu<br />
Eugen<br />
48. <strong>2006</strong> Selisteanu Dan, Sendrescu<br />
Dorin, Ionete Cosmin, Petre<br />
Emil<br />
49. <strong>2006</strong> Popescu Dan, Rasvan<br />
Vladimir<br />
50. <strong>2006</strong> Popescu Dan, Petre Emil,<br />
Bobasu Eugen<br />
Sliding Mode Control and Adaptive<br />
Control of a Nonlinear Continuous<br />
Bioprocess (invited paper)<br />
On Sliding Mode Control and<br />
Identification of a Flexible Beam<br />
(invited paper)<br />
Stabilization of a Vibrational Motion<br />
Using a Delayed Control Action<br />
(Invited Paper)<br />
On the Stability Robustness and<br />
Robustification of the Exact<br />
Linearization Method<br />
51. <strong>2006</strong> Popescu Dan On the State Feedback Control with<br />
Integral Action for Input Delay Systems<br />
52. <strong>2006</strong> Popescu Dan, Bobasu Modelling and Robust Control of an<br />
Eugen<br />
Electrohydraulic System<br />
53. <strong>2006</strong> C. Marin, A. Petrişor, V.<br />
Fincă<br />
54. <strong>2006</strong> C. Marin, A. Petrişor, V.<br />
Fincă<br />
Identification of systems with friction<br />
via distributions<br />
Self Tuning Based Control of<br />
Mechanical Systems with Friction<br />
12th IEEE Int. Conf. Methods and Models in Automation and Robotics<br />
– MMAR <strong>2006</strong>, pp. 49-54, 28 - 31 August, Miedzyzdroje, Poland, ISBN<br />
83-60140-88-X, 83-60140-93-6.<br />
12th IEEE Int. Conf. Methods and Models in Automation and Robotics<br />
– MMAR <strong>2006</strong>, pp. 49-54, 55 - 61 August, Miedzyzdroje, Poland, ISBN<br />
83-60140-88-X, 83-60140-93-6.<br />
12th IEEE Int. Conf. Methods and Models in Automation and Robotics,<br />
Miedzyzdroje, Poland, 28 - 31 August, <strong>2006</strong>, pp. 145-150, ISBN: 83-<br />
60140-93-6.<br />
The 7th Int. Carpathian Contr. Conf. - ICCC <strong>2006</strong>, May 29-31, <strong>2006</strong>,<br />
Ostrava – Beskydy, Czech Republic, pp. 441-444, ISBN: 80-248-1066-<br />
2.<br />
Proc. of 7th Int. Conf. on Technical Informatics – CONTI’06, Timişoara,<br />
June 8-9, <strong>2006</strong>, vol. 1, pp. 99-102, ISBN: 973-625-320-1.<br />
Proc. of the 7th WSEAS Int. Conf. on Automation & Information –<br />
ICAI’06, Cavtat, Croaţia, June 13-15, <strong>2006</strong>, pp. 77-82, ISBN: 960-<br />
8457-46-7.<br />
CONTI’<strong>2006</strong>, The 7th INTERNATIONAL CONFERENCE ON<br />
TECHNICAL INFORMATICS, 8 - 9 June <strong>2006</strong>, TIMISOARA,<br />
ROMANIA<br />
Proceedings of the 2nd WSEAS International Conference on APPLIED<br />
and THEORETICAL MECHANICS (MECHANICS '06), Venice, Italy,<br />
November 20-22, <strong>2006</strong>, pp. 197-202, ISSN: 1790-5095; ISSN:1790-<br />
5117; ISBN:960-8457-56-4<br />
69
55. <strong>2006</strong> Ionete, C., A. Çela, M.E.M.<br />
Ben Gaid<br />
Controllability and Observability of<br />
Input /Output Delayed Discrete<br />
Systems<br />
56. <strong>2006</strong> Ionete, C., A. Çela Structural Properties and Stabilization<br />
of NCS with Medium Access<br />
Constraints<br />
57. <strong>2006</strong> Ben Gaid, M.E.M., A. Çela,<br />
Y. Hamam, C. Ionete<br />
Optimal scheduling of control tasks<br />
with state feedback resource allocation<br />
58. <strong>2006</strong> Lioy, Marius Marian, Natalia<br />
Moltchanova, Massimiliano<br />
Pala<br />
PKI past, present and future<br />
59. <strong>2006</strong> Marius Marian Deploying the Online Certificate Status<br />
Protocol within high-volume PKI<br />
60. <strong>2006</strong> M. Vinatoru, Eugen Iancu, G.<br />
Canureci and C. Maican<br />
environments<br />
Fault detection method for two inputs<br />
and two outputs control system,<br />
American Control Conference, <strong>2006</strong>, June 14-16, Minneapolis, <strong>2006</strong> E-<br />
ISBN: 1-4244-0210-7, ISBN: 1-4244-0209-3, pp. 3513-35-16, Digital<br />
Object Identifier: 10.1109/ACC.<strong>2006</strong>.1657262<br />
Proceedings of the <strong>2006</strong> Conference on Control and Decision, pp.<br />
1141-1146, San Diego, California, USA, December 13-15, <strong>2006</strong><br />
American Control Conference, <strong>2006</strong>, June 14-16, <strong>2006</strong>, E-ISBN: 1-<br />
4244-0210-7, ISBN: 1-4244-0209-3, Digital Object Identifier<br />
10.1109/ACC.<strong>2006</strong>.1655373<br />
Selected paper of the EuroPKI conference 2005 publicat in<br />
International Journal of Information Security, Springer-Verlag, Vol 5,<br />
No. 1, pp. 18 – 29, Ianuarie <strong>2006</strong><br />
Simpozionul international SINTES 13, Vol. 1, pp. 58 – 63, ISBN 978-<br />
973-742-839-4, 978-973-742-841-7, Octombrie <strong>2006</strong><br />
IFAC Workshop ICPS’07 – Convergence of Information Technologies<br />
and Control Methods with Power Plants and Power Systems, 9-12 iulie<br />
2007, Cluj-Napoca, Ed. Mediamira Science Publisher, Preprints, ISBN<br />
978-973-713-180-5, pag. 266-271.<br />
61. 2007 Bîzdoacă Nicu George Smart Materials and structure Conferinta Internationala Electronics, Computers and Artificial<br />
Intelligence - ECAI 2007 - 29th – 30th June, 2007<br />
62. 2007 Tanasie, R., Cojocaru, D.,<br />
Ivănescu, M.<br />
A Real-Time Solution for Target Reach<br />
in a Static Evironement<br />
Proceedings CSCS-16 16th International Conference on Control<br />
Systems and Computer Science, ISBN 978-973-718-741-3, 742-0, p<br />
63. 2007 Dumitru, S., Cojocaru, D. Visualization Application for Sensor<br />
Networks<br />
373-380, 22-25 May, 2007, Bucharest, Romania.<br />
SINTES 13 International Symposium on Systems Theory, Robotics,<br />
Computers & Process Informatics, vol. 1, ISBN 978-973-742-839-4,<br />
978-973-742-840-0, p227-232, Craiova, Romania, 2007<br />
64. 2007 Ivanescu, M., Cojocaru, D. Visual Servoing By Artificial Potential<br />
Methods Of A Hyperredundant Robot<br />
Proceedings of 16th International Workshop on Robotics in Alpe-Adria-<br />
Danube Region - RAAD 2007, June 7-9, Ljubljana, Slovenia<br />
65. 2007 Cojocaru, D Fuzzy Techniques in Computer Vision The 7th WSEAS International Conference on Signal Processing,<br />
Computational Geometry & Artificial Vision (ISCAGV '07), ISBN 960-<br />
8457-51-3, Plenary Lecture, 24-26 August, 2007Vouliagmeni, Athens,<br />
Greece [ISI Proc., INSPEC]<br />
66. 2007 Popescu Dorin Telematics applications for a bearing<br />
handling-fitting station<br />
The 18th EAEEIE International Conference on Innovations in<br />
Education for Electrical and Information Engineering, paper M2C, ISBN<br />
978-80-01-03746-1, July 2-4, 2007, Prague, Czech Republic.<br />
70
67. 2007 Popescu Dorin Sharing of educational and research<br />
resources<br />
68. 2007 Popescu Dorin Tele-programming for a mobile robot<br />
via Internet<br />
69. 2007 M.C. Niculescu, Elena<br />
Niculescu, I.Resceanu<br />
Multiuser Control of a Mobile Platform<br />
using Wireless Communication<br />
Multimedia Data<br />
70. 2007 Ionut Resceanu Implementation of genetic algorithms<br />
in self-learning mobile robots<br />
71. 2007 M. Niţulescu Some considerations regarding<br />
modelling and control of the two-wheel<br />
differential drive mobile robot<br />
72. 2007 M. Niţulescu Solutions in modelling and control for a<br />
class of wheeled mobile robots<br />
73. 2007 M. Niţulescu Modelling and control for a class of<br />
mobile robots<br />
74. 2007 M. Niţulescu; V. Stoian; Modelling and control aspects for a<br />
type of mobile robot<br />
75. 2007 M. Niţulescu Some considerations regarding<br />
modelling and control for a class of<br />
mobile robots<br />
76. 2007 Stoian Viorel, Pana Cristina Fuzzy Logic Algorithm For Mobile<br />
Robot Control<br />
77. 2007 Stoian Viorel, Nitulescu<br />
Mircea, Pana Cristina<br />
Hexapod Leg Control Algorithm In<br />
Fault Conditions<br />
The 18th EAEEIE International Conference on Innovations in<br />
Education for Electrical and Information Engineering, ISBN 978-80-01-<br />
03746-1, July 2-4, 2007, Prague, Czech Republic.<br />
7th WSEAS Int. Conf. on APPLIED INFORMATICS and<br />
COMMUNICATIONS (AIC '07), Athens, Greece, paper 564-099.<br />
p.228-p235, WSEAS TRANSACTIONS ON COMMUNICATIONS,<br />
Issue 1, Volume 6, January 2007, ISSN 1109-2742<br />
SINTES 13, Vol. I, p285-p291, ISBN 978-973-742-839-4, Octombrie<br />
2007<br />
Proceedings of 16-th International Conference on Control Systems<br />
and Computer Science – CSCS 16, Bucharest, Romania, May 22-25,<br />
2007, Editura PRINTECH, Bucharest, Romania, 2007, Vol.1, pp.309-<br />
314, ISBN: 973-8449-89-8, 973-8449-90-1.<br />
Proceedings of 16th International Workshop on Robotics in Alpe-Adria-<br />
Danube Region - RAAD 2007, University of Ljubljana, Slovenia,<br />
Ljubljana, June 6-9, 2007, Sesion „Mobile Robotics I”, CD Proceedings<br />
for extended papers, Abstract volume, pp. 13, ISBN 978-961-243-066-<br />
5.<br />
Proceedings of the 4th International Federation of Automatic Control<br />
Conference on Management and Control of Production and Logistics -<br />
IFAC MCPL 2007, Sibiu, Romania, 27 – 30 September 2007, Vol. 1,<br />
Invited Sesion „Advances in Control Methods for Robotics and<br />
Manufacturing Systems”, pp. 115-120, ISBN:978-973-739-481-1.<br />
Proceedings of the 3rd International Conference Mechatronic Systems<br />
and Materials - MSM 2007, Kaunas, Lithuania 27 - 29 September,<br />
2007, pp. 296-300, ISSN: 1822-8283.<br />
Proceedings of International Symposium on Systems Theory –<br />
SINTES 13, Section M:"Mechatronic Systems" Romania, October 18-<br />
20, 2007, Editura UNIVERSITARIA Craiova, Vol 2, pp. 261-266, ISBN:<br />
978-973-742-839-4 ; 978-973-742-840-0.<br />
The 4th International Conference On Informatics In Control,<br />
Automation And Robotics (ICINCO-2007), Angers, France, May 9-12,<br />
2007.<br />
The 3rd International Conference On Mechatronic Systems And<br />
Materials 2007 (MSM 2007), September 27-29, 2007, Kaunas,<br />
Lithuania.<br />
71
78. 2007 Niculescu Marius A Solution for Equalization in Wireless<br />
Channel Communications<br />
79. 2007 Danciu Daniela, Rasvan<br />
Vladimir<br />
80. 2007 Bobasu Eugen, Popescu<br />
Dan, Roman Monica<br />
81. 2007 Bobasu Eugen, Popescu<br />
Dan, Roman Monica<br />
82. 2007 M. Vînatoru, Eugen Iancu, G.<br />
Canureci, C. Maican<br />
Output feedback stabilization versus<br />
delay<br />
Some Aspects of Modeling and Robust<br />
Control of a Robotic Manipulator<br />
Some Aspects of Modeling and Robust<br />
Control of a Robotic Manipulator<br />
Advanced Control of Aerobic Industrial<br />
WasteWater Treatment,<br />
83. 2007 Eugen Iancu, M. Vînatoru Design Method for Control System in<br />
Fault Condition,<br />
84. 2007 C. Maican, M. Vînatoru,<br />
Eugen Iancu, G. Canureci<br />
85. 2007 M. Vînatoru, G. Canureci,<br />
Eugen Iancu, C. Maican<br />
Fault Detection and Control in the<br />
Steam Overheater<br />
Level and Temperature Control Using<br />
the Educational Kit Festo<br />
86. 2007 Eugen Iancu Analytical Methods for Fault Detection<br />
in Power Plants,<br />
87. 2007 Matei Vinatoru, Gabriela<br />
Canureci, Camelia Maican,<br />
Eugen Iancu<br />
88. 2007 M. Vinatoru, C. Vinatoru,<br />
Eugen Iancu<br />
Level and temperature control study<br />
using FESTO kit in a laboratory stand<br />
Experimental Study of Distributed<br />
Control for Heat Transfer Processes,<br />
11th WSEAS CSCC Multiconference WSEAS International<br />
Conference on COMMUNICATIONS and COMPUTERS Agios<br />
Nikolaos, Crete Island, Greece, July 23-28 2007<br />
IFAC Workshop on Time Delay Systems 2007, Nantes, France<br />
7th WSEAS International Conference on Systems Theory and<br />
Scientific Computation ISTASC'07<br />
8th Int. Carpathian Control Conference ICCC 2007<br />
Fourth International Conference on Informatics in Control, Automation<br />
and Robotics, ICINCO 2007, 9-12 mai 2007, Angers, Franta, lucrare<br />
publicata in Proceedings ISBN 978-972-8865-84-9, sectiunea Signal<br />
Processing, Systems Modeling and Control, pag. 165-170.<br />
16th International Conference on Control Systems and Computer<br />
Science, CSCS 16, Univ. Politehnica Bucureşti, 22-25 mai 2007,<br />
Proceedings vol. 1, ISBN 978-973-718-741-3, pag. 346-350.<br />
16th International Conference on Control Systems and Computer<br />
Science, CSCS 16, Univ. Politehnica Bucureşti, 22-25 mai 2007,<br />
Proceedings vol. 1, ISBN 978-973-718-741-3, pag. 351-357.<br />
16th International Conference on Control Systems and Computer<br />
Science, CSCS 16, Univ. Politehnica Bucureşti, 22-25 mai 2007,<br />
Proceedings vol. 1, ISBN 978-973-718-741-3, pag. 647-652.<br />
IFAC Workshop ICPS’07 – Convergence of Information Technologies<br />
and Control Methods with Power Plants and Power Systems, 9-12 iulie<br />
2007, Cluj-Napoca, Ed. Mediamira Science Publisher, Preprints, ISBN<br />
978-973-713-180-5, pag. 251-256.<br />
The 3rd WSEAS International Conference on Dynamical Systems and<br />
Control (CONTROL'07), Arcachon, France, October 13-15, 2007,<br />
Proceedings of the Conference, ISBN 978-960-6766-08-4, ISSN 1790-<br />
5117, pag. 247-252.<br />
The 3rd WSEAS International Conference on Dynamical Systems and<br />
Control (CONTROL'07), Arcachon, France, October 13-15, 2007,<br />
Proceedings of the Conference, ISBN 978-960-6766-08-4, ISSN 1790-<br />
5117, pag. 253-256.<br />
72
89. 2007 Ionela Iancu, Eugen Iancu The Analyse of the Heart Sounds for<br />
Automated Diagnosis<br />
90. 2007 Camelia Maican, M.<br />
Vinatoru, Eugen Iancu,<br />
Gabriela Canureci<br />
91. 2007 Gabriela Canureci, Camelia<br />
Maican, Matei Vinatoru,<br />
Eugen Iancu<br />
The Control of the Temperature of in<br />
the Steam Overheater<br />
Digital Library of Burners Processe of<br />
Faults of the Boiler<br />
92. 2007 Matei Vinatoru Design and Implementation of<br />
Advanced Algorithms Using Holonic<br />
Structure Concept<br />
93. 2007 Matei Vinatoru Monitoring and Control of Hydro Power<br />
Plant<br />
94. 2007 Matei Vinatoru Fault Detection and Isolation Study for<br />
Power Plant Process and Control<br />
System<br />
95. 2007 Petre Emil, Popescu Dan A Multivariable Adaptive Controller for<br />
a Class of Recycled Depollution<br />
Bioprocesses<br />
96. 2007 Petre Emil, Selişteanu Dan,<br />
Şendrescu Dorin<br />
97. 2007 Petre Emil, Popescu Dan,<br />
Selişteanu Dan<br />
98. 2007 Selişteanu Dan, Popescu<br />
Dorin, Barbu Cristina<br />
99. 2007 Selişteanu Dan, Petre Emil,<br />
Popescu Dorin, Bobaşu<br />
Eugen<br />
On Adaptive Control of an Anaerobic<br />
Digestion Bioprocess<br />
Finite Dimensional Models of<br />
Nonlinear Distributed Parameter<br />
Bioreactors via Orthogonal Collocation<br />
On-line State Estimation and<br />
Identification of a Fed-Batch<br />
Bioprocess<br />
High Frequency Control Strategies for<br />
a Continuous Bioprocess: Sliding<br />
Mode Control versus Vibrational<br />
Control<br />
International Symposium on System Theory, SINTES 13, Craiova, 18-<br />
20 oct. 2007, Proceedings ISBN: 978-742-839-4, 978-973-742-840-0,<br />
vol. 1, pag. 111 – 116.<br />
International Symposium on System Theory, SINTES 13, Craiova, 18-<br />
20 oct. 2007, Proceedings ISBN: 978-742-839-4, 978-973-742-840-0,<br />
vol. 1, pag. 129 – 133.<br />
International Symposium on System Theory, SINTES 13, Craiova, 18-<br />
20 oct. 2007, Proceedings ISBN: 978-742-839-4, 978-973-742-840-0,<br />
vol. 1, pag. 60 – 65.<br />
International Symposium on System Theory, SINTES 13, Craiova, 18-<br />
20 oct. 2007, Proceedings ISBN: 978-742-839-4, 978-973-742-840-0,<br />
vol. 1, pag. 203 – 208.<br />
IFAC Workshop ICPS’07 – Convergence of Information Technologies<br />
and Control Methods with Power Plants and Power Systems, 9-12 iulie<br />
2007, Cluj-Napoca, Ed. Mediamira Science Publisher, Preprints, ISBN<br />
978-973-713-180-5, pag. 44-55.<br />
IFAC Workshop ICPS’07 – Convergence of Information Technologies<br />
and Control Methods with Power Plants and Power Systems, 9-12 iulie<br />
2007, Cluj-Napoca, Ed. Mediamira Science Publisher, Preprints, ISBN<br />
978-973-713-180-5, pag. 266-271.<br />
9th WSEAS Int. Conf. on Mathematical and Computational Methods in<br />
Science and Engineering (MACMESE'07), Nov. 5-7, 2007, Trinidad<br />
and Tobago, pp. 155-160, ISBN 978-960-6766-11-4.<br />
7th WSEAS Int. Conf. on Systems Theory and Scientific Computation<br />
(ISTASC'07), Aug. 24-26, 2007, Vouliagmeni, Athens, Greece, pp. 7-<br />
12, ISSN: 1790-5117, ISBN: 978-960-6766-01-5.<br />
8th Int. Carpathian Control Conference ICCC 2007, May 24-27, 2007,<br />
Štrbské Pleso, High Tatras, Slovak Republic, pp. 548-551, ISBN 978-<br />
80-8073-805-1.<br />
9th WSEAS Int. Conf. on Mathematical and Computational Methods in<br />
Science and Engineering (MACMESE'07), Nov. 5-7, 2007, Trinidad<br />
and Tobago, pp. 85-90, ISBN 978-960-6766-11-4.<br />
13th IEEE/IFAC International Conference on Methods and Models in<br />
Automation and Robotics MMAR 2007, 978-83-751803-3-6, pp. 77-84,<br />
August 27-30, 2007, Szczecin, Poland.<br />
73
100. 2007 M. Marian Deploying the online certificate status<br />
protocol within high-volume PKI<br />
environments<br />
101. 2007 G. Marian, N. Enescu, E.<br />
Dumitrascu, M. Marian<br />
Generator de prezentari multimedia<br />
pentru diverse categorii de produse<br />
International Symposium on Systems Theory - SINTES13, Craiova<br />
Jurnalul conferintei internationale de sisteme electromecanice si<br />
energetice SIELMEN’07, editia a VI-a, Chisinau (R. Moldova)<br />
102. 2007 Monica Roman, Eugen<br />
Bobasu<br />
103. 2007 Roman Monica, Dorin<br />
Sendrescu, Cosmin Ionete<br />
104. 2007 Monica Roman, Eugen<br />
Bobasu, Dorin Sendrescu<br />
105. 2007 C. Marin, E. Petre, D.<br />
Selisteanu<br />
106. 2007 C. Marin, V. Finca, R.<br />
Zglimbea<br />
107. 2007 Sendrescu Dorin, Selisteanu<br />
Dan, Ionete Cosmin<br />
108. 2007 Sendrescu Dorin, Roman<br />
Monica, Ionete Cosmin<br />
109. 2007 D. Sendrescu, E. Petre, D.<br />
Popescu, E. Bobasu<br />
110. 2007 D. Sendrescu, D. Selisteanu,<br />
C. Ionete, E. Petre<br />
111. 2007 Popescu Dan, Ionete<br />
Cosmin, Sendrescu Dorin<br />
112. 2007 Popescu Dan, Răsvan<br />
Vladimir<br />
113. 2007 Vl. Rasvan, Dan Popescu, D.<br />
Danciu<br />
Some aspects regarding bond graph<br />
models of electrohydraulic servovalves<br />
Network distributed real-time Quanser<br />
experiments<br />
Nonlinear Modeling of a Quanser<br />
Flexible Link<br />
Wastewater Biodegradation Process<br />
Identification; a Multi Layer Approach<br />
via Distributions<br />
Adaptive control of systems with<br />
dynamic friction<br />
Identification of continuous-time<br />
systems using the moments method<br />
Network distributed real-time Quanser<br />
experiments<br />
Weighted Moments Based<br />
Identification of Continuous-Time<br />
Systems<br />
Sliding Mode Observers for Quanser<br />
Rotational Experiments<br />
Robust Control Methods Applied to a<br />
Flexible Beam Quanser Experiment<br />
Stabilization of a vibrational motion<br />
using a delayed control action<br />
Réseaux, interconnexions et retards<br />
(Apperçu des comportements<br />
qualitatifs)<br />
8-th International Carpathian Control Conference ICCC’2007<br />
18-th Annual Conference on Innovation in Education for Electrical and<br />
Information Engineering EAEEIE 2007<br />
International Symposium on System Theory, SINTES 13<br />
Proceedings of the 2007 WSEAS Int. Conference on Cellular &<br />
Molecular Biology - Biophysics & Bioengineering, Athens, Greece,<br />
August 26-28, 2007 pp.1-6, ISSN:1109-2769; ISBN:978-960-6766-03-6<br />
International Symposium on System Theory, SINTES13, Craiova,<br />
Romania, Oct. 2007, ISBN 978-973-742-839-4, pp. 134-139<br />
8-th International Carpathian Control Conference ICCC'2007<br />
18th EAEEIE Annual Conference Innovation in Education for Electrical<br />
and Information Engineering<br />
7th WSEAS International Conference on System Theory and Scientific<br />
Computation (ISTASC'07)<br />
13th IEEE/IFAC International Conference on Methods and Models in<br />
Automation and Robotics MMAR 2007, ISBN 978-83-751803-2-9<br />
The 8th International Carpathian Control Conference - ICCC 2007,<br />
Strbske Pleso, Slovak Republic, pp. 528-531, ISBN: 978-80-8073-805-<br />
1<br />
12th IEEE Int. Conf. Methods and Models in Automation and Robotics,<br />
Miedzyzdroje, Poland, , pp. 145-150, ISBN: 83-60140-93-6<br />
8-th International Carpathian Control Conference ICCC'2007<br />
74
114. 2007 Vl. Rasvan Functional Differential Equations<br />
associated to Propagation<br />
115. 2007 Vl. Rasvan, Dan Popescu, D. Networks and synchronization<br />
Danciu<br />
116. <strong>2008</strong> Petre Emil,<br />
Selişteanu Dan,<br />
Şendrescu Dorin<br />
117. <strong>2008</strong> Selişteanu Dan,<br />
Petre Emil,<br />
Marin Constantin,<br />
Şendrescu Dorin<br />
118. <strong>2008</strong> Petre Emil,<br />
Selişteanu Dan,<br />
Şendrescu Dorin,<br />
Ionete Cosmin<br />
119. <strong>2008</strong> Petre Emil,<br />
Selişteanu Dan,<br />
Şendrescu Dorin<br />
120. <strong>2008</strong> Petre Emil,<br />
Bobaşu Eugen<br />
121. <strong>2008</strong> Selişteanu Dan,<br />
Marin Constantin,<br />
Iancu Eugen<br />
122. <strong>2008</strong> Marin Constantin,<br />
Selisteanu Dan,<br />
Sendrescu Dorin,<br />
Fincă Virginia<br />
123. <strong>2008</strong> Marin Constantin,<br />
Selisteanu Dan,<br />
Sendrescu Dorin,<br />
Neural Networks Based Adaptive<br />
Control for a Class of Time Varying<br />
Nonlinear Processes<br />
Estimation and Adaptive Control of a<br />
Fed-batch Bioprocess<br />
Nonlinear and Neural Networks Based<br />
Adaptive Control for a Wastewater<br />
Treatment Bioprocess<br />
Adaptive Control Strategies for a Class<br />
of Anaerobic Depollution Bioprocesses<br />
A new adaptive control strategy for a<br />
class of anaerobic wastewater<br />
treatment bioprocess,<br />
Nonlinear Control and Identification of<br />
an Aerobic Fermentation Depollution<br />
Bioprocess<br />
Identification by Distributions of<br />
Continuous Time Systems with<br />
Nonlinear Feedback.<br />
Identification of Wastewater<br />
Biodegradation Process with Time<br />
Variable Parameters,<br />
18th EAEEIE Annual Conference Innovation in Education for Electrical<br />
and Information Engineering<br />
7th WSEAS International Conference on System Theory and Scientific<br />
Computation (ISTASC'07)<br />
Proceedings of the International Conference on Control, Automation<br />
and Systems ICCAS <strong>2008</strong>, Oct. 14-17, COEX, Seoul, Korea, pp. 1355-<br />
1360, ISBN 978-89-93215-01-4-98560 [IEEE Xplore].<br />
Proceedings of the International Conference on Control, Automation<br />
and Systems ICCAS <strong>2008</strong>, Oct. 14-17, COEX, Seoul, Korea, pp. pp.<br />
1349-1354, ISBN 978-89-93215-01-4-98560 [IEEE Xplore].<br />
12th International Conference on Knowledge-Based and Intelligent<br />
Information & Engineering Systems - KES<strong>2008</strong>, 3-5 Sept. <strong>2008</strong>,<br />
Zagreb, Croatia, In: Knowledge-Based and Intelligent Information &<br />
Engineering Systems: KES <strong>2008</strong>, (Editors: I. Lovrek, R.J. Howlett, and<br />
L.C. Jain), Part II, LNAI 5178, pp. 273–280, Springer-Verlag, Berlin,<br />
Heidelberg, <strong>2008</strong>, ISSN 0302-9743, ISBN 978-3-540-85564-4<br />
[SpringerLink].<br />
Proceedings of Int. Conf. on Automation, Quality and Testing, Robotics<br />
AQTR <strong>2008</strong> (THETA 16), May 22-25, <strong>2008</strong>, Cluj-Napoca, Romania,<br />
Tome II, pp. 159-164, ISBN 978-1-4244-2576-1 [IEEE Xplore].<br />
Proceedings of the 4th IASME/WSEAS International Conference on<br />
Energy, Environment, Ecosystems and Sustainable Development<br />
(EEESD’08), pp. 303-308, Algarve, Portugal, June 11-13, <strong>2008</strong>, ISBN:<br />
978-960-6766-71-8, ISSN: 1790-5059. [ISI Proc.]<br />
Proceedings of the 4th IASME/WSEAS Int. Conf. on Energy,<br />
Ecosystems and Sustainable Development (EEESD'08), ISBN 978-<br />
960-6766-71-8, pp. 309-314, June 11-13, <strong>2008</strong>, Algarve, Portugal.<br />
Proceedings of the 8th WSEAS International Conference on Systems<br />
Theory and Scientific Computation (ISTASC’08),Rhodes, Greece,<br />
August 20-22, <strong>2008</strong>, pp. 300-305, ISBN 978-960-6766-96-1, [BDI-<br />
INSPEC]<br />
Proceedings of the 4 th IASME/WSEAS International Conference on<br />
Energy, Ecosystems and Sustainable Developments, Algarve,<br />
Portugal, June 11-13 <strong>2008</strong>, pp. 318-323, ISBN 978-960-6766-63-3,<br />
75
Fincă Virginia<br />
124. <strong>2008</strong> Finca Virginia,<br />
Zglimbea Radu,<br />
Marin Constantin<br />
125. <strong>2008</strong> Zglimbea Radu,<br />
Finca Virginia,<br />
Marin Constantin<br />
126. <strong>2008</strong> Marin Constantin, Selisteanu<br />
Dan, Sendrescu Dorin, Fincă<br />
Virginia, Petrisor Anca<br />
127. <strong>2008</strong> Badea Petrică,<br />
Danciu Daniela,<br />
Davidescu Lidia<br />
128. <strong>2008</strong> Iancu Eugen<br />
Iancu Ionela<br />
Mota Maria<br />
129. <strong>2008</strong> Iancu Eugen<br />
Mota Maria<br />
Iancu Ionela<br />
Theoretical Methods and Practical<br />
Aspects in Continous Time System<br />
Identification<br />
Identification of Systems with Friction<br />
via Distributions using simplified Dahl<br />
model<br />
A Refined Base Identification of<br />
Continuous Time Hammmerstein<br />
Systems<br />
Preliminary results on using an<br />
extension of gradient method for<br />
detection of red lesions on eye fundus<br />
photographs<br />
Statistical analysis of the blood<br />
glucose data for automated diagnosis<br />
Method for the analysing of blood<br />
glucose dynamics in diabetes mellitus<br />
patients,<br />
[BDI-INSPEC].<br />
Proceedings NAUN Int. Conference on Advanced in Applied Math.,<br />
Systems, Communications and Computers, Marathon Beach, Attica,<br />
Greece, June 1-3, <strong>2008</strong>, pg. 126-133, ISBN: 978 – 960 – 6766 – 69 –<br />
5, ISSN: 1790 – 2769, [BDI-INSPEC].<br />
Proceedings NAUN Int. Conference on Advanced in Applied Math.,<br />
Systems, Communications and Computers, Marathon Beach, Attica,<br />
Greece, June 1-3, <strong>2008</strong>, pg. 133-139, ISBN: 978 – 960 – 6766 – 69 –<br />
5, ISSN: 1790 – 2769 [BDI-INSPEC].<br />
Proceedings of the International Carpathian Control Conference<br />
(ICCC’<strong>2008</strong>), Sinaia, Romania, May 25-28, <strong>2008</strong>, pp. 408-411. ISBN<br />
978-973-746-897-0<br />
IEEE-TTTC International Conference on Automation, Quality &<br />
Testing, Robotics AQTR <strong>2008</strong>, 22-25 Mai, <strong>2008</strong>, Cluj-Napoca,<br />
Romania<br />
Mathematics and Computers in Biology aAnd Chemistry, Pages: 17-<br />
21, 9th WSEAS International Conference on Mathematics and<br />
Computeres in Biology and Chemistry Conference, Bucharest,<br />
Romania<br />
IEEE International Conference On Automation, Quality And Testing,<br />
Robotics (AQTR <strong>2008</strong>), THETA 16th Edition, vol. III, Proceedings<br />
Pages: 60-65 Cluj Napoca, Romania.<br />
130. <strong>2008</strong> Marian Marius A Case Study for Delegated Certificate<br />
Validation<br />
131. <strong>2008</strong> Marian Marius,<br />
Sendroiu Eugen<br />
132. <strong>2008</strong> Şendrescu Dorin,<br />
Selişteanu Dan,<br />
Marin Constantin<br />
133. <strong>2008</strong> Şendrescu Dorin,<br />
Popescu Dan,<br />
Ionete Cosmin,<br />
Roman Monica<br />
A PKI Case Study: Implementing the<br />
SCVP Protocol<br />
Subspace Based Identification of<br />
Unstable Systems<br />
Neural networks identification of<br />
wastewater biodegradation process<br />
Proceedings of International Carpathian Control Conference<br />
ICCC<strong>2008</strong>, Sinaia, Romania, Mai <strong>2008</strong><br />
Proceedings of WSEAS Internet Security and Privacy Conference<br />
ISP08, Cairo, Egipt, Decembrie <strong>2008</strong><br />
Proc. of the <strong>2008</strong> IEEE International Conference on Automation,<br />
Quality and Testing, Robotics (AQTR <strong>2008</strong>), THETA 16th edition, IEEE<br />
Catalog no. CFP08AQT-PRT, ISBN 978-1-4244-2576-1, Tome II, pp.<br />
153-158, May 22-25, <strong>2008</strong>, Cluj-Napoca, Romania<br />
Proc. of 4th IASME/WSEAS Int. Conf. on Energy, Ecosystems and<br />
Sustainable Development (EEESD'08), ISBN 978-960-6766-71-8, pp.<br />
298-303, June 11-13, <strong>2008</strong>, Algarve, Portugal.<br />
76
134. <strong>2008</strong> Maican Camelia,<br />
Vînătoru Matei,<br />
Iancu Eugen,<br />
Cănureci Gabriela<br />
135. <strong>2008</strong> Maican Camelia,<br />
Vînătoru Matei,<br />
Cănureci Gabriela,<br />
Iancu Eugen<br />
136. <strong>2008</strong> Maican Camelia,<br />
Cănureci Gabriela,<br />
Vînătoru Matei,<br />
Iancu Eugen<br />
137. <strong>2008</strong> Cănureci Gabriela,<br />
Maican Camelia,<br />
Vînătoru Matei,<br />
Iancu Eugen<br />
138. <strong>2008</strong> Ionete Cosmin,<br />
Çela A.,<br />
Ben Gaid, M.E.M,<br />
Reama A.<br />
139. <strong>2008</strong> Roman Monica,<br />
Bobaşu Eugen,<br />
Fault Detection and Isolation Based on<br />
System Feedback<br />
Control System Simulator for Steam<br />
Boiler Parameters<br />
Lab Platform for the Steam<br />
Superheater Electronic Simulator<br />
Power and Frequency Control<br />
Systems Study<br />
Controllability and Observability of<br />
Linear Discrete-Time Systems with<br />
Network Induced Variable Delay<br />
Modeling of the Rotary Inverted<br />
Pendulum System<br />
Şendrescu Dorin<br />
140. <strong>2008</strong> Petre Emil Some Aspects Regarding the Chlorine<br />
Control in Drinking Water Distribution<br />
Networks<br />
141. <strong>2008</strong> Şendrescu Dorin,<br />
Marin Constantin,<br />
Petre Emil,<br />
Selişteanu Dan<br />
142. <strong>2008</strong> Răsvan Vladimir,<br />
Danciu Daniela,<br />
Popescu Dan<br />
143. <strong>2008</strong> Răsvan Vladimir,<br />
Danciu Daniela,<br />
Popescu Dan<br />
Identification of nonlinear Hammerstein<br />
models<br />
A unifying point of view in the problem<br />
of PIO – Pilot-In-the-loop Oscillations<br />
Diffusive Feedback, Dissipativeness<br />
and Synchronization of Coupled<br />
Oscillations<br />
Proceedings-AQTR <strong>2008</strong>, THETA 16 International Conference on<br />
Automation, Quality and Testing Robotics -Tome I, IEEE Catalog Nr.<br />
CFP08, ISBN 978-1-4244-2576-1<br />
Proceedings of the 12th WSEAS International Conference on Systems<br />
New Aspects of Systems, Part I, WSEAS Press<br />
ISBN 978-960-6766-83-1<br />
ISSN 1790-2769<br />
Proceedings of the 4th WSEAS /IASME International Conference on<br />
Dynamical Systems and Control, Control Systems, WSEAS Press,<br />
ISBN 978-960-474-014-7<br />
ISSN 1790-2769<br />
Proceedings of the 4th WSEAS /IASME International Conference on<br />
Dynamical Systems and Control, Control Systems, WSEAS Press,<br />
ISBN 978-960-474-014-7<br />
ISSN 1790-2769<br />
Proceedings of the 17th World Congress of the International<br />
Federation of Automatic Control, pp. 4216-4221, Seoul, Korea, July 6-<br />
11, <strong>2008</strong><br />
Proc. of the <strong>2008</strong> IEEE International Conference on Automation,<br />
Quality and Testing, Robotics (AQTR <strong>2008</strong>), THETA 16th edition, IEEE<br />
Catalog no. CFP08AQT-PRT, ISBN 978-1-4244-2576-1<br />
Proceedings of the 9th Int. Carpathian Control Conference ICCC <strong>2008</strong>,<br />
May 24-27, Sinaia, Romania, pp. 510-513, ISBN 978-973-746-897-0.<br />
Proceedings of the 9th Int. Carpathian Control Conference ICCC <strong>2008</strong>,<br />
May 24-27, Sinaia, Romania, pp. 599-602, ISBN 978-973-746-897-0.<br />
Proc. 5th Int. Conf. on Informatics in Control, Automatics and Robotics<br />
ICINCO<strong>2008</strong> 11-15 Mai <strong>2008</strong>, Madeira, Portugalia, pp. 200-204, ISBN<br />
978-989-8111-35-7 [ISI Proceedings, INSPEC, DBLP-Digital<br />
Bibliography and Library Project]<br />
18th Symposium on Mathematical Theory of Networks and Systerms<br />
MTNS <strong>2008</strong>, July 28 - August 1, <strong>2008</strong>, Virginia Tech, Blacksburg<br />
Virginia USA, CD-Rom, paper Mo-RSNetworks-5 (15p).<br />
77
144. <strong>2008</strong> Vinatoru Matei Level Control of Pumped-Storage<br />
Hydro Power Plants<br />
145. <strong>2008</strong> Canureci Gabriela,<br />
Vinatoru Matei,<br />
Maican Camelia,<br />
Iancu Eugen<br />
Faults digital library in burning process<br />
146. <strong>2008</strong> Vinatoru Matei Distributed Control of Hydropower<br />
Plant using Holonic Structure Concept<br />
147. <strong>2008</strong> Popa Cornelia,<br />
Craciun Aurel,<br />
Vladut Gabriel,<br />
Vinatoru Matei<br />
148. <strong>2008</strong> Anghelina Diana,<br />
Vinatoru Matei,<br />
Applicable Management System of<br />
Quality Parameters of Electrical<br />
Energy According with European<br />
Standards<br />
Testing and Analisys of Data<br />
Transmision Quality in Local Area<br />
Iancu Eugen<br />
Network,<br />
149. <strong>2008</strong> Matei Vinatoru Fault Detection in Hydropower Plant<br />
using Holonic Structure Concept<br />
150. <strong>2008</strong> Canureci Gabriela,<br />
Vinatoru Matei,<br />
Maican Camelia,<br />
Iancu Eugen<br />
151. <strong>2008</strong> Matei Vinatoru,<br />
Iancu Eugen,<br />
Cănureci Gabriela,<br />
Additive Faults' Detection and Level<br />
Control in Coupled Tanks<br />
Control System for Kaplan Hydro-<br />
Turbine<br />
Proceedings AQTR <strong>2008</strong>, IEEE International Conference on<br />
Automation, Quality and Testing Robotics -Tome II, ISBN 978-1-4244-<br />
2576-2,<br />
IEEE Catalog nr. CFP08AQT-PRT, Library of Congress <strong>2008</strong>904446<br />
Proceedings AQTR <strong>2008</strong>, IEEE International Conference on<br />
Automation, Quality and Testing Robotics -Tome I, ISBN 978-1-4244-<br />
2576-1,<br />
IEEE Catalog nr. CFP08AQT-PRT, Library of Congress <strong>2008</strong>904446<br />
Proceedings of ICCC <strong>2008</strong> 9th International Carpathian Control<br />
Conference, Sinaia Romania, <strong>2008</strong>, ISBN 978-973-746-897-0<br />
Proceedings of ICCC <strong>2008</strong> 9th International Carpathian Control<br />
Conference, Sinaia Romania, <strong>2008</strong>, ISBN 978-973-746-897-0<br />
Proceedings of ICCC <strong>2008</strong> 9th International Carpathian Control<br />
Conference, Sinaia Romania, <strong>2008</strong>, ISBN 978-973-746-897-0<br />
Vol. NEW ASPECTS OF SYSTEMS, Part I, 12th WSEAS International<br />
Conference on SYSTEMS, Heraklion, Crete Island, Greece, <strong>2008</strong>,<br />
WSEAS PRESS, ISBN 978-960-6766-83-1,<br />
ISSN 1790-2769<br />
Vol. NEW ASPECTS OF SYSTEMS, Part I, 12th WSEAS International<br />
Conference on SYSTEMS, Heraklion, Crete Island, Greece, <strong>2008</strong>,<br />
WSEAS PRESS, ISBN 978-960-6766-83-1,<br />
ISSN 1790-2769<br />
CONTROL SYSTEMS - Proceedings of The 4th WSEAS/IASME<br />
International Conference on Dynamical Systems and Control -<br />
CONTROL'08<br />
WSEAS Press <strong>2008</strong>, ISSN 1790- 2769, ISBN: 978-974--014-7<br />
Maican Camelia<br />
152. <strong>2008</strong> Cojocaru, D. Visualservoing for Tentacular Robots 4th WSEAS/IASME Intern. Conf. on Dynamical Syst. and Control<br />
(CONTROL'08), ISBN 978-960-474-014-7, ISSN 1790-2769, Plenary<br />
Lecture, Corfu, Greece, October 26-28, [ISI Proc., INSPEC].<br />
153. <strong>2008</strong> Cojocaru, D., Tanasie, T.R.,<br />
Ivanescu, M.<br />
154. <strong>2008</strong> Cojocaru, D., Tanasie, T.R.,<br />
Ivanescu, M.<br />
An Application for Generating, Deriving<br />
and Evaluating Mathematical<br />
Expressions<br />
Graphic Simulation for Camera<br />
Calibration in Visual-Servoing<br />
Application<br />
4th WSEAS/IASME International Conference on Dynamical Systems<br />
and Control (CONTROL'08), ISBN 978-960-474-014-7, ISSN 1790-<br />
2769, p187-192, Corfu, Greece, October 26-28, [ISI Proc., INSPEC]<br />
“NewAspects of Signal Processing, Computational Geometry and<br />
Artificial Vision”, Proceedings of the 8th WSEAS International<br />
Conference on Signal Processing, Computational Geometry and<br />
78
155. <strong>2008</strong> Cojocaru, D., Tanasie, T.R.,<br />
Ivanescu, M.<br />
156. <strong>2008</strong> Niculescu, M. C., Niculescu,<br />
E.<br />
Calibration Application for Real-Time<br />
Hyperredundant Robot’s Vision Control<br />
Improvements BER with Convolution<br />
Codes and Multilevel Coded<br />
Modulation<br />
157. <strong>2008</strong> M. C. Niculescu, I. Resceanu IP Security and Authentication on the<br />
Internet<br />
158. <strong>2008</strong> M. C. Niculescu and I.<br />
Resceanu<br />
159. <strong>2008</strong> Niculescu, M., Niculescu, E.,<br />
Resceanu, I.<br />
160. <strong>2008</strong> Pană Cristina, Resceanu I.<br />
C., Patrascu D. M.,<br />
161. <strong>2008</strong> Ionut Resceanu, Marius<br />
Niculescu, Cristina Pana<br />
162. <strong>2008</strong> Ionut RESCEANU, Marius<br />
Cristian NICULESCU<br />
163. <strong>2008</strong> Wireless Communication for<br />
Monitoring a Telerobotic<br />
System,<br />
Power Control of Wireless Network<br />
Interfaces<br />
Multiuser OFDM Using IP Mobile in<br />
VPNs and Security IP<br />
Fault-Tolerant Gaits of Quadruped<br />
Robot on a Constant-Slope Terrain<br />
Internet Comunication in Real Time<br />
Systems<br />
Using Model Predictive Control (MPC)<br />
for an Internet-based Mechatronic<br />
System<br />
Ionut Resceanu, Marius Niculescu,<br />
Cristina Pana<br />
Artificial Vision (ISCGAV'08), p.150-155, ISBN: 978-960-6766-95-4,<br />
ISSN: 1790-5109, August 20-22, Rhodes (Rodos) Island, Greece, [ISI<br />
Proc., INSPEC].<br />
Proceedings of the RAAD <strong>2008</strong> 17th International Workshop on<br />
Robotics in Alpe-Adria-Danube Region, ISBN 978-88-9037-0-8, paper<br />
no. 39, September 15-17, <strong>2008</strong>, Ancona, Italy<br />
Electronics & Communications (Proceedings of the 7th WSEAS<br />
International Conference on Electronics, Hardware, Wireless and<br />
Optical Communications, EHAC’08, University of Cambridge,<br />
Cambridge, UK, February 20 - 22, <strong>2008</strong>), pp. 133 – 139, WSEAS<br />
Press (Editors: L. Kazovsky, P. Borne et al.), <strong>2008</strong>; ISBN: 978-960-<br />
6766-40-4; ISSN: 1790 – 5117<br />
Proc. of the <strong>2008</strong> IEEE International Conference on Automation,<br />
Quality and Testing, Robotics, AQTR <strong>2008</strong> (Theta 16), May 22-28<br />
<strong>2008</strong>, Cluj-Napoca, pp. 71-76; ISBN: 978-973-713-248-2<br />
Advanced Topics on Applied Electromagnetics, Wireless and Optical<br />
Communications, Proceedings of the 6th WSEAS Int. Conf. on Applied<br />
Electromagnetics, Wireless and Optical Communications<br />
(ELECTROSCIENCE ‘08), Trondheim, Norway, July 2--4, <strong>2008</strong>,<br />
WSEAS Press, pp. 161 – 166, ISBN: 978-960-6766-79-4; ISSN 1790-<br />
5117<br />
New Aspects of Applied Informatics and Communications<br />
(Proceedings of the 8th WSEAS International Conference on Applied<br />
Informatics and Communications, AIC’08, Rhodes, Greece, August 20-<br />
22, <strong>2008</strong>), WSEAS Press, pp. 464 – 469; ISSN: 1790-5109; ISBN:<br />
978-960-6766-94-7<br />
AQTR <strong>2008</strong><br />
6th WSEAS Int. Conf. on APPLIED ELECTROMAGNETICS,<br />
WIRELESS and OPTICAL COMMUNICATIONS (ELECTROSCIENCE<br />
'08), ISSN: 1790-5117<br />
IEEE International Conference on Automation, Quality and Testing,<br />
Robotics AQTR <strong>2008</strong> - THETA 16th edition - May 22-25 <strong>2008</strong> Cluj-<br />
Napoca, Romania, ISBN: 978-973-713-248-2<br />
New Aspects of Applied Informatics and Communications, part 2, pag<br />
405-411, ISBN:978-960-6766-94-7, ISSN: 1790-5109<br />
79
164. <strong>2008</strong> Ionut Resceanu, Marius<br />
Niculescu, Nicu George<br />
Bizdoaca, Cristina Pana<br />
165. <strong>2008</strong> Pană Cristina Floriana,<br />
Resceanu I., Niculescu M.,<br />
Remote Monitoring and Diagnosis of a<br />
Mechatronic System<br />
Locomotion Of LEGGED Robot With<br />
Locked Joint<br />
New Aspects of Applied Informatics and Communications, part 2,<br />
ISBN:978-960-6766-94-7, ISSN: 1790-5109<br />
New Aspects of System Theory and Scientific Computation, Rodos,<br />
August <strong>2008</strong>, ISBN: 978-960-6766-96-1, ISSN: 1790-2769<br />
Pătraşcu D.M.,<br />
166. <strong>2008</strong> Niţulescu M. Experiments in mobile robot control Proceedings of 5th Europe – Asia Congress of Mecatronics and 7th<br />
France - Japan Congress of Mecatronics - MECATRONICS’<strong>2008</strong>, sub<br />
egida IEEE Institute of Electrical and Electronic Engineers, Universite<br />
Chambery – Annecy de Savoie, CNRS Centre National de la<br />
Recherche Scientifique GdR MACSde France, Kagawa University of<br />
Japan, Le Grand Bornand, France, May 20-21 <strong>2008</strong>, CD Proceedings<br />
Paper #200, Conference digest pp. 213.<br />
167. <strong>2008</strong> Niţulescu M., Stoian V.,<br />
Popescu D.<br />
168. <strong>2008</strong> Dinulescu I., Niţulescu M.,<br />
Popescu D., Predescu A.<br />
169. <strong>2008</strong> Model based Neural Control<br />
for a Robotic Leg<br />
170. <strong>2008</strong> Popescu Dorin, Selisteanu<br />
Dan, Dinulescu Ionut,<br />
Popescu Livia<br />
171. <strong>2008</strong> Popescu Dorin, Ivanescu<br />
Mircea, s.a<br />
172. <strong>2008</strong> Dinulescu Ionut, Popescu<br />
Dorin<br />
Developing models in wheeled mobile<br />
robotics to improve the navigation<br />
accuracy<br />
Monocular vision guided mobile robot<br />
localization<br />
Popescu Dorin, Selisteanu Dan,<br />
Popescu Livia<br />
Web based Telematics Application for<br />
Robotics<br />
A shared Resources Network<br />
Remote Learning Environment for<br />
Visual based Robot Navigation<br />
Proceedings of 9th International Carpathian Control Conference -<br />
ICCC’<strong>2008</strong>, University of Craiova - Romania, Technical University of<br />
Kosice - Slovak Republic, AGH University of Science and Technologiy<br />
- Cracow, Poland, VSB Technical University of Ostrava - Czech<br />
Republic and University of Miscolc - Hungary, May 25-28, <strong>2008</strong>,<br />
Sinaia, Romania, Editura SITECH Craiova, pp. 446-449, ISBN: 978-<br />
973-746-897-0.<br />
Proceedings of the 8th International Conference on Technical<br />
Informatics - CONTI’<strong>2008</strong>, “Politehnica” University of Timişoara,<br />
Faculty of Automation and Computers, Romania, June 5-6, <strong>2008</strong>,<br />
Timişoara, ROMANIA, Editura POLITEHNICA Timişoara, Vol. 1, pp.<br />
111-114, ISSN:1844 – 539X.<br />
Advanced Topics on Neural Networks, Artificial Intelligence Series,<br />
Proc. of the 9th WSEAS Intern. Conference on Neural Networks, Sofia,<br />
<strong>2008</strong>, pp. 136-141, ISSN 1790-5109. [Index ISI Proc., INSPEC]<br />
The IARIA Third International Multi-Conference on Computing in the<br />
Global Information Technology”, ICCGI <strong>2008</strong>, Atena, paper 267 [Index<br />
IEEE Xplore].<br />
19th EAEEIE Annual Conference on Innovation in Education for<br />
Electrical and Information Engineering, <strong>2008</strong>, Tallinn, Estonia. [index<br />
IEEE Xplore]<br />
19th EAEEIE Annual Conference on Innovation in Education for<br />
Electrical and Information Engineering, <strong>2008</strong>, Tallinn, Estonia. [index<br />
IEEE Xplore]<br />
80
173. <strong>2008</strong> Popescu Dorin, Selisteanu<br />
Dan, Dinulescu Ionut, Lazar<br />
Daniela<br />
174. <strong>2008</strong> Fei Li, Qing-Hao Meng,<br />
Shuang Bai, Ji-Gong Li,<br />
Development of online experiments for<br />
a mobile robot via Internet<br />
Probability-PSO Algorithm for Multi-<br />
Robot based Odor Source Localization<br />
in Ventilated Indoor Environments<br />
Dorin Popescu<br />
175. <strong>2008</strong> Niţulescu M. Theoretical aspects in wheeled mobile<br />
robot control<br />
176. <strong>2008</strong> Viorel Stoian, Cristina Pana Using Robotic Systems in a Smart<br />
House for People with Disabilities<br />
177. <strong>2008</strong> Bîzdoacă Nicu George,<br />
Petrişor Anca, Bîzdoacă<br />
Elvira, Diaconu Ilie<br />
178. <strong>2008</strong> Bîzdoacă Nicu George,<br />
Petrişor Anca, Bîzdoacă<br />
Elvira, Diaconu Ilie<br />
179. <strong>2008</strong> Nicu George Bîzdoacă, Dan<br />
Tarniţă, Daniela Tarniţă,<br />
Elvira Bîzdoacă<br />
180. <strong>2008</strong> Petrişor Anca, Bîzdoacă Nicu<br />
George, Drighiciu Adrian,<br />
Diaconu Ilie, Degeratu Sonia,<br />
Petrisor Raducu<br />
181. <strong>2008</strong> Degeratu Sonia, Bîzdoacă N.<br />
G., Manolea Gh., Diaconu I.,<br />
Petrisor Anca, DegeratuV.<br />
Modular Robotic System - A<br />
Concurrent Engineering Approch<br />
Modular Robotic System - A<br />
Concurrent Engineering Approch<br />
Application of smart materials: bionics<br />
modular adaptive implants<br />
Modeling and Simulation of Walking<br />
and Climbing Robots based on Stable<br />
States Transition Approach as Control<br />
Strategy<br />
Practical Aspects Regarding the<br />
Design of Intelligent Systems Using<br />
the Shape Memory Alloy Spring<br />
Proc. of 9th WSEAS Int. Conf. on Automation & Information (ICAI'08),<br />
Bucuresti, <strong>2008</strong>, pag. 519-524 [index INSPEC]<br />
Proc. of International Conference on Intelligent Robotics and<br />
Applications, Wuhan, China, <strong>2008</strong>. [index IEEE Xplore]<br />
Proceedings of <strong>2008</strong> IEEE - TTTC International Conference on<br />
Automation, Quality and Testing, Robotics – AQTR <strong>2008</strong> (THETA 16),<br />
Multimedia Session 2 "R-M1 Robotics", May, 22-25, <strong>2008</strong>, Tomul II,<br />
pp. 331-336, ISBN 978-1-4244-2576-1<br />
Proceedings of the 5th International Conference on Informatics in<br />
Control, Automation and Robotics (ICINCO-<strong>2008</strong>), INSTICC PRESS,<br />
Funchal, Madeira, Portugal, May 11-15, <strong>2008</strong>, Vol. 2, pp. 281-286,<br />
ISBN 978-989-8111-31-9.<br />
In Proceedings of the 10th WSEAS Int. Conf. on AUTOMATIC<br />
CONTROL, MODELLING & SIMULATION (ACMOS'08), Istanbul,<br />
Turkey, May 27-30, <strong>2008</strong>, pp.417-421, ISBN:960-6766-63-3, ISSN:<br />
1790-5117, baza de date Bibliography of publications of The World<br />
Scientific and Engineering Academy and Society (WSEAS)<br />
In Proceedings of the 10th WSEAS Int. Conf. on AUTOMATIC<br />
CONTROL, MODELLING & SIMULATION (ACMOS'08), Istanbul,<br />
Turkey, May 27-30, <strong>2008</strong>, pp.417-421, ISBN:960-6766-63-3, ISSN:<br />
1790-5117, baza de date Bibliography of publications of The World<br />
Scientific and Engineering Academy and Society (WSEAS)<br />
Advances in Mobile Robotics, (Proceedings of the Eleventh<br />
International Conference on Climbing and Walking Robots – CLAWAR<br />
<strong>2008</strong>) ISBN-13 978-981-283-576-5ISBN-10 981-283-576-8 World<br />
Scientific Publishing Co.Pte.Ltd pag 190-198 – lucrare premiată cu The<br />
Industrial Robot Innovation Award <strong>2008</strong> Highly Commended,<br />
In Proceedings of the 12th WSEAS International Conference on<br />
SYSTEMS, Heraklion, Greece, July 22-24, <strong>2008</strong>, pp.216-221, ISBN:<br />
978-960-6766-83-1, ISSN: 1790-2769 - baza de date Bibliography of<br />
publications of The World Scientific and Engineering Academy and<br />
Society (WSEAS)<br />
In Proceedings of the 12th WSEAS International Conference on<br />
EMESEG, <strong>2008</strong>, Heraklion, Crete, Greece, July 22-24, ISSN 1790-<br />
2769, 978-960-6766-88-6, pp. 226-231 - baza de date Bibliography of<br />
publications of The World Scientific and Engineering Academy and<br />
81
182. <strong>2008</strong> Tarnita, D., Popa D., Tarnita<br />
D.N., Bîzdoacă, N., Adam, Dr<br />
183. <strong>2008</strong> Petrisor Anca, Bîzdoacă Nicu<br />
George, s.a<br />
184. <strong>2008</strong> Bîzdoacă Nicu George,<br />
Petrisor Anca, s.a<br />
185. <strong>2008</strong> Degeratu S., Petre Rotaru,<br />
Manolea Gh, Petrisor Anca,<br />
Bîzdoacă N<br />
186. <strong>2008</strong> Tarnita, D.; Tarnita, D.;<br />
Bîzdoacă, N.; Negru, M.;<br />
Copilus, C.<br />
187. <strong>2008</strong> Bîzdoacă Nicu George,<br />
Petrişor Anca, Bîzdoacă<br />
Elvira, Diaconu Ilie<br />
188. <strong>2008</strong> Bîzdoacă Nicu George,<br />
Tarnita D, Tarnita DN,<br />
Degeratu S.<br />
189. <strong>2008</strong> Vladu C. , Bîzdoacă N. G.,<br />
Cojocaru D.<br />
190. <strong>2008</strong> Tarnita, D., Tarnita D.N.,<br />
Bîzdoacă, N., Cismaru Fl.<br />
191. <strong>2008</strong> Tarnita, D., Tarnita D.N.,<br />
Bîzdoacă, N.<br />
192. <strong>2008</strong> Tarnita, D., Tarnita D.N.,<br />
Bîzdoacă, N., Mogoanta, L.<br />
193. <strong>2008</strong> Tarnita, D., Tarnita D.N.,<br />
Bîzdoacă, N., Mogoanta, L.<br />
Contributions on the dynamic<br />
simulation of the virtual model of the<br />
human knee joint<br />
Stable States Transition Approach - a<br />
new strategy for walking robots control<br />
in uncertain environments<br />
Shape memory alloy tendons actuated<br />
tentacle robotic structure - models and<br />
control<br />
Visual basic applications for shape<br />
memory elements design used in<br />
intelligent systems<br />
Modular Orthopedic Implants for<br />
Forearm Bones Based on Shape<br />
Memory Alloys<br />
A new aspect of the robot modularity<br />
concept<br />
Smart materials bionics modular<br />
adaptive implant<br />
Soft actuator with magnetorheological<br />
valve-stop<br />
Aplicaţii medicale bazate pe materiale<br />
inteligente<br />
Aplicatii ale unor materiale cu memoria<br />
formei in medicina<br />
Medical shape memory alloy<br />
applications<br />
Simulation of fractures for forearm<br />
bones using Finite Element Method<br />
Society (WSEAS)<br />
10th International Symposium “Biomaterials and Biomechanics”, <strong>2008</strong>,<br />
Essen, Germania<br />
ISI Proceedings of the 4th International Conference on Informatics in<br />
Control, Automation and Robotics, ICINCO’08, 11-15 May, <strong>2008</strong>,<br />
Funchal, Madeira, Portugal, Volume RA 1, pp. 202-207, ISBN 978-<br />
989-8111-31-9 (http://scientific.thomson.com/products/proceedings/).<br />
ISI Proceedings of the 4th International Conference on Informatics in<br />
Control, Automation and Robotics, ICINCO’08 11-15 May, <strong>2008</strong>,<br />
Funchal, Madeira, Portugal, Volume RA 2, pp. 77-80, ISBN 978-989-<br />
8111-31-9. http://scientific.thomson.com/products/proceedings/).<br />
ISI Proceedings of the 4th International Conference on Informatics in<br />
Control, Automation and Robotics, ICINCO’08,11-15 May, <strong>2008</strong>,<br />
Funchal, Madeira, Portugal, Volume RA 2, pp.207-210, ISBN 978-<br />
989-8111-31-9 (http://scientific.thomson.com/products/proceedings/).<br />
The 19th DAAAM International Symposium "Intelligent Manufacturing<br />
& Automation", Slovak University of Technology Faculty of Materials<br />
Science and Technology in Trnava, Trnava, Slovakia, 22-25th October<br />
<strong>2008</strong><br />
9th International Carpathian Control Conference, ICCC’<strong>2008</strong>, Sinaia,<br />
Romania, 25-28 mai, <strong>2008</strong>, pp. 51-54, ISBN 978-973-746-897-0.<br />
9th International Carpathian Control Conference, ICCC’<strong>2008</strong>, Sinaia,<br />
Romania, 25-28 mai, <strong>2008</strong>, pp. 55-594, ISBN 978-973-746-897-0.<br />
9th International Carpathian Control Conference, ICCC’<strong>2008</strong>, Sinaia,<br />
Romania, 25-28 mai, <strong>2008</strong>, pp. 711-715, ISBN 978-973-746-897-0.<br />
Al III-lea Seminar National de Teoria Mecanismelor, Craiova, sept.<br />
<strong>2008</strong>.<br />
International Workshop on Intelligent Materials, Craiova, <strong>2008</strong>.<br />
Congres International de Histologie, Craiova, mai, <strong>2008</strong>.<br />
Congres International de Histologie, Craiova, mai, <strong>2008</strong>.<br />
82
194. <strong>2008</strong> Bîzdoacă, N., Tarnita, D.,<br />
Tarnita, D. N.<br />
195. <strong>2008</strong> Bîzdoacă N.G., Dorin<br />
Popescu, Elvira Bîzdoacă<br />
196. <strong>2008</strong> Bîzdoacă N.G, Anca Petrisor,<br />
Elvira Bîzdoacă, Ilie Diaconu<br />
Histological approach in design of a<br />
modular adaptive implant based on<br />
smart material<br />
Concepts and studies concerning<br />
curricular adaptability of education in<br />
the mechatronics and robotics domain,<br />
to national and regional particularities<br />
Experiments with modular structure<br />
robot<br />
Congres International de Histologie, Craiova, mai, <strong>2008</strong>.<br />
A 4-a Conferinta Internationala de Robotica – ROBOTICA’08, sub<br />
egida Universitatii Transilvania din Brasov si Societatea de Robotica<br />
din Romania, November 13-14, <strong>2008</strong>, Brasov, Romania<br />
A 4-a Conferinta Internationala de Robotica – ROBOTICA’08, sub<br />
egida Universitatii Transilvania din Brasov si Societatea de Robotica<br />
din Romania, November 13-14, <strong>2008</strong>, Brasov, Romania<br />
Membri in colectivele de redactie ale unor reviste cotate ISI sau incluse in baze de date recunoscute<br />
1. <strong>2006</strong> Rasvan Vladimir Revista cotata ISI European Journal of Control, ISSN 1417-3875<br />
2. <strong>2006</strong> Rasvan Vladimir Revista inclusa in baze de date<br />
Rev.Roumaine Sci Techn. Electrotechn Energ (INSPEC)<br />
internationale, altele decat ISI<br />
3. <strong>2006</strong> Popescu Dan Revista cotata ISI IEEE Trans. Autom. Contr. (ISI)<br />
4. <strong>2006</strong> Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
5. <strong>2006</strong> Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
6. <strong>2006</strong> Danciu Daniela Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
7. 2007 Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
8. 2007 Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
WSEAS Transactions on Information Science and<br />
Applications, ISSN 1790-0832<br />
WSEAS Transactions on Computers, ISSN 1109-2750<br />
Physics Letter A<br />
WSEAS Transactions on Information Science and<br />
Applications, ISSN 1790-0832<br />
WSEAS Transactions on Computers, ISSN 1109-2750<br />
9. 2007 Popescu Dan Revista cotata ISI IEEE Transactions on Automatic Control<br />
10. 2007 Rasvan Vladimir Revista cotata ISI Rev.Roumaine Sci Techn. Electrotechn Energ (INSPEC)<br />
11. <strong>2008</strong> Rasvan Vladimir Revista cotata ISI Rev.Roumaine Sci Techn. Electrotechn Energ<br />
12. <strong>2008</strong> Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
WSEAS Transactions on Information Science and<br />
Applications, ISSN 1790-0832<br />
83
13. <strong>2008</strong> Cojocaru Dorian Revista inclusa in baze de date<br />
internationale, altele decat ISI<br />
WSEAS Transactions on Computers, ISSN 1109-2750<br />
Membrii in colectivele de redactie ale unor reviste recunoscute pe plan national<br />
1. <strong>2006</strong> Rasvan Vladimir Control Engineering and Appl. Informatics<br />
2. 2007 Rasvan Vladimir Control Engineering and Appl. Informatics<br />
3. <strong>2008</strong> Rasvan Vladimir Control Engineering and Appl. Informatics<br />
Premii internationale<br />
1. 2007 Popescu Dan International Best Paper’s Author – pentru lucrarea „Robust Control Methods Applied to a Flexible Beam<br />
Quanser Experiment”, prezentată la International Carpathian Control Conference 2007,<br />
Strbske Pleso, Slovacia, 24-27 mai, 2007<br />
84