Experimentella metoder - Atomic Physics!
Experimentella metoder - Atomic Physics!
Experimentella metoder - Atomic Physics!

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
.<br />
Experimentell metodik<br />
Laboration 1 Produktansatser och linjärisering<br />
Du skall bestämma vilka faktorer, som påverkar svängningstiden för<br />
antingen en konsolbalk eller en fjäder, och Du skall ta fram ett allmängiltigt<br />
analytiskt uttryck för svängningstidens beroende av de olika variablerna.<br />
Du får tillgång till en enkel mätutrustning. För att kunna lösa uppgiften<br />
kommer Du att utnyttja mätningar, linjärisering, dimensionsanalys och<br />
diagramritning.<br />
Redogörelse<br />
Den skriftliga redovisningen kan vara kort och behöver enbart innehålla Dina<br />
beräkningar, diagram och resultat.<br />
Förberedelser<br />
Utför förberedelseuppgifterna till "Experimentell metodik". Lämna lösningar<br />
till handledaren i samband med laborationen.<br />
Läs följande avsnitt i "Appendix 1 och 2" om:<br />
Dimensioner, sid 36 – 42<br />
Linjära samband, sid 45 - 46<br />
Linjärisering, sid 47 - 51<br />
Läs i kompendiet "Börja med MatLab, 2005" om:<br />
Grafik, sid 19-21<br />
Räta linjens ekvation, sid 38<br />
Linjärisering, sid 39 - 40<br />
Förberedelseuppgifter<br />
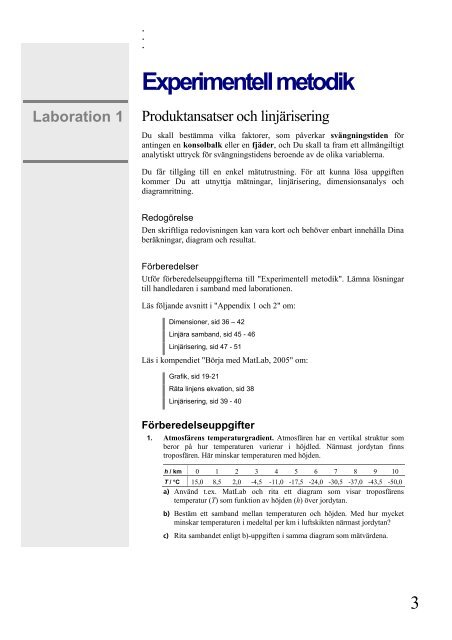
1.<br />
Atmosfärens temperaturgradient. Atmosfären har en vertikal struktur som<br />
beror på hur temperaturen varierar i höjdled. Närmast jordytan finns<br />
troposfären. Här minskar temperaturen med höjden.<br />
h / km 0 1 2 3 4 5 6 7 8 9 10<br />
T / °C 15,0 8,5 2,0 -4,5 -11,0 -17,5 -24,0 -30,5 -37,0 -43,5 -50,0<br />
a) Använd t.ex. MatLab och rita ett diagram som visar troposfärens<br />
temperatur (T) som funktion av höjden (h) över jordytan.<br />
b)<br />
c)<br />
Bestäm ett samband mellan temperaturen och höjden. Med hur mycket<br />
minskar temperaturen i medeltal per km i luftskikten närmast jordytan?<br />
Rita sambandet enligt b)-uppgiften i samma diagram som mätvärdena.<br />
3
Laboration Experimentell metodik<br />
2.<br />
Glödlampa. I tabellen nedan finns mätvärden som anger belysningen (E) som<br />
funktion av avståndet från en glödlampa (r) .<br />
r / m<br />
2,0 1,8 1,5 1,3 1,0<br />
E / lux 162 200 288 383 648<br />
Tabell 1 Stegfrekvensen (f) och<br />
a) Använd t.ex. MatLab och rita ett diagram som visar belysningen (E) som<br />
funktion av avståndet (r) från lampan.<br />
mankhöjden (h) för några däggdjur<br />
från den Afrikanska savannen<br />
b) Bestäm ett samband mellan belysningen och avståndet.<br />
Djur h / m f / Hz<br />
c) Rita sambandet enligt b)-uppgiften i samma diagram som mätvärdena.<br />
3. Naturlig stegfrekvens. De engelska zoologerna Alexander och Jayes (1983)<br />
Gazell<br />
Vårtsvin<br />
Gnu (kalv)<br />
Antilop<br />
Lejon<br />
Zebra<br />
Gnu (vuxen)<br />
Noshörning<br />
Giraff<br />
0,60<br />
0,62<br />
0,65<br />
0,81<br />
0,88<br />
1,15<br />
1,18<br />
1,41<br />
2,65<br />
1,24<br />
1,28<br />
1,10<br />
0,96<br />
0,81<br />
0,88<br />
0,86<br />
0,67<br />
0,49<br />
antog att alla djur som går borde kunna betraktas som en "omvänd pendel",<br />
med kroppen som kläpp, benet som pendelarm och fotens anläggningspunkt<br />
mot jorden som rotationspunkt. Varje steg innebär då att pendeln först<br />
genomlöper en halv svängningscykel genom att kroppen flyttas framåt. Sedan<br />
fullbordas cykeln genom att rotationspunkten förflyttas när foten lyfts från<br />
marken och flyttas framåt. Om detta är en riktig hypotes, borde djur välja en<br />
naturlig stegfrekvens när de vill gå på ett så energisnålt sätt som möjligt.<br />
Stegfrekvensen borde skala med djurets storlek i enighet med<br />
Elefant 3,10 0,51 egenfrekvensen (f ) för pendeln f ∝<br />
L är pendelns längd.<br />
g L , där g är tyngdaccelerationen och<br />
Pendeln har en intressant egenskap som bygger på energiminimering. För att<br />
få pendeln att svänga med antingen en större eller mindre frekvens än f, dvs.<br />
om djuret av någon anledning måste gå fortare än vad den naturliga<br />
steglängden medger, krävs ett tillskott av energi.<br />
b<br />
L<br />
Utgå från mätvärdena i tabellen och pröva Alexander och Jayes hypotes.<br />
Figur 1 Vinglängden (L) och<br />
4. Flygning. Ett flygplan rör sig med farten v genom luft med densiteten ρ.<br />
vingbredden (b) hos ett flygplan. a) Sök ett uttryck för lyftkraften (F) i förhållande till den totala vinglängden<br />
(L), dvs. Φ = F/L om flygplanets vingar har bredden b.<br />
ΔL<br />
ΔL<br />
m<br />
1/A<br />
Figur 2 Ståltrådens förlängning (∆L)<br />
som funktion av massan (m) och<br />
tvärsnittsarean (A).<br />
4<br />
5.<br />
Svar<br />
b)<br />
En Boeing 747 väger ungefär 148·10 3 kg och har en vingarea på ca 280 m 2 .<br />
På höjden 35 000 feet (10 700 m) är luftens densitet ca 0,37 kg/m 3 och<br />
flyghastigheten ca 250 m/s. Beräkna lyftkraften och bestäm sedan ett<br />
fullständigt uttryck för lyftkraften (F).<br />
Elasticitet . En tunn ståltråd har längden L0,<br />
då den är obelastad. Då vi hänger<br />
en vikt med massan m i ena änden, ökar ståltrådens längd till L. Hitta ett<br />
uttryck för längdändringen ΔL = (L – L0)? Trådens tvärsnittsarea är A och dess<br />
elasticitetsmodul 1 E. Utnyttja diagrammen bredvid för att fullfölja sambandet.<br />
1b) T = -6,5·h + 15,0. Temperaturen minskar med 6,5°C för varje km.<br />
2b) E = 648·r -2<br />
3 Hypotesen verkar rimlig.<br />
4a) φ = k·b·v 2 ·ρ , där k är en dimensionslös konstant.<br />
4b) F = 0,22·b·L·v 2 ·ρ.<br />
5 ΔL = k·L 0·m·g/(E·A), där k är en dimensionslös konstant.<br />
1 Elasticitetsmodulen är en materialkonstant som anger hur materialet beter sig<br />
vid en belastning. Den definieras (1/E) ∝ -(1/L)·(dL/dp), där L är längden och p<br />
kraft per areaenhet. Elasticitetsmodulen är således det inverterade värdet av<br />
kvoten mellan den relativa längdförändringen och tryckförändringen (med<br />
ombytt tecken).
Laborationsuppgifter<br />
Du ska utföra en av de båda uppgifterna på de följande sidorna.<br />
Under arbetets gång kommer Du snabbt underfund med att det inte alltid går<br />
att ändra en variabel i taget. Du kan emellertid få fram samband även om Du<br />
ändrar flera variabler samtidigt. I praktiken är samtidig variation av olika<br />
parametrar mer regel än undantag.<br />
Arbeta så systematiskt Du kan, gör dimensionsanalyser, ta upp samband,<br />
analysera diagram, ge inte upp om Du hamnar i ett blindspår. Ta det som en<br />
utmaning! Var beredd på att handledaren inte alltid ger Dig hela svar utan<br />
bara små ledtrådar. Att fråga kamrater går naturligtvis, men då missar Du<br />
chansen att själv knäcka uppgiften.<br />
Laborationen avslutas med att Du gör ett enda diagram över den mätta<br />
svängningstiden som funktion av samtliga variabler (alla mätpunkter kommer<br />
här till användning). Eventuella dimensionslösa konstanter bestämmer Du<br />
med hjälp av detta diagram.<br />
Svängande stavar<br />
En stav som är fastspänd i ena kortsidan sätts i svängning. Din uppgift är att<br />
undersöka vilka faktorer som påverkar svängningstiden för en svängande stav.<br />
Du skall redovisa ett analytiskt samband som gäller för en godtycklig,<br />
fastspänd stav.<br />
I redovisningen ska det finnas med ett diagram där svängningstiden är ritad<br />
som funktion av hela det analytiska sambandet. Värden från samtliga stavar<br />
ska finnas med i diagrammet. Figur 3 Svängande stav.<br />
Stavuppsättningen framgår av sammanställningen nedan.<br />
Utrustning:<br />
Tidmätningsutrustning<br />
Måttband<br />
Skjutmått<br />
Bänk för inspänning av stavar<br />
Stavar enligt Tabell 2<br />
Tabell 2 Stavar, mått i mm.<br />
Järn Aluminium Mässing<br />
25x5 30x5 40x8<br />
14x3<br />
40x8<br />
40x6<br />
30x5<br />
25x6<br />
25x3<br />
25x8<br />
5
Laboration Experimentell metodik<br />
6<br />
Figur 4 Svängande fjäder.<br />
Svängande fjädrar<br />
En i ena änden fastspänd fjäder belastas med en vikt och sätts i svängning.<br />
Din uppgift är att undersöka hur olika faktorer påverkar svängningstiden för<br />
systemet. Du skall redovisa ett analytiskt samband som gäller för en<br />
godtycklig fjäder med godtycklig belastning.<br />
I redovisningen ska det finnas ett diagram där Du ritar svängningstiden som<br />
funktion av hela det analytiska sambandet. Värden från samtliga fjädrar skall<br />
finnas med i diagrammet.<br />
Fjäderuppsättningen framgår av sammanställningen nedan.<br />
Utrustning:<br />
Stativ för upphängning av fjädrar<br />
Tidmätningsutrustning<br />
Vikter (0,50 kg och 1,00 kg)<br />
Skjutmått<br />
Tabell 3 Fjädrar<br />
Diameter /<br />
mm<br />
Upphängningsanordning för vikter (0,50 kg)<br />
Fjädrar av stål enligt Tabell 3:<br />
Antal<br />
varv<br />
35 3 13<br />
60 3 7<br />
60 3 7<br />
35 4 14<br />
40 4 10<br />
50 4 15<br />
60 4 12<br />
60 5 9<br />
60 5 9<br />
60 5 12<br />
60 5 17<br />
60 6 16<br />
Tråddiameter / mm
Appendix 1<br />
.<br />
Enheter och dimensioner<br />
Hitta samband<br />
Storheter, enheter och dimensioner hänger ihop på ett fundamentalt sätt. Att<br />
en sträcka har dimensionen längd är betydligt mer fundamentalt än att den<br />
mäts i enheten en meter. Olika längdenheter kan jämföras med och<br />
omvandlas i varandra. Olika dimensioner är däremot inte jämförbara.<br />
Storheten “volym” har t.ex. dimensionen (längd) 3 och kan inte jämföras med<br />
eller omvandlas i något som har dimensionen (längd) 1 . Notera dock att vi ofta<br />
anger storleken av en storhet med en dimension genom att ange mätetalet för<br />
en annan dimension. Exempelvis kan vi jämföra volymen (V) av 2 sfärer<br />
genom att jämföra deras radier (r), eftersom (V1/V2) = (r1/r2) 3 .<br />
Naturen har försett oss med några fundamentala dimensioner. Storleken måste<br />
vi uttrycka i någon enhet som vi själva väljer. Avståndet "härifrån" till "dit"<br />
finns oberoende av om vi mäter det eller inte. Avståndet beror inte heller på<br />
om vi väljer att mäta det med långa eller korta steg, med ett måttband eller<br />
med laserteknik. Visserligen kan någon mätmetod vara bättre än andra - men<br />
mätmetoden, enheten osv. påverkar inte avståndet. Vi väljer själva vilken<br />
mätmetod eller enhet vi vill använda, däremot kan vi inte välja vilken<br />
dimension det vi mäter har - dimensionerna finns vare sig vi vill eller ej.<br />
Exempelvis har storheten “jordens radie” dimensionen längd. Om vi mäter<br />
denna storhet kan resultatet bli 6357 km. Storhetsvärdet 6357 kallas mätetal<br />
och måttstocken 1 km kallas enhet. Mellan storheter med samma dimension<br />
använder vi omvandlingsfaktorer om vi vill uttrycka storheten i en annan<br />
enhet.<br />
I det här avsnittet skall vi inleda med en diskussion om enheter för att sedan i<br />
huvudsak ägna oss åt hur dimensionsbegreppet kan användas för att<br />
kontrollera eller härleda samband och i största allmänhet vara ett verktyg och<br />
stöd för alla naturvetare och tekniker.<br />
27
Appendix 1 Enheter och dimensioner<br />
Figur 1 Kölber beskriver i sin bok<br />
"Geometri" från 1584 hur enheten "en<br />
fot" kan kalibreras varje söndag. 16<br />
stora och små män skulle ställa sig i<br />
rad med skorna framför varandra. En<br />
slags tidig medelvärdesbildning med<br />
Enheter<br />
Läran om mätningar kallas metrologi 1 . Metrologin har status som en egen<br />
vetenskap och lägger grunden för all naturvetenskap och teknik. Att mäta är<br />
att jämföra 2 storhetsvärden med varandra. Det storhetsmått som vi använder<br />
som jämförelsevärde kallar vi för enhet. Enheten är ett storhetsvärde vars<br />
mätetal är lika med ett. T.ex. är SI-enheten för storheten massa 1 kg.<br />
Enheter/enhetssystem är viktiga, eftersom enheterna t.ex sätter gränsen för<br />
mätnoggrannheten, påverkar vad och hur vi kan mäta. Det finns många sätt att<br />
bygga upp ett enhetssystem, t.ex. kan vi välja:<br />
en oberoende enhet för varje storhet.<br />
ett mindre antal grundenheter, för ett mindre antal grundstorheter. Vi<br />
härleder sedan alla andra enheter med hjälp av storhetsekvationer.<br />
att inte ha några enheter alls och uttrycka alla storheter som<br />
kombinationer av fysikaliska konstanter.<br />
För att ett enhetssystem skall kunna fungera i praktiken måste vi kunna<br />
absolutbestämma enheterna med precision, noggrannhet och<br />
reproducerbarhet vid olika tidpunkter och i olika laboratorier.<br />
Genom att vi kalibrerar 2 våra normaler mot andra, som vi vet är<br />
noggrannare, får vi tillgång till en egen enhet. En kedja av sådana jämförelser<br />
leder så småningom till en direkt jämförelse med den riktiga enheten.<br />
Kalibrering är en gammal företeelse, exempelvis kan vi i boken "Geometri"<br />
av Kölber från 1584 läsa hur enheten "en fot" skulle kalibreras:<br />
andra ord. "16 män, stora och små, vid kyrkbesök ska ställa sig på rad med<br />
skorna framför varandra, så att den rätta måttstocken kan fastställas".<br />
28<br />
SI-systemet<br />
Vi föredrar ett universellt enhetssystem med en teoretisk anknytning, där<br />
enheternas storlek går att bestämma med stor precision. Mot denna bakgrund<br />
föreslog den italienske fysikern Giovanni Giorgi ett enhetssystem baserat på<br />
bl.a. grundenheterna en meter, ett kilogram och en sekund. År 1948 togs<br />
principerna upp i internationella organ under arbetsnamnet "Giorgisystemet".<br />
Först 1954 hade vi utformat ett nytt enhetssystem som vi 1960 fastställde med<br />
namnet Systéme International d’Unités (SI). Systemet är uppbyggt kring<br />
de tre begreppen<br />
en fysikalisk storhet är ett uttryck eller egenskap hos ett föremål<br />
eller företeelse som vi kan mäta eller beräkna.<br />
enhet - ett jämförelsevärde av storheten.<br />
mätetal - anger hur många gånger den valda enheten innehålls i<br />
storheten.<br />
Varje storhet är oberoende av vilken enhet som väljs. Däremot är mätetalet<br />
beroende av den valda enheten. För att kunna skilja dessa åt har vi infört ett<br />
beteckningssystem 3 : mätetalet för storheten Q betecknas {Q} och enheten<br />
1 Latin: “met” – mäta och grekiska: “logi” - läran om.<br />
2 Arabiska: “qalib” - skomakarens läst.<br />
3 Svensk standard SS 01 61 18: Storheter och enheter - allmänna principer och skrivregler.
[Q]. Vi kan då ange värdet av storheten Q som ett mätetal multiplicerat med<br />
en enhet och skriva<br />
{ Q}<br />
[ Q]<br />
Q ⋅<br />
= (5.1)<br />
Då vi ska ange att en viss massa (m) är 17 kg ska vi skriva m = 17 kg. Om<br />
mätetalet är okänt bör vi tilldela detta en beteckning som är en annan än dess<br />
storhetsbeteckning, dvs. det är fel att skriva m = m·kg men rätt att skriva<br />
m = x·kg. “Enheten för massa” skriver vi på följande vis:<br />
[ m]<br />
= 1⋅ kg<br />
Vi kan då uppfatta fysikaliska formler som ett samband mellan storheter.<br />
Kraftekvationen lyder exempelvis F = k·m·a, där kraften (F), massan (m) och<br />
accelerationen (a) är storheter och k är en enhetslös konstant.<br />
I SI-systemet har vi definierat ett mindre antal grundenheter, i vilka vi<br />
uttrycker systemets alla övriga enheter, Tabell 1 4 . I SI-systemet finns det<br />
också två supplementenheter 5 (Tabell 2). Utifrån dessa definitioner kan vi<br />
avstämma härledda enheter. För att härleda en enhet utgår vi från en<br />
fysikalisk formel i vilken motsvarande storhet ingår. Enheterna för samtliga<br />
övriga storheter, som ingår i formeln, måste vara fastlagda, antingen som<br />
grundenheter eller som tidigare härledda enheter. De härledda enheterna<br />
avstämmer vi sedan genom att fastställa proportionalitetskonstanternas<br />
värden. Dessa konstanter sätter vi ofta, men inte alltid till 1.<br />
En härledd enhet är bildad som en potens (eller en produkt av potenser) av<br />
grund- och supplementenheter enligt fysikaliska lagar (se 0). 19 härledda SIenheter<br />
har givits egna namn 6 . Härledda enheter skall skrivas så att de inte<br />
kan missförstås (se 0). Således bör vi undvika dubbla bråkstreck och produkt<br />
efter divisionstecken. I tveksamma fall skall vi använda parenteser.<br />
Det finns all anledning att utnyttja de s.k. multipelenheterna då vi anger<br />
stora och små tal. Flera språk använder nämligen samma ord för olika<br />
storlekar. I Tabell 3 jämförs svenska, tyska, amerikanska och brittiska<br />
vardagliga ord som t.ex. "one billion", vilket för en amerikan betyder 10 9<br />
medan det för en svensk, tysk och britt betyder 10 12 .<br />
Multipelenheter bildas som vissa tiopotenser av SI-enheter. Motsvarande<br />
benämning får vi genom att sätta prefix (se Tabell 4) framför den aktuella<br />
enhetsbeteckningen. Då prefixen skulle namnges började vi med att utnyttja<br />
grekiska ord för multiplar (10 1 , 10 2 , 10 3 , 10 6 , …) och latinska ord för<br />
bråkdelar (10 –1 , 10 -2 , 10 -3 , 10 -6 , …). Men grekerna hade inget räkneord för<br />
någonting större än tiotusen och romarna hade inget för större än tusen. Vi<br />
tillgrep då lite mindre exakta ord från grekiskan och slutligen utnyttjade vi<br />
även spanskan och de nordiska språken.<br />
(5.2)<br />
4<br />
Enheten i celciustemperaturskalan 1°C är lika med 1 K. De båda skalorna skiljer sig bara i<br />
valet av nollpunkt, så att 0°C = 273,15 K. Definitionen av den termodynamiska<br />
temperaturen är: “En kelvin, är bråkdelen 1/273,16 av den termodynamiska temperaturen<br />
vid vattnets trippelpunkt”.<br />
5<br />
Vid numeriska beräkningar skall supplementenheterna 1 rad och 1 sr sättas lika med 1<br />
(ett).<br />
6<br />
De härledda enheterna med eget namn är: 1 Hz, 1 N, 1 Pa, 1 J, 1 W, 1 C, 1 V, 1 F, 1 Ω,<br />
1 S, 1 Wb, 1 T, 1 H, 1 °C, 1 lm, 1 lx, 1 Bq, 1 Gy samt 1 Sv.<br />
© Nina Reistad 2005 29
Appendix 1 Enheter och dimensioner<br />
30<br />
Enhetssystem<br />
Då vi skriver ett tal måste vi dels hålla reda på själva siffrorna och dels<br />
siffrornas decimalposition. Det är korrekt att säga att ljusets hastighet i<br />
vakuum är c = 299792000 m/s. Det är också korrekt och bättre att säga att<br />
c = 2,99792·10 8 m/s, eftersom det senare skrivsättet är lättare att förstå.<br />
Eftersom de större prefixen är potenser av 3, bör vi använda 10 ±3 , 10 ±6 , 10 ±9 ,<br />
… Vi ska med andra ord skriva 5,98·10 24 kg istället för 59,8·10 23 kg.<br />
En storhetsekvation kan skrivas om i en enhetsekvation. Detta kan<br />
utnyttjas dels för att kontrollera samband och dels för att omvandla enheter.<br />
Tabell 1 SI-systemets grundenheter<br />
Vi har skapat enheter efterhand som vi har haft behov av att<br />
mäta. Ursprungligen knöt vi enheterna till vardagliga<br />
företeelser och kopplade inte ihop dem med varandra.<br />
Areaenheten kunde vara den areal som motsvarade en<br />
tunna utsäde (tunnland). Enheten för längd t.ex. 3 havrekorn<br />
i rad (amerikansk inch) eller storleken av en kroppsdel: en<br />
fot, bredden av en hand eller längden av en tumme. Bruket<br />
av kroppsdelar fanns redan i den gamla egyptiska kulturen.<br />
Gammal egyptisk beskrivning av längdenheter.<br />
Kungens näsa<br />
Följden var ett stort antal olika enheter för samma storhet<br />
och eftersom människor varierar i storlek var enheterna inte<br />
väldefinierade. Ett tidigt försök att åstadkomma en<br />
"riksnormal" är den engelska "yarden" som år 1101<br />
definierades som<br />
"… avståndet mellan kung Henriks nässpets och det<br />
mellersta fingret när kungen höll armen utsträckt".<br />
De tidiga enheterna var varken enhetliga eller beständiga<br />
och mångfalden orsakade (och orsakar)<br />
kommunikationsproblem. T.ex. är "en metrisk hästkraft"<br />
detsamma som 735 W medan "one horsepower" (USA och<br />
UK) motsvarar 745 W. Vi svenskar köper bensin i enheten<br />
"en liter", engelsmännen och amerikanarna gör det i enheten<br />
"en gallon" som i UK betyder 4,5461 och i USA 3,7854 .<br />
Samma förvirring inträder om vi beställer "en pint" öl. Då får<br />
vi 0,56825 i en engelsk pub medan den amerikanska<br />
salongen serverar 0,55060 .<br />
Från planeter till atomer<br />
När vi ville göra enheterna oföränderliga, satte vi vår tillit till<br />
fenomen som vi kunde iaktta i naturen och som vi trodde var<br />
beständiga i tiden. T.ex. knöt vi längdenheten till jordradien<br />
och tidsenheten till astronomiska rörelsefenomen. Efterhand<br />
som mättekniken utvecklades upptäckte vi att dessa<br />
fenomen på intet sätt är oföränderliga. Redan år 1870<br />
förklarade den engelske fysikern James Clerk Maxwell (1831<br />
- 1879) att:<br />
"Om vi vill skaffa oss absoluta, oföränderliga enheter för<br />
längd, tid och massa, så bör vi inte vara beroende av våra<br />
planeters rörelser eller massa utan hålla oss till våglängd,<br />
frekvens och massa hos oförgängliga, oföränderliga och<br />
fullständigt likartade atomer."<br />
Nuförtiden försöker vi basera våra enheter på just atomära<br />
fenomen. Tidsenheten är t.ex. knuten till egenskaper hos<br />
Cs-atomen. Massenheten "ett kilogram" saknar dock<br />
fortfarande en förankring till atomerna och finns fortfarande i<br />
sinnevärlden som en väl bevakad platina-iridiumklump.<br />
År 1101 definierade kung Henrik I den engelska enheten<br />
"en yard" som: "avståndet mellan kungens nässpets och det<br />
mellersta fingret då han höll armen utsträckt".
Storhet Beteckning Enhet Benämning<br />
Längd 1 m en meter<br />
Massa m 1 kg ett kilogram<br />
Tid t 1 s en sekund<br />
Elektrisk ström I 1 A en ampere<br />
Temperatur T, Θ 1 K en kelvin<br />
Substansmängd n 1 mol en mol<br />
Ljusstyrka I 1 cd en candela<br />
Tabell 2 SI-systemets supplementenheter<br />
Storhet Beteckning Enhet Benämning<br />
Plan vinkel α, β, γ 1 rad en radian<br />
Rymdvinkel ω 1 sr en steradian<br />
Tabell 3 Jämförelse mellan olika språk<br />
Storlek Sverige Tyskland UK USA<br />
10 6 en million eine Million one million one million<br />
10 9 en milljard eine Milliarde one milliard one billion<br />
10 12 en billjon eine Billion one billion one trillion<br />
10 18 en triljon one trillion<br />
Tabell 4 Prefixen och deras ursprung<br />
Prefix Beteckning Storlek Ursprung<br />
yetta Y 10 24 1000000000000000000000000<br />
zetta Z 10 21 1000000000000000000000<br />
exa E 10 18<br />
peta P 10 15<br />
tera T 10 12<br />
giga G 10 9<br />
mega M 10 6<br />
kilo k 10 3<br />
hekto h 10 2<br />
deka da 10 1<br />
deci d 10 -1<br />
centi c 10 -2<br />
milli m 10 -3<br />
mikro μ 10 -6<br />
nano n 10 -9<br />
piko p 10 -12<br />
femto f 10 -15<br />
atto a 10 -18<br />
1000000000000000000 gr: exa - sex<br />
1000000000000000 gr: peute - fem<br />
1000000000000 gr: teras - monster<br />
1000000000 gr: gigas - jätte<br />
1000000 gr: megas - stort<br />
1000 gr: chilioi - tusen<br />
100 gr: hekaton - hundra<br />
10 gr: deka - tio<br />
0,1 la: decem - tio<br />
0,01 la: centum - hundra<br />
0,001 la: mille - tusen<br />
0,000001 gr: mikros - liten<br />
0,000000001 gr: nanos - dvärg<br />
0,000000000001 sp: piko - liten bit<br />
0,000000000000001 nord: femten/ton<br />
0,000000000000000001 nord: atten - arton<br />
zepto z 10 -21 0,000000000000000000001<br />
yocto y 10 -24 0,000000000000000000000001<br />
© Nina Reistad 2005 31
Appendix 1 Enheter och dimensioner<br />
Figur 2 SI-systemets grundenheter.<br />
Årtalen anger det år då definitionen<br />
antogs av CGPM (Conférence des<br />
Poids et Mesures). Notera att endast<br />
temperatur-, tid- och massenheten är<br />
oberoende av de övriga<br />
grundenheterna. Kopplingen mellan<br />
enheterna anges med pilar i figuren.<br />
a<br />
Figur 3 Såväl kvadratens som<br />
cirkelns area är proportionella mot<br />
(längd) 2 .<br />
32<br />
a<br />
1971<br />
1983<br />
1948<br />
1967<br />
Exempel 1 Avstämning av kraftenheten<br />
Enheten för kraft definieras genom att utgå ifrån sambandet F = k⋅m⋅a, därefter<br />
avstäms enheten genom att välja konstanten<br />
2<br />
[ F]<br />
= 1⋅[<br />
m]<br />
⋅[<br />
] = 1⋅<br />
kg ⋅1<br />
m/s<br />
k ≡ 1 ⇒<br />
a ⋅<br />
Exempel 2 Avstämning av areaenheten<br />
Hur har enheten en kvadratmeter uppkommit? Både kvadratens och cirkelns area<br />
måste av dimensionsskäl vara proportionell mot längd i kvadrat. Vi kan välja att<br />
antingen utgå från kvadraten eller cirkeln då vi avstämmer areaenheten.<br />
Utgår vi ifrån kvadraten får vi:<br />
2<br />
Akvadrat = kkvadrat<br />
⋅ a<br />
Väljer vi nu kkvadrat = 1 får vi areaenheten en kvadratmeter ur<br />
2<br />
Akvadrat = a<br />
vilket innebär att cirkelns area uttryckt i enheten en kvadratmeter är<br />
A cirkel<br />
Temperatur<br />
1 K<br />
2<br />
= π ⋅ a<br />
Hade vi istället utgått ifrån cirkelns area, dvs.<br />
2<br />
Acirkel = kcirkel<br />
⋅ a<br />
och istället avstämt enheten en cirkelmeter, dvs. valt kcirkel = 1, hade vi fått<br />
enheten för area ur<br />
2<br />
Acirkel = a<br />
vilket hade inneburit att kvadratens area uttryck i enheten en cirkelmeter blivit<br />
1<br />
= a<br />
π<br />
Akvadrat ⋅<br />
2<br />
Tid<br />
1 s<br />
Massa<br />
1 kg<br />
Substans-<br />
mängd<br />
1 mol<br />
Längd<br />
1 m<br />
Elektrisk<br />
ström<br />
1 A<br />
Ljusstyrka<br />
1 cd
Exempel 3 Härledning av enheten för hastighet<br />
Sambandet mellan storheterna hastighet (v), förflyttning (s) och tidsintervall (t) är<br />
s<br />
v =<br />
t<br />
Den härledda SI-enheten för hastighet är därför<br />
[] v<br />
[] s<br />
[]<br />
= t<br />
=<br />
1m<br />
= 1m/s<br />
1s<br />
Exempel 4 Skrivregler för härledda enheter<br />
Enheten för värmeövergångstalet är<br />
[] h<br />
=<br />
[ P]<br />
1W<br />
=<br />
[ A]<br />
⋅[<br />
T ] 2<br />
1m<br />
⋅1<br />
K<br />
Om denna enhet skrivs 1 W/m 2 ·K kan detta tolkas på 2 olika sätt<br />
1 W/m<br />
2<br />
2 ( m ⋅ K)<br />
⎪⎧<br />
1W/<br />
⋅ K = ⎨<br />
⎪⎩ 1W<br />
⋅ K/m<br />
Därför bör vi skriva 1 W/(m 2 ·K) eller 1 W·m -2 ·K -1 .<br />
2<br />
Exempel 5 Omskrivning av en storhets- i en enhetsekvation<br />
Storheten effekt (P) definieras som arbete (W) per tidsenhet (t). Storhetsekvationen<br />
W<br />
P =<br />
t<br />
kan skrivas om i enhetsekvationen<br />
[ P ]<br />
[ W ]<br />
1J<br />
= ⇔ 1 W =<br />
[] t 1s<br />
Exempel 6 Omvandling av enheter<br />
På de flesta amerikanska vägar är hastighetsbegränsningen 55 mph. Vi omvandlar<br />
detta till enheten 1 km/h och 1 m/s på följande sätt<br />
mile 1609,<br />
344⋅<br />
m 88514⋅10<br />
v = 55⋅<br />
= 55⋅<br />
=<br />
h<br />
1⋅<br />
h<br />
1⋅<br />
h<br />
88,<br />
5⋅<br />
km 88,<br />
5⋅10<br />
⋅ m<br />
= =<br />
= 24,<br />
6⋅<br />
m/s<br />
1⋅<br />
h 60⋅<br />
60⋅<br />
s<br />
3<br />
−3<br />
⋅ km<br />
© Nina Reistad 2005 33
Appendix 1 Enheter och dimensioner<br />
Figur 4 Great Western var dåtidens<br />
största fartyg, men det kostade en<br />
smärre förmögenhet att driva det.<br />
34<br />
Dimensioner<br />
Dimensionsbegreppet har sitt ursprung i de grekernas intresse för geometri 7 .<br />
Grekerna funderade bl.a. på hur man kan bestämma areor och volymer. I<br />
första hand var de intresserade av att bestämma landareor samt<br />
skördevolymer. Det blev viktigt att veta hur många mätningar som behövdes<br />
för att bestämma en area eller volym. Begreppet dimension har sitt ursprung i<br />
denna önskan. Grekerna menade ungefär ”antalet oberoende mätningar” 8 .<br />
Principen bakom dimensionsanalysen var troligtvis känd redan i början av<br />
1830-talet, då en ingenjör Isambard Kingdom Brunel (1806 - 1859) använde<br />
enkla men grova dimensionsargument vid ett offentligt möte för att avfärda en<br />
kritiker som menade att han hade bevisat att det av Brunels projekterade<br />
ångfartyget "Great Wester" inte skulle kunna lasta tillräckligt med kol för att<br />
korsa Atlanten. Lord Rayleigh, bl.a. känd för sina pionjärarbeten i flygteknik,<br />
tilldelas normalt äran av att ha formaliserat den "teknik" som numera kallas<br />
för "dimensionsanalys". Dimensionsanalysen har sedan mitten av 1850-talet<br />
varit ett basverktyg för såväl ingenjörer som tillämpade matematiker. Under<br />
1900-talet har tekniken utvecklats till ett standardverktyg inom flera andra<br />
naturvetenskaper, t.ex. biologi, ekologi och medicin.<br />
De flesta av oss blir inte medvetna om dimensionsbegreppet förrän vi har<br />
använt det i dimensionsanalyser, då tvingas vi balansera våra ekvationer med<br />
avseende på dimensionerna. Detta hjälper oss då vi ska tänka och förebygger<br />
fel. Motsatsen gäller också; alla ekvationer måste vara balanserade med<br />
avseende på dimensionerna, vilket vi kan utnyttja för att gissa oss till<br />
samband som kan vara svåra att upptäcka på annat vis.<br />
Sammanfattningsvis kan vi säga att dimensionsbegreppet kan användas dels<br />
som ett verktyg för att kontrollera, och dels för att härleda samband och<br />
formler. Styrkan med dimensionsbegreppet är att det dels kan visa på<br />
lösningar på problem som annars hade varit omöjliga och dels visa på<br />
fysikaliska samband som inte är uppenbara.<br />
Exempel 7 Mental dimensionsanalys<br />
Anta att vi behöver räkna ut den tillryggalagda sträckan vid en likformigt<br />
accelererad rörelse. Vi kommer inte ihåg sambandet mellan sträckan (s), tiden (t),<br />
utgångshastigheten (v0) och accelerationen (a), men tror att det var någonting i stil<br />
med s = v0·t + a/2? Vi kan givetvis kontrollera sambandet i någon formelsamling<br />
utan tryckfel. Men det går fortare om vi genomför en mental dimensionsanalys:<br />
sträckan (s) har dimensionen "längd", hastigheten (v0) "längd per tidsenhet" och<br />
accelerationen (a) "längd per tidsenhet i kvadrat". Produkten v0·t har också<br />
dimensionen "längd". Eftersom det inte går att addera äpplen med päron måste den<br />
sista termen också ha dimensionen "längd". Det får vi om vi multiplicerar<br />
accelerationen med tiden i kvadrat. Dvs. sambandet är s = v0·t + a·t 2 /2. Nu kan vi<br />
argumentera mot det här tillvägagångssättet, målsättningen för all vetenskap är att<br />
förstå de bakomliggande fysikaliska principerna. I dimensionsanalysen har vi inte<br />
den målsättningen, åtminstone inte till att börja med.<br />
7<br />
Grekiska: “ge” - jord; “metron” - mäta; “geometri” – "jordmätning, att mäta jord…".<br />
8<br />
Latin: “di” - oberoende; “metiori” - mätning; “dimensio” – "antalet oberoende<br />
mätningar…".
Dimensionerna i SI-systemet<br />
En storhets "dimension" är inte samma sak som storheten själv. T.ex. säger<br />
Newtons 2: a lag att kraften (F) är lika med massan (m) multiplicerat med<br />
accelerationen (a) och vi skriver F = m·a. De kursiverade symbolerna F, m<br />
och a betyder mätetal multiplicerat med enhet. Dimensionen av t.ex. m<br />
representeras med en stor bokstav, M. Vi använder en rak istället för<br />
kursiverad stil för att göra det tydligt att vi inte menar en variabel som kan<br />
ersättas med ett mätvärde. M är ett påstående som talar om vilken fysikalisk<br />
egenskap storheten m har. M säger ingenting om hur stor m är. På samma sätt<br />
har t.ex. storheten hastighet (v) dimensionen längd (L) per tidsenhet (T -1 ),<br />
vilket ger L·T -1 . Storheten acceleration (a), dvs. hastighetsförändring per<br />
tidsenhet har således dimensionen hastighet/tid 2 eller L·T -2 . I Tabell 5 anges<br />
dimensionerna för alla grundstorheterna i SI-systemet.<br />
Allt det här kan skrivas i en mer kompakt form, dim(x) betyder "dimensionen<br />
av storheten x" och således är dim(m) = M och dim(a) = L·T -2 . I en ekvation<br />
som relaterar flera variabler med varandra är egentligen likhetstecknet ett verb<br />
som säger att uttrycket på vänster sida om likhetstecknet är identiskt med<br />
uttrycket på höger sida. Om detta är sant för dimensionerna är det också sant<br />
för storheterna och således om Newton säger F = m·a då gäller också att<br />
dim(F) = dim(m)·dim(a). Dvs. storheten kraft har dimensionen M·L·T -2 .<br />
Exempel 8 Elasticitetsmodul<br />
Elasticitetsmodulen är en materialkonstant som anger hur materialet beter sig vid en<br />
belastning. Elasticitetsmodulen kan uttryckas<br />
F L0<br />
E = ⋅<br />
A ΔL<br />
Det betyder att elasticitetsmodul har dimensionen<br />
dim( F)<br />
dim( L<br />
dim( E ) = ⋅<br />
dim( A)<br />
dim( ΔL)<br />
−2<br />
0) M ⋅ L ⋅ T L -1<br />
−2<br />
= ⋅ = M ⋅ L ⋅ T<br />
2<br />
L<br />
Kontroll av samband<br />
Den största praktiska betydelsen av dimensionsbegreppet är att det ger ett<br />
enkelt verktyg för att kontrollera och/eller komma ihåg formler. Man måste<br />
dock vara uppmärksam på att:<br />
Vissa konstanter och storheter är dimensionslösa.<br />
Flera storheter kan ha samma dimension 9 .<br />
Det är ett nödvändigt men inte tillräckligt villkor att dimensionerna är riktiga.<br />
9 Exempelvis har storheterna “arbete” och “vridmoment” samma dimension.<br />
L<br />
Tabell 5 SI-systemets dimensioner<br />
Storhet Enhet Dimension<br />
Längd 1 m L<br />
Massa m 1 kg M<br />
Tid t 1 s T<br />
Elektrisk ström I 1 A I<br />
1 K<br />
Temperatur T, Θ Θ<br />
Substansmängd n 1 mol N<br />
Ljusstyrka I 1 cd J<br />
Det finns goda möjligheter till förväxlingar,<br />
exempelvis används beteckningen “I ” för<br />
storheterna ‘elektrisk ström’ och<br />
‘ljusstyrka’, medan beteckningen “I ”<br />
används för ‘dim(elektrisk ström) = dim(I);<br />
beteckningen “T” eller “Θ” används för<br />
storheten ‘termodynamisk temperatur<br />
medan dim(Termodynamisk temperatur) =<br />
dim(T) = Θ eller dim(Termodynamisk<br />
temperatur) = dim(Θ) = Θ osv.<br />
© Nina Reistad 2005 35
Appendix 1 Enheter och dimensioner<br />
r<br />
Figur 5 Vinkelenheten en radian<br />
definieras som förhållandet mellan<br />
bågens längd och radie.<br />
36<br />
θ<br />
b<br />
Exempel 9 Dimensionslösa storheter<br />
En plan vinkel (θ) uttrycks i enheten “en radian” 10 och definieras som förhållandet<br />
mellan båglängden (b) och radien (r) enligt θ ≡ b r (). Vinkelstorheten är<br />
dimensionslös, vilket vi kan kontrollera:<br />
( b)<br />
() r<br />
dim L<br />
dim ( θ ) ≡ = = 1<br />
dim L<br />
Exempel 10 Två storheter med samma dimension<br />
Arbete är en skalär storhet som definieras via skalärprodukten W ≡ F ⋅ x , varför<br />
−2<br />
2 -2<br />
( W ) = dim(<br />
F ) ⋅ dim(<br />
x)<br />
= ( M ⋅ L ⋅ T ) ⋅ ( L)<br />
ML T<br />
dim =<br />
Vridmoment är en vektor som definieras via τ ≡ x × F varför<br />
−2<br />
2 -2<br />
( τ ) = dim(<br />
x)<br />
⋅ dim(<br />
F ) = ( L)<br />
⋅ ( M ⋅ L ⋅ T ) ML T<br />
dim =<br />
Arbete och vridmoment är två storheter med samma dimension. Det går inte att<br />
skilja på en skalär och en vektorstorhet - dimensionerna är knutna till storhetens<br />
belopp.<br />
Exempel 11 Kontroll av samband<br />
Perioden för en konisk pendel ges av uttrycket<br />
T = 2 ⋅π<br />
⋅<br />
⋅ cosθ<br />
g<br />
Vi kan kontrollera formeln genom att betrakta dimensionerna för vänster (VL)<br />
respektive höger led (HL):<br />
dim<br />
dim<br />
( VL)<br />
= dim(<br />
T )<br />
( HL)<br />
⎛ cos ⎞<br />
dim⎜<br />
⋅ θ<br />
= 2 ⋅π<br />
⋅ ⎟<br />
⎜<br />
⎟<br />
⎝<br />
g<br />
⎠<br />
= dim<br />
= T<br />
⎛ ⋅ cosθ<br />
⎞<br />
⎜<br />
⎝<br />
g ⎟<br />
⎠<br />
⎛ L ⋅1<br />
1/<br />
2<br />
⎞<br />
−2<br />
⎝ L ⋅ T ⎠<br />
( 2 ⋅π<br />
) ⋅ dim⎜<br />
⎟ = 1⋅<br />
⎜ ⎟ = T<br />
Formeln är således dimensionsriktig. Dimensionerna hade stämt även om vi hade<br />
utelämnat faktorerna 2·π och cos(θ). Dimensionskontrollen utvisar om ett samband<br />
är fel, men den kan inte bekräfta att ett samband är rätt.<br />
10 Latin: “radius” - hjuleker.
Härledning av samband<br />
Via en dimensionsanalys kan vi inte bara kontrollera en formel utan ofta även<br />
gissa sambandet, så när som på någon dimensionslös konstant/storhet. Det<br />
finns två “recept” på hur vi gör i praktiken:<br />
Produktansats<br />
π-gruppsmetoden<br />
Eftersom många (om inte de flesta) fysikaliska samband är multiplicita<br />
samtidigt som det är både arbetsbesparande och enklare att göra en<br />
produktansats begränsar vi den fortsatta framställningen till produktansatser.<br />
I praktiken arbetar vi enligt följande recept:<br />
Rita en figur och försök förstå problemet.<br />
Identifiera vilka storheter som bör finnas med.<br />
Gör en produktansats.<br />
Genomför en dimensionsanalys.<br />
Genomför eventuellt ett eller flera experiment.<br />
Vi ska studera den här tekniken i 3 exempel. Det första är tänkt att illustrera<br />
hur vi med hjälp av dimensionsanalys kan resonera informellt, medan 0 är<br />
mer metodisk.<br />
Exempel 12 Dimensionsresonemang<br />
Anta att du och dina vänner skall på campingsemester med er nya husvagn. Det<br />
blåser och du oroar dig för de krafter som vinden kan utöva på husvagnen. Du vill<br />
därför försäkra dig om att det trots stormvarning är säkert att ge dig iväg. Du är<br />
övertygad om att kraften på vagnen måste bero på vindhastigheten och husvagnens<br />
area. Du gissar att kraften (F) är en funktion av vindhastigheten (v) och arean (A)<br />
a b<br />
enligt sambandet F ∝ A ⋅ v , där a och b är okända exponenter. Ekvationen måste<br />
vara dimensionsmässigt rätt,<br />
a b<br />
dim( F)<br />
= dim( A)<br />
⋅ dim( v)<br />
−2<br />
M⋅<br />
L⋅<br />
T =<br />
( ) ( ) b<br />
a 2 −1<br />
L ⋅ L⋅<br />
T<br />
Du inser genast att någonting är fel, dimensionen "massa" finns på vänster sida om<br />
likhetstecknet men inte på höger. Oberoende av värdena på a och b kan aldrig<br />
ekvationen bli dimensionsmässigt riktig. Du tvingas tänka en gång till och kommer<br />
på att luftens densitet (ρ), som har dimensionen M·L -3 kanske har med kraften att<br />
a b c<br />
göra. Du gör en ny gissning F ∝ A ⋅ v ⋅ ρ . Nu blir dimensionsekvationen<br />
M⋅<br />
L⋅<br />
T<br />
−2<br />
=<br />
( ) ( ) ( ) c<br />
b<br />
a 2 −1<br />
−3<br />
L ⋅ L⋅<br />
T ⋅ M⋅<br />
L<br />
som blir dimensionsmässigt riktig om a = 1, b = 2 och c = 1. Utan någon teori från<br />
fysiken har du via dimensionsanalys kommit fram till att kraften på din husvagn ges<br />
av F = k·A·v 2 ·ρ, där k är en dimensionslös konstant som du måste bestämma<br />
experimentellt.<br />
© Nina Reistad 2005 37
Appendix 1 Enheter och dimensioner<br />
Exempel 13 Produktansats<br />
Den matematiska pendeln definieras av en liten punktformig klump med massan m,<br />
som hänger i ett viktlöst snöre med längden . Klumpen svänger fram och tillbaka i<br />
ett plan. Sök ett uttryck för klumpens period (T).<br />
θ <br />
Lösning Vi börjar med att rita en figur (). Därefter försöker vi gissa vilka storheter<br />
som kan tänkas ingå i sambandet? I praktiken är det enklast att göra en tabell (se<br />
m<br />
Tabell 6). Vi har 4 storheter och 3 ingående dimensioner. Det innebär att vi kanske<br />
har 4 obekanta men att vi bara kommer att kunna åstadkomma 3 ekvationer. Vi kan<br />
redan nu konstatera att den fortsatta analysen inte kommer att resultera i ett<br />
fullständigt samband. Det kommer att krävas någon form av mätningar.<br />
Figur 6 Den matematiska plana<br />
pendeln. Anta att sambandet mellan variablerna är en produkt, dvs. gissa följande:<br />
Tabell 6 Perioden för den plana pendeln,<br />
storheter.<br />
Storhet Enhet Dimension<br />
Svängningstid T 1 s T<br />
Massa m 1 kg M<br />
Längd 1 m L<br />
Tyngdacceleration g<br />
38<br />
1 m/s 2<br />
L·T -2<br />
⎪⎧<br />
x y z<br />
T = konstant ⋅ m ⋅<br />
⋅ g<br />
⎨<br />
⎪⎩ dim(<br />
konstant)<br />
= 1<br />
Vi kan pröva produktansatsen genom en dimensionsanalys. Det betyder att vi gör<br />
en omskrivning av storhetsekvationen i dimensioner, dvs.<br />
( ) ( ) ( ) ( ) ( ) z<br />
y<br />
x<br />
T = dim konstant ⋅ dim m ⋅ dim dim g<br />
dim ⋅<br />
⇒ T = 1⋅<br />
M ⋅ L ⋅<br />
−2<br />
z<br />
x y+<br />
z −2<br />
z<br />
( L ⋅ T ) ⇔ T = 1⋅<br />
M ⋅ L ⋅ T<br />
x y<br />
⋅<br />
Dimensionerna i höger och vänster led måste vara lika, varför vi får ett<br />
ekvationssystem med 3 variabler. Samma<br />
massdimension,<br />
M :<br />
längddimension,<br />
L :<br />
tidsdimension,<br />
T :<br />
0 = x<br />
0 = y + z<br />
1 = −2⋅<br />
z<br />
Ekvationssystemet har lösningen x = 0, y = 1/2 och z = -1/2. Det innebär att<br />
produkten kan skrivas T = konstant ⋅ g . Det krävs bara en mätning av perioden<br />
och samhörande längd (t.ex: g = 9,81 m/s 2 , = 0,5 m och T = 1,42 s) för att få fram<br />
det slutliga sambandet:<br />
sambandet är med andra ord<br />
konstant = T ⋅ g = 1,<br />
42 ⋅ 9,<br />
81 0,<br />
5 ≈ 6,<br />
3 . Det sökta<br />
T<br />
= 6 , 3<br />
⋅<br />
<br />
g<br />
Notera att massoberoendet följde direkt ur dimensionsanalysen och att vi fick<br />
längd- och accelerationsberoendet utan att det krävdes något experiment. Det räckte<br />
med en mätning av två samhörande variabler. En teoretisk härledning ger att<br />
konstantens värde är 2π, dvs. sambandet T = 2 ⋅π<br />
⋅ g , om utslagsvinkeln är liten,<br />
så att vi kan sätta sin θ ≈ θ .
Exempel 14 Gränshastigheter för fröer<br />
Många växter sprider sina fröer och frukter med vinden. Hur väl de lyckas sprida<br />
sin avkomma beror på hur länge fröet eller frukten kan ”stanna i luften”. Lång tid i<br />
luften betyder längre tid att färdas från moderplantan. Det är därför vanligt med<br />
”luddiga” beklädnader och olika typer av ”vingar”. Genomför en dimensionsanalys<br />
och sök ett uttryck för ett frös gränshastighet, dvs. den hastighet fröet uppnår när<br />
tyngdkraften balanseras av luftmotståndet.<br />
Lösning Vi börjar med att gissa vilka storheter som kan tänkas påverka<br />
gränshastigheten. Dessa sammanfattar vi i en tabell (se Tabell 7). Vi har 5 variabler<br />
och 3 ingående dimensioner. Det betyder att dimensionsanalysen måste<br />
kompletteras med någon form av mätserie.<br />
Vi ansätter att sambandet är en produkt, dvs. gissar följande:<br />
a<br />
b<br />
c<br />
( konstant)<br />
1<br />
v = konstant ⋅ m ⋅ g ⋅ A ⋅ ρ , där dim =<br />
g<br />
d<br />
Vi prövar produktansatsen genom en dimensionsanalys. Det betyder att vi gör en<br />
omskrivning av storhetsekvationen i dimensioner, dvs.<br />
L ⋅T<br />
-1<br />
= 1⋅<br />
M<br />
-2 b 2 c −3<br />
d a+<br />
d b+<br />
2⋅c−3⋅d<br />
−2<br />
b<br />
( L ⋅T<br />
) ⋅ ( L ) ⋅ ( M ⋅ L ) = M ⋅ L ⋅T<br />
a ⋅<br />
⋅<br />
-1<br />
= -2<br />
⋅b<br />
Figur 7 Några vindburna fröer.<br />
Tabell 7 Gränshastigheten för fröer.<br />
Storhet Enhet Dimension<br />
Gränshastigeht vg 1m/s<br />
Dimensionerna i höger och vänster led måste vara lika, varför vi får ett Massa m 1 kg M<br />
ekvationssystem med 3 variabler. Samma<br />
1 m/s 2<br />
L·T -2<br />
Tyngdacceleration g<br />
1 m 2<br />
L 2<br />
Area A<br />
längddimension, L : 1 = b + 2⋅<br />
c − 3⋅<br />
d<br />
1 kg/m<br />
massdimension,<br />
M : 0 = a + d<br />
3 M·L -3<br />
Densitet ρ<br />
tidsdimension,<br />
T :<br />
Lösningen är d = -a, b = ½ och c = (1/4) - (3/2)·a, vilket innebär att<br />
v<br />
g<br />
a<br />
1/<br />
2<br />
( 1/<br />
4)<br />
−(<br />
3 / 2)<br />
⋅a<br />
= konstant ⋅ m ⋅ g ⋅ A ⋅ ρ<br />
Dimensionsanalysen ger inte hela sambandet. Vi måste genomföra en mätning för<br />
att bestämma parametern a. I princip kan vi välja att mäta vg som funktion av m, g,<br />
A eller ρ. I praktiken är det dock omöjligt att variera g. Fröerna faller i luft vid<br />
normalt tryck och temperatur. Att variera densiteten är visserligen möjligt men<br />
besvärligt. Enklast är att mäta vg som funktion av m. Vi ansätter då<br />
g<br />
1/<br />
2<br />
−a<br />
( 1/<br />
4)<br />
−(<br />
3/<br />
2)<br />
⋅a<br />
a<br />
v = k ⋅ m , där k = konstant ⋅ g ⋅ A ⋅ ρ<br />
Notera att k inte är dimensionslös. Vi linjäriserar sambandet<br />
( ) = lg k + a lg m<br />
lg ⋅<br />
v g<br />
I ett diagram där vi avsätter lg(vg) som funktion av lg(m) får vi en rät linje vars<br />
riktningskoefficient är a. I en studie från 1986 mäter Augspurger gränshastigheten<br />
för att antal fröer från tropiska träd i Panama. Diagrammet visar lg(vg/(m/s)) som<br />
funktion av lg(m/mg). Den räta linjen i diagrammet har riktningskoefficienten 0,5.<br />
Det betyder att a = 0,5 och det sökta sambandet är<br />
vg = konstant ⋅<br />
m ⋅ g<br />
A⋅<br />
ρ<br />
−a<br />
L·T -1<br />
•••• •<br />
14<br />
12<br />
•<br />
10<br />
8<br />
6<br />
•<br />
4<br />
• •<br />
2<br />
0<br />
0 2 4 6 8 10 12 14 16 18 20<br />
m / mg<br />
Figur 8 Gränshastigheten (vg) som<br />
funktion av massan (m) för några<br />
vindburna fröer.<br />
4,0<br />
3,0<br />
2,0<br />
1,0<br />
0,0<br />
• •• • •<br />
•<br />
•<br />
•<br />
•• • •<br />
•<br />
-3,0 -2,0 -1,0 0,0 1,0 2,0<br />
lg(m/mg)<br />
Figur 9 Gränshastigheten (v g) som<br />
funktion av massan (m) för några<br />
vindburna fröer i ett logaritmiskt<br />
diagram. Den räta linjen har<br />
riktningskoefficienten 0,5.<br />
© Nina Reistad 2005 39
Appendix 1 Enheter och dimensioner<br />
Figur 10 I Landet Lilleput möter<br />
Gulliver varelser som är 12 gånger<br />
mindre än Gulliver själv.<br />
Figur 11 Dumbo behöver sina stora<br />
öron för att inte bli överhettad.<br />
40<br />
Exempel 15 Lilleput – dvärgarnas land<br />
I boken om Gullivers äventyr beskrivs invånarna i Lilleput som 12 gånger mindre<br />
än Gulliver. Efter noggranna överväganden bestämde ministrarna att Gulliver skulle<br />
få 12 3 = 1728 normalransoner mat. Var detta riktigt?<br />
Lösning Om en lilleputian har längden L är Gullivers längd 12·L. Matbehovet<br />
bestäms av ytan och en lilleputians kroppsyta (AL) är proportionell mot dess längd i<br />
kvadrat, dvs. AL ∝ L 2 . Gullivers kroppsyta (AG) är då AG ∝ (12·L) 2 = 144·L 2 .<br />
Lilleputianerna gjorde det felaktiga antagandet att matbehovet är proportionellt mot<br />
kroppsvolymen (massan), dvs. VL ∝ L 3 och VG ∝ (12·L) 3 = 1728·L 3 = 1728·VL.<br />
Matbehovet bestäms av Gullivers yta. Han kan därför nöja sig med 12 2 = 144<br />
normalransoner.<br />
Exempel 16 Hur litet kan ett djur bli?<br />
Den värmemängd som ett djur kan tillgodogöra från födan beror på djurets massa<br />
(m), dvs. den varierar med längd i kubik (L 3 ). Den värmemängd som kan föras bort<br />
från kroppen beror å andra sidan på arean, dvs. är proportionell mot längd i kvadrat<br />
(L 2 ). Värmeproduktionen måste balanseras av värmeförlusten. Förminskar vi ett<br />
djur med en faktor 10 minskar den värmeavgivande ytan bara med en faktor 100<br />
medan värmeproduktionen minskar med en faktor 1000. Det lilla djuret kan delvis<br />
kompensera för detta genom att äta mer eller genom att effektivisera<br />
ämnesomsättningen. Avkylningen kan också minskas genom att det lilla djuret<br />
söker upp en skyddande håla. Men dessa möjligheter att påverka värmebalansen<br />
kan inte tänjas obegränsat. Det blir till slut omöjligt att upprätthålla en konstant<br />
kroppstemperatur. Varmblodiga djur kan därför inte vara hur små som helst, om de<br />
ska klara att leva utomhus under kalla vintrar. Dvärgnäbbmusen (Sorex<br />
minutissimus) som finns bl.a. i Norrbotten väger som fullvuxen bara ca 3 g. Den<br />
ligger nära gränsen för djur som kan överleva i Sverige.<br />
Litteratur<br />
Abbott, A., Flatland, a romance of many<br />
dimensions., Barnes & Noble Books,<br />
1983.<br />
Buckingham, E., Phys. Rev., 4, 345, 1914.<br />
Dahl, K., Den fantastiska matematiken,<br />
Fisher&C0, 1991.<br />
Friesen, von S., Om mått och män., Bra<br />
Bok, 1987.<br />
Jönsson., B. och Reistad., N.,<br />
Experimentell Fysik., Studentlitt.<br />
1987.<br />
Pennycuick., C. J., Newton Rules Biology:<br />
A physical approach to biological<br />
problems., Oxford Univ. Press., 1992.<br />
Svensk standard SS 01 61 18: Storheter<br />
och enheter - allmänna principer och<br />
skrivregler.<br />
Symbols, units, nomeclature and<br />
fundamental constants in physics.,<br />
Doc. I.U.P.A.P.-25, SUNAMCO 87-1.
Appendix 2<br />
.<br />
Mätvärdesanalys<br />
Linjärisering och annan list<br />
En definition av vetenskapen fysik skulle kunna vara: ”Fysik är en samling<br />
modeller av naturen, byggda på, och i överensstämmelse med, tidigare<br />
experimentella resultat”. Modellerna ska dessutom kunna förutsäga resultatet<br />
av nya mätningar. Experiment och vår förmåga att analysera dem har m.a.o.<br />
en central betydelse. Lösryckta experimentella resultat, liksom helt fristående<br />
teoretiska funderingar är i allmänhet av mindre intresse – det verkligt<br />
spännande och produktiva ligger i samspelet mellan experimentella resultat<br />
och teoretiska modeller.<br />
Målsättningen med ett experiment är ofta att försöka hitta samband mellan<br />
storheter. Detta kan leda till en modell, en teori eller varför inte en naturlag.<br />
Genom växelverkan och jämförelser mellan modeller och experiment ökar vår<br />
kunskap. I flera fall har vi en modell som vi inte riktigt kan använda i<br />
praktiken, men som kan vara av värde som en utgångspunkt i våra försök att<br />
med matematik beskriva naturen. T.ex. finns det en modell för ett föremåls<br />
fria fall i vakuum. I praktiken faller ganska få föremål i vakuum utan påverkas<br />
av ett luftmotstånd. Det finns modeller för hur luftmotståndet påverkar olika<br />
föremål. Men dessa modeller är begränsade till föremål med vissa bestämda<br />
former. Det är t.ex. omöjligt att beskriva hur en fallskärm fungerar i praktiken<br />
eftersom det inte är möjligt att beskriva hopparens och skärmens form med<br />
någon större matematisk precision. Det är nödvändigt att genomföra<br />
experiment och således utföra ett antal "provhopp" innan fallskärmen börjar<br />
produceras och säljas. Utifrån resultaten av sådana prov kan vi skapa<br />
semiempiriska modeller. Vi ska studera hur vi kan systematisera våra<br />
experimentella observationer för att finna samband mellan storheter, dvs.<br />
börja bygga modeller av naturen. Som en naturlig början väljer vi att studera<br />
linjära samband.<br />
Diagram i olika former är ett av de mest kraftfulla verktyg vi har för att hitta<br />
samband. Vi har en säregen förmåga att känna igen mönster och ett diagram<br />
kan avslöja information som annars inte hade framträtt. Diagrammet är också<br />
ett utmärkt sätt att sammanfatta och presentera experimentella resultat. Till de<br />
viktigaste egenskaperna hos ett diagram hör<br />
Mätintervallet blir tydligt.<br />
Osäkerheten i mätvärdena framträder.<br />
Eventuella samband mellan storheter framträder.<br />
Mätvärden som avviker från de övriga kan lätt identifieras.<br />
Datorbaserade verktyg som t.ex. MatLab eller ett kalkylblad som Excel gör<br />
det numera mycket enkelt att rita diagram.<br />
41
Oxygen concentration / (at. %)<br />
Appendix 2 Mätvärdesanalys<br />
0 1 2 3 4 5 6 7 8 9 10<br />
U<br />
(10 -3 ·V)<br />
0 1 2 3 4 5 6 7 8 9 10<br />
U·10 3<br />
(V)<br />
Figur 1 Ovanstående<br />
axelbeteckningar ska inte användas<br />
eftersom det inte är entydigt vad som<br />
menas.<br />
0 1 2 3 4 5 6 7 8 9 10<br />
U / mV<br />
0 1 2 3 4 5 6 7 8 9 10<br />
U / (10 -3 ·V)<br />
Figur 2 Ovanstående<br />
axelbeteckningar bör användas,<br />
eftersom de inte kan misstolkas.<br />
Depth / (nm)<br />
Figur 3 Exempel på hur felgränser i<br />
såväl x- som y-led kan markeras.<br />
Diagrammet visar<br />
syrekoncentrationen som funktion av<br />
djup i en 240 nm tjock Cr-film (Från<br />
Jiang et al. 1989).<br />
Figur 4 I valet av skalor väljer vi hur<br />
vi vill visa verkligheten.<br />
42<br />
Diagram<br />
I diagram ska vi tilldela axlarna beteckningar. Det finns minst 2 parallella<br />
skrivsätt, vilket har lett till missförstånd speciellt då det i beteckningen också<br />
ingår tiopotenser. Vi ska inte skriva på det vis som visas i , eftersom det inte<br />
är entydigt vad vi menar. Enligt de nuvarande normerna bör vi utgå från SIsystemets<br />
skrivsätt<br />
U = 7, 0 ⋅ mV<br />
(1)<br />
Vi ska tolka storhetsvärdet som ett mätetal multiplicerat med en enhet. Det<br />
betyder att vi kan dividera båda leden i ekvationen ovan med 1 mV, vilket ger<br />
7,<br />
0<br />
mV =<br />
U<br />
Beteckningen på diagramaxeln bör vara storheten dividerat med enheten,<br />
dvs. U/mV eller U/(10 -3 ·V). Dvs. då vi läser av värdet 7,0 på axeln skall detta<br />
tolkas som U/mV = 7,0 eller U/(10 -3 ·V) = 7,0.<br />
I diagrammet avsätter vi mätvärdena med symboler. Vi ska givetvis välja<br />
dessa så att det är lätt att avläsa värdena i diagrammet. Naturvetare och<br />
tekniker använder därför i huvudsak plustecken ( + ) som är parallella med<br />
axlarna (symbolen X är inte lika lämplig). Ibland förekommer också väl<br />
markerade runda punkter ( • ).<br />
För att visa mätvärdenas osäkerhet markerar vi mätpunkterna med felstaplar<br />
i diagrammet. Felstaplarna anger mätvärdets felgränser. I vissa fall finns det<br />
en osäkerhet i såväl x- som y-led (se ).<br />
Vi bör välja graderingen på axlarna så att hela diagramytan utnyttjas. Genom<br />
att välja axlar och skalor på lämpligt sätt kan det framträda information ur<br />
diagrammet som kanske inte annars hade varit tydlig. I valet av skalor och<br />
axlar väljer vi hur vi vill visa informationen (Error! Reference source not<br />
found.), vilket vi ska se flera exempel på i det här avsnittet.<br />
(2)
Linjära samband<br />
Linjära samband är mycket vanliga. Till de allmänt kända fysikaliska<br />
sambanden som är linjära hör exempelvis Newtons 2: a lag (F = m·a) och<br />
barometerformeln (p = p0 + ρ·g·h).<br />
Vi hittar linjära samband genom att först experimentellt bestämma<br />
samhörande mätvärden (t.ex. F och a samt p och h) och sedan i ett diagram<br />
pröva om sambandet är linjärt. Därefter kan vi fastställa<br />
riktningskoefficienterna och konstanter (t.ex. p0).<br />
Anta att vi mäter ett antal (n stycken) samhörande värden x och y<br />
( x y ) , ( x , y ) ,... ( x , y ) ,... ( x , y )<br />
1 , 1 2 2 i i n n<br />
(3)<br />
Om sambandet mellan x och y är linjärt gäller<br />
y = k ⋅ x + m<br />
(4)<br />
Vi kan enkelt pröva om det finns ett linjärt samband mellan storheterna x och<br />
y genom att i ett diagram avsätta y som funktion av x. Vi vill bestämma<br />
konstanterna k och m så att mätvärdena (xi, yi) ligger så nära den räta linjen<br />
y = k·x + m som möjligt. <strong>Experimentella</strong> mätresultat är aldrig ”exakta” utan är<br />
alltid behäftade med experimentella osäkerheter. Vi ska studera två olika sätt<br />
att bestämma konstanterna k och m utifrån ett antal mätvärden:<br />
Grafisk metod.<br />
Numerisk metod baserad på minsta kvadratprincipen.<br />
Vi ska inledningsvis i den ”grafiska metoden” lita på vår egen subjektiva<br />
förmåga att rita en linje som ansluter ”så bra som möjligt” till våra<br />
experimentella mätvärden. Sedan ska vi förfina vår metod genom att istället<br />
använda ett objektivt mått på en bra anpassning.<br />
Grafisk bestämning av den räta linjens ekvation<br />
För att grafiskt bestämma riktningskoefficienten (k) avläser vi två punkter på<br />
linjen, (xa, ya) samt (xb, yb), (). Riktningskoefficienten får vi ur<br />
k<br />
y<br />
−<br />
−<br />
y<br />
b a<br />
= (5)<br />
xb<br />
xa<br />
Konstanten (m) bestämmer vi antingen genom att avläsa linjens<br />
skärningspunkt på y-axeln, dvs. y(x=0) eller genom att avläsa en godtycklig<br />
punkt (xc, yc) på linjen och beräkna<br />
m ⋅<br />
= yc<br />
− k xc<br />
(6)<br />
Det är vanligt att inte använda punkten c utan istället någon av punkterna a<br />
eller b vid beräkningen av m.<br />
y<br />
D<br />
DD<br />
D<br />
D<br />
D<br />
D D D<br />
"Tänkt linje": y=kx+m<br />
DD (x<br />
2<br />
, y )<br />
2<br />
(x , y )<br />
i i<br />
(x , y )<br />
n n<br />
(x , y )<br />
1 1<br />
x<br />
Figur 5 Mätvärdena (x 1,y 1), (x 2,y 2),<br />
…, (xi,y i), … (x n,y n), tillsammans med<br />
den räta linjen y = k⋅x+m.<br />
y<br />
D<br />
DD<br />
D<br />
D<br />
D<br />
y = kx + m<br />
DD D D D<br />
(x , y )<br />
a a<br />
(x , y )<br />
c c<br />
(x , y )<br />
b b<br />
x<br />
Figur 6 Grafisk bestämning av räta<br />
linjens ekvation.<br />
© Nina Reistad 2005 43
Appendix 2 Mätvärdesanalys<br />
Tabell 1 Mätvärden från laborationen<br />
“Kretsprocesser”.<br />
N/varv t / s T / ºC<br />
0 0 22,4<br />
1 100 24,4<br />
2 194 26,1<br />
3 284 27,8<br />
4 372 29,5<br />
5 458 31,3<br />
6 541 32,9<br />
7 623 34,6<br />
8 703 36,2<br />
9 782 37,7<br />
10 860 39,2<br />
+ + + + + + + + + + +<br />
45<br />
40<br />
35<br />
30<br />
25<br />
20<br />
m=22<br />
15<br />
0 200 400 600 800 1000<br />
t / s<br />
o (38-25)<br />
(800-120) s<br />
C<br />
o punkt b<br />
punkt a<br />
C<br />
Figur 7 Temperaturen (T) i<br />
värmepumpens varma reservoar som<br />
funktion av tiden (t).<br />
Tabell 2 Benlängd och naturlig<br />
stegfrekvens för 8 individer.<br />
1,2<br />
1,1<br />
1,0<br />
Individ L0 / m T / s<br />
1 0,995 1,20<br />
2 0,990 1,12<br />
3 0,930 1,08<br />
4 0,880 1,21<br />
5 0,820 0,95<br />
6 0,900 0,93<br />
7 0,950 1,06<br />
8 0,820 0,96<br />
•<br />
•<br />
••<br />
•<br />
•<br />
0,9<br />
0,9 1,0 1,1<br />
T / s exp<br />
1,2 1, 3<br />
Figur 8 Pendelns period (T teo) som<br />
funktion av den naturliga stegperioden<br />
(Texp). Den heldragna linjen är<br />
Tteo = 0,23·T exp + 0,85. Den tunnare<br />
linjen har riktningskoefficienten 1.<br />
44<br />
•<br />
Exempel 1 Laborationen “Kretsprocesser”<br />
På laborationen ”Kretsprocesser” bestämde några teknologer samhörande värden<br />
av energimätarens varv (n) (ett mått på energiförbrukningen), tiden (t) och<br />
temperaturen i en värmepumps varma reservoar (T) (se Tabell 1).<br />
Vi vill pröva om det finns ett linjärt samband mellan tiden (t) och temperaturen<br />
(T) och avsätter därför motsvarande mätvärden i ett diagram (). Diagrammet visar<br />
att sambandet mellan temperaturen (T) och tiden (t) som pumpen har varit igång<br />
med god approximation kan skrivas i linjär form, dvs.<br />
T = k ⋅t<br />
+ m<br />
För att bestämma k och m drar vi i en rät linje så nära mätvärdena som möjligt. Vi<br />
bestämmer sedan riktningskoefficienten (k) genom att utnyttja triangeln i , dvs. vi<br />
avläser 2 punkter på linjen, t.ex.<br />
( t T ) = ( 120⋅<br />
s,<br />
25⋅<br />
° C)<br />
och ( t , T ) = ( 800⋅<br />
s,<br />
38⋅<br />
° C)<br />
a , a<br />
b b<br />
Riktningskoefficienten blir<br />
k =<br />
( Tb<br />
−Ta<br />
)<br />
( t − t )<br />
b<br />
a<br />
=<br />
( 38 − 25)<br />
⋅°<br />
( 800 -120)<br />
⋅<br />
C 13⋅<br />
° C<br />
= = 0,<br />
0191⋅<br />
° C/s<br />
s 680⋅<br />
s<br />
Konstanten (m) får vi genom att avläsa linjens skärningspunkt med y-axeln, vilket<br />
i praktiken motsvarar den temperaturer som rådde då värmepumpen startades,<br />
vårt fall är m = 22°C.<br />
Exempel 2 Jämförelse med en modell<br />
Biologiska system har en tendens till självoptimering. Ett exempel på detta är hur<br />
gående människor anpassar sin stegfrekvens så att energikostnaderna blir så små<br />
som möjligt. För att förstå varför utgår vi från perioden för en pendel<br />
T = 2 ⋅π<br />
⋅<br />
L<br />
g<br />
Nu kan vi inte betrakta benen som matematisk pendel. Benens massa är t.ex. inte<br />
koncentrerad till en punkt. För att ta hänsyn till detta inför vi en ”effektiv”<br />
benlängd L = a·L0, där a = 1/3 för en normal vuxen människa. I Tabell 2 finns<br />
resultat från mätningar av benlängden (L0) och den naturliga stegperioden (T) för<br />
8 friska studenter. Använd mätvärdena och pröva om modellen är rimlig.<br />
Lösning Vi börjar med att beräkna värden på stegperioden enligt formeln för<br />
pendelns period (Tteo). Därefter ritar vi ett diagram () där vi avsätter den<br />
teoretiska perioden (Tteo) som funktion av den experimentella perioden (Texp). Vi<br />
drar en rät linje så nära punkterna som möjligt och bestämmer linjens ekvation<br />
0, 23 exp 0,<br />
85 + ⋅ = T<br />
Tteo Om modellen exakt överensstämmer med de experimentella resultaten blir<br />
riktningskoefficienten 1. För individer med korta ben ger modellen lite för små<br />
värden på stegperioden och för individer med långa ben överskattar modellen<br />
stegperioden. Men denna avvikelse är i storleksordningen 5 %, vilket innebär att<br />
modellen är mycket bra.
Linjärisering<br />
Många samband mellan storheter är inte linjära. Då måste vi börja med att<br />
skriva om sambandet så att det blir linjärt, dvs. välja nya variabler. De nya<br />
variablerna kommer att vara funktioner av de gamla. Detta kallas för att<br />
linjärisera. Tabell 3 Belysningens<br />
avståndsberoende.<br />
Linjärisering kan gå till på flera olika sätt,<br />
R / m E / lux<br />
Utgå ifrån en intelligent gissning.<br />
Utnyttja logaritmfunktioner.<br />
Andra <strong>metoder</strong>.<br />
Vi ska illustrera den här tekniken via några exempel.<br />
Exempel 3 Linjärisering baserad på en intelligent gissning.<br />
Vi vill bestämma hur belysningen (E) varierar med avståndet (r) från en<br />
glödlampa. Vi mätte de båda storheterna med hjälp av en luxmeter och en linjal.<br />
I Tabell 3 återfinns de samhörande mätvärdena.<br />
Belysningen avtar med avståndet från glödlampan (rimligt?). Vi vill nu hitta ett<br />
funktionssamband mellan belysningen (E) och avståndet (r) från glödlampan. Vi<br />
börjar med att avsätta E som funktion av r i ett diagram (Figur 9). Funktionen är<br />
misstänkt lik E ~ 1/r n . Vi börjar därför med att gissa att n = 1, dvs.<br />
E = kontant·r -1 . För att pröva vår hypotes avsätter vi E som funktion av r -1 (Figur<br />
10). Om vårt antagande är riktigt borde vi få en rät linje vars riktningskoefficient<br />
är lika med konstanten i ovanstående samband. Diagrammet visar att vår hypotes<br />
var felaktig. Vi gör en ny gissning och antar istället att sambandet är<br />
1<br />
E = k ⋅<br />
2<br />
r<br />
där k är en konstant. För att pröva vår nya hypotes avsätter vi E som funktion av<br />
r -2 i ett nytt diagram (Figur 11). Antagandet ser ut att vara riktigt och vi kan nu<br />
bestämma konstantens värde. Vi börjar med att dra en rät linje så nära<br />
mätvärdena som möjligt (Figur 11). Därefter avläser vi 2 punkter på linjen, t.ex.<br />
⎛<br />
⎜<br />
⎜<br />
r<br />
⎝<br />
−2<br />
⎜ 1 ⎟<br />
−<br />
( 3,<br />
8⋅<br />
m , 200⋅<br />
lux)<br />
och , E = ( 15,<br />
0⋅<br />
m , 720⋅<br />
lux)<br />
1 2<br />
, E<br />
2 a ⎟ =<br />
⎜ 2 b ⎟<br />
a<br />
⎞<br />
⎟<br />
⎟<br />
⎠<br />
Riktningskoefficienten blir<br />
( Eb<br />
− Ea<br />
) ( 720 − 200)<br />
=<br />
⎞ ( 15,0 -3,8)<br />
⋅<br />
k =<br />
⎛<br />
⎜<br />
1 1<br />
− ⎟<br />
⎜ 2 2 ⎟<br />
⎝ rb<br />
ra<br />
⎠<br />
Funktionen är<br />
⎛<br />
⎜ r<br />
⎝<br />
b<br />
⎞<br />
⎟<br />
⎠<br />
⋅lux<br />
= 46⋅<br />
lux ⋅ m<br />
−2<br />
m<br />
1<br />
2<br />
E = k ⋅ ; där k = 46 lux ⋅ m<br />
2<br />
r<br />
2<br />
0,25 764<br />
0,30 550<br />
0,35 417<br />
0,40 328<br />
0,50 219<br />
0,60 158<br />
0,70 119<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
Figur 9 Belysningen (E ) som<br />
funktion av avståndet (r ).<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
+<br />
+<br />
+ +<br />
+ + + +<br />
0,0 0,2 0,4 0,6 0,8 1,0<br />
r / m<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
0 1 2 3 4 5<br />
r -1 / m -1<br />
Figur 10 Belysningen (E ) som<br />
funktion av avståndet (r -1 ).<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
punkt a<br />
+<br />
+<br />
++<br />
+<br />
+<br />
punkt b<br />
+<br />
(15,0-3,8) m -2<br />
+<br />
+<br />
+<br />
0 5 10 15 20<br />
r -2 / m -2<br />
Figur 11 Belysningen (E ) som<br />
funktion av avståndet (r -2 ).<br />
© Nina Reistad 2005 45
Appendix 2 Mätvärdesanalys<br />
Figur 12 Babianskallar av olika<br />
åldrar. 1: nyfödd, 2: ungdom, 3: vuxen<br />
hona, 4: vuxen hane.<br />
Figur 13 Kraniets längd som<br />
funktion av skallens längd för en<br />
grupp babianer. Data: Huxley 1932.<br />
46<br />
Potensfunktioner<br />
Metoden att gissa exponenter kan bli tidsödande, besvärlig och felaktig om<br />
exponenterna är stora och/eller icke-heltaliga. Det krävs en bättre metodik.<br />
En potensfunktion kan allmänt skrivas<br />
b<br />
u = a ⋅t<br />
(7)<br />
där a och b är konstanter. Vi kan linjärisera ovanstående funktion genom att<br />
logaritmera sambandet.<br />
b<br />
log u = log( a ⋅t<br />
) = log a + b ⋅log<br />
t<br />
Jämför ekvationen ovan med ekvationen för en rät linje<br />
log<br />
<br />
u = log<br />
<br />
a + b<br />
⋅log<br />
<br />
t<br />
(9)<br />
y m k x<br />
Det betyder att om vi avsätter log(u) som funktion av log(t) får vi en rät linje<br />
ur vilken konstanterna a och b kan bestämmas.<br />
Exempel 4 Babianers tillväxt<br />
Då djur som babianer växer förändras också kroppsformen. I figuren bredvid<br />
visas några babianskallar i olika åldrar. Det är tydligt att ansiktet växer mer än<br />
kraniets övriga delar. Diagrammet visar sambandet mellan ansiktets (y) och<br />
kraniets längd (x). Bestäm ett samband mellan x och y.<br />
Lösning Diagrammet ger ansatsen<br />
b<br />
y = a ⋅ x<br />
Vi linjäriserar enligt lg y = lg a + b ⋅ lg x . Två punkter i diagrammet ger<br />
2,<br />
20 −1,<br />
40<br />
b =<br />
= 3,<br />
81<br />
2,<br />
09 −1,<br />
88<br />
1−b<br />
lg( a/mm<br />
) = 2,<br />
20 − 3<br />
−5,<br />
762<br />
, 81<br />
-2,81<br />
⋅<br />
2,<br />
09<br />
=<br />
−5,<br />
762<br />
-2,81<br />
Parametern a = 10 mm = 1,73⋅10<br />
mm .<br />
-6<br />
(8)
Exempel 5 Linjärisering med hjälp av logaritmer<br />
Anta att sambandet mellan belysningen (E) och avståndet (r) från glödlampan (0)<br />
kan skrivas E = a·r b . Vi vill dels pröva antagandet och dels bestämma<br />
konstanterna a och b. Omskrivning av sambandet ovan ger lgE = lga + b⋅lgy. Vi<br />
beräknar nu lg(E /lux) samt lg(r /m) och utökar Tabell 3, se Tabell 4. Under<br />
förutsättning att sambandet är en potensfunktion (dvs. E = a·r b ) får vi alltid en rät<br />
linje om vi avsätter lg(E /lux) som funktion av lg(r /m), se .<br />
För att bestämma konstanterna a och b börjar med att i diagrammet (Figur 14) dra<br />
en linje som ligger så nära mätvärdena som möjligt. Därefter avläser vi två<br />
punkter på linjen som inte ligger för nära varandra,<br />
⎧lg<br />
Punkt 1:<br />
⎨<br />
⎩lg<br />
( r1<br />
/ m)<br />
=<br />
( E / lux)<br />
För riktningskoefficienten gäller<br />
lg<br />
b =<br />
1<br />
−0,<br />
11 ⎧lg<br />
Punkt 2 : ⎨<br />
= 2,<br />
0 ⎩lg<br />
( E / lux)<br />
− lg(<br />
E1<br />
/ lux)<br />
2,<br />
8 − 2,<br />
0<br />
=<br />
lg(<br />
r / m)<br />
− lg(<br />
r / m)<br />
( − 0,<br />
56)<br />
− ( − 0,<br />
11)<br />
( r2<br />
/ m)<br />
=<br />
( E / lux)<br />
2 = −<br />
2<br />
1<br />
2<br />
−0,<br />
56<br />
=<br />
1,<br />
78<br />
−b<br />
Parametern a får vi ur sambandet ( a / lux ⋅ m ) = lg(<br />
E / lux)<br />
− b ⋅ lg(<br />
r / m)<br />
Dvs.<br />
lg<br />
−b<br />
( a / lux ⋅ m ) = 2,<br />
0 − ( −1,<br />
78)(<br />
⋅ − 0,<br />
11)<br />
= 1,<br />
80<br />
a lg<br />
= 10<br />
−b<br />
lux ⋅ m<br />
-b ( a / lux⋅m<br />
) 1,<br />
80<br />
= 10 = 63,<br />
7<br />
2,<br />
8<br />
lg 1<br />
1<br />
Sambandet mellan belysningen (E) och avståndet från lampan (r) är<br />
⎪⎧<br />
1,8<br />
b a= 64 lux ⋅m<br />
E = a ⋅ r ; där ⎨<br />
⎪⎩ b = −1,<br />
80<br />
Det finns inget origo i en logaritmisk skala. Det innebär att linjens<br />
skärningspunkt med y-axeln inte betyder någonting. Vi måste bestämma<br />
konstanten (lg(a)) genom att avläsa en valfri punkt i diagrammet (i exemplet ovan<br />
(r1, E1) = (-0,11, 2,0)).<br />
Notera beteckningarna i tabellhuvudet samt på diagramaxlarna. Det går inte att<br />
“logaritmera en meter”, dvs. alla argument skall vara enhetslösa 1 . Vi måste<br />
“dividera bort” enheten från storheten innan vi logaritmerar. Om vi utgår från att<br />
storhet = mätetal·enhet gäller,<br />
E<br />
2,<br />
0 lux 1<br />
⎛ E<br />
2,<br />
0 lg 1 ⎞<br />
E 1 = ⋅ ⇔ = ⇔ ⎜ ⎟ = lg<br />
lux ⎝ lux ⎠<br />
( 2,<br />
0)<br />
= 0,<br />
30<br />
1 Gäller alla standardfunktioner, sin(argument), cos(argument), e argument , …<br />
,<br />
Tabell 4 Belysningens<br />
avståndsberoende.<br />
r / m E / lux lg(r/m) lg(E/lux)<br />
0,25 764 -0,60 2,89<br />
0,30 550 -0,52 2,74<br />
0,35 417 -0,46 2,62<br />
0,40 328 -0,40 2,52<br />
0,50 219 -0,30 2,34<br />
0,60 158 -0,22 2,20<br />
0,70 119 -0,16 2,08<br />
3,0<br />
2,8<br />
2,6<br />
2,4<br />
2,2<br />
+ + + +<br />
punkt 2<br />
+ + + +<br />
2,0<br />
-(0,56) -(- 0,11)<br />
1,8<br />
-0,7-0,6-0,5-0,4-0,3-0,2 -0,1<br />
10 log(r / m)<br />
punkt 1<br />
Figur 14 Linjärisering av<br />
belysningens avståndsberoende.<br />
© Nina Reistad 2005 47
Wtot<br />
ln(W /J)<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
Appendix 2 Mätvärdesanalys<br />
Tabell 5 Dämpad svängning.<br />
t / s y / m v / (m/s) W / J ln(W / J)<br />
0,00 0,28 0,00 0,559 -0,582<br />
0,19 0,21 -0,67 0,539 -0,618<br />
0,51 -0,08 -0,93 0,478 -0,738<br />
0,94 -0,23 0,36 0,442 -0,817<br />
1,37 0,10 0,79 0,383 -0,959<br />
1,80 0,20 -0,40 0,365 -1,008<br />
2,22 -0,10 -0,68 0,302 -1,196<br />
2,65 -0,17 0,40 0,286 -1,252<br />
3,07 0,10 0,59 0,245 -1,405<br />
3,49 0,15 -0,38 0,232 -1,459<br />
3,91 -0,09 -0,52 0,193 -1,646<br />
4,33 -0,13 0,35 0,182 -1,705<br />
4,75 0,09 0,47 0,168 -1,783<br />
5,16 0,12 -0,32 0,153 -1,872<br />
5,58 -0,08 -0,42 0,134 -2,011<br />
5,60 -0,11 0,29 0,128 -2,053<br />
6,41 0,07 0,37 0,103 -2,269<br />
6,83 0,10 -0,26 0,105 -2,253<br />
7,25 -0,06 -0,34 0,084 -2,483<br />
7,66 -0,09 0,24 0,087 -2,447<br />
8,08 0,06 0,30 0,069 -2,674<br />
8,50 0,08 -0,22 0,068 -2,695<br />
8,91 -0,05 -0,27 0,054 -2,914<br />
9,33 -0,07 0,19 0,053 -2,938<br />
9,75 0,05 0,24 0,044 -3,111<br />
0<br />
0 2 4 6 8 10<br />
t /s<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
−2.5<br />
−3<br />
Figur 15 Energin (W) som funktion<br />
av tiden (t) för en dämpad svängning.<br />
−3.5<br />
0 2 4 6 8 10<br />
t /s<br />
48<br />
• ← punkt 1 = (2,0 s; −1,1)<br />
punkt 2 = (8,0 s; −2,6) →<br />
Figur 16 Energins (W) tidsberoende<br />
(t).<br />
•<br />
Exponentialfunktioner<br />
En exponentialfunktion kan allmänt skrivas<br />
där a och b är konstanter. Vi linjäriserar funktionen<br />
u<br />
b⋅t<br />
= a ⋅ e<br />
(10)<br />
b⋅t<br />
( a ⋅ e ) = ln a + b ⋅ t ⋅ ln e = ln a + b ⋅t<br />
ln u = ln<br />
(11)<br />
Jämför ekvationen ovan med ekvationen för en rät linje<br />
ln u = ln a + b<br />
⋅t<br />
(12)<br />
y m k⋅<br />
x<br />
I ett diagram med ln(u) som funktion av t får vi en rät linje ur vilken<br />
konstanterna a och b kan bestämmas, exempelvis är linjens<br />
riktningskoefficient (k) lika med exponenten (b).<br />
Exempel 6-1 Linjärisering av exponentialfunktioner<br />
En fjäder med fjäderkonstanten 378 N/m är belastad med massan 1,0 kg. Vi sätter<br />
massan i svängning och mäter dess läge (y) och hastighet (v) som funktion av<br />
tiden (t). Använd mätvärdena i Tabell 5 och bestäm systemets<br />
sönderfallskonstant.<br />
Lösning Vi börjar med att för varje tidpunkt (t) beräkna systemets totala energi<br />
(W)<br />
1 2 1<br />
W = ⋅ k ⋅ y + ⋅ m ⋅ v<br />
2 2<br />
2<br />
Därefter ritar vi ett diagram där vi avsätter den totala energin som funktion av<br />
tiden (Figur 15). Energin för en dämpad svängning avtar exponentiellt med tiden<br />
enligt<br />
−γ<br />
⋅t<br />
W = W0<br />
⋅ e<br />
Vi vill bestämma sönderfallskonstanten (γ ) och linjäriserar därför sambandet<br />
ln W = lnW0<br />
− γ ⋅t<br />
Vi beräknar ln(W ) och utökar tabellen (Tabell 5). Därefter avsätter vi ln(W / J)<br />
som funktion av t /s i ett diagram (Figur 16). I diagrammet drar vi en rät linje som<br />
ansluter så nära mätvärdena som möjligt. För att bestämma riktningskoefficienten<br />
avläser vi två punkter i diagrammet, (2,0 s; -1,1) och (8,0 s; -2,6).<br />
Sönderfallskonstanten får vi nu enligt<br />
γ<br />
( − , 6)<br />
− ( −1,<br />
1)<br />
( 8,<br />
0 − 2,<br />
0)<br />
s<br />
2 −1,<br />
5 -1<br />
−1<br />
= = s = −0,<br />
25 s<br />
6<br />
Riktningskoefficienten är negativ, vilket visar att energin minskar med tiden.<br />
Sönderfallskonstanten är således 0,25 s -1 .
Sammanfattning<br />
Några vanliga funktioner och deras linjärisering<br />
y = k ⋅ x + m x y k m<br />
u = a ⋅ t<br />
b<br />
u = a ⋅ e<br />
b⋅t<br />
u = a ⋅10<br />
u =<br />
u =<br />
b⋅t<br />
1<br />
( a + b ⋅ t)<br />
t<br />
( a + b ⋅ t)<br />
Linjära samband<br />
lg t<br />
ln t<br />
t<br />
t<br />
t<br />
t<br />
t<br />
1<br />
t<br />
u<br />
lg b b<br />
ln u<br />
lg u<br />
ln u<br />
lg u<br />
ln u<br />
b ⋅ lg e<br />
b<br />
b<br />
b ⋅ ln10<br />
u = a ⋅ t<br />
lg a<br />
1<br />
b a<br />
u<br />
1<br />
a b<br />
u<br />
ln a<br />
lg a<br />
ln a<br />
y = k ⋅ x + m Grafisk teknik Numerisk teknik (mkm)<br />
Riktningskoefficient<br />
yb<br />
− ya<br />
k =<br />
xb<br />
− xa<br />
Konstant m = yc<br />
− k ⋅ xc<br />
Litteratur<br />
Cooke, C., An introduction to<br />
Experimental <strong>Physics</strong>., UCL Press,<br />
1996.<br />
Kirkup, L., Experimental Metods: an<br />
introduction to the analysis and<br />
presentation of data., John Wiley &<br />
Sons., 1994.<br />
Squires, G. L., Practical <strong>Physics</strong>: 2/e.,<br />
McGraw-Hill Lim., 1976.<br />
Jiang, H., Whitlow, H.J., Östling, M.,<br />
Neimi, E., d’Heurle, F.M. and<br />
Petersson. C.S., J. Appl. Phys. 65,<br />
567, 1989.<br />
k<br />
n<br />
∑<br />
i<br />
i=<br />
1<br />
=<br />
n<br />
∑<br />
x<br />
x<br />
i<br />
i=<br />
1<br />
m = y − k ⋅<br />
⋅<br />
( y − y )<br />
⋅<br />
i<br />
( x − x )<br />
i<br />
x<br />
© Nina Reistad 2005 49