S T A T Y K A
S T A T Y K A
S T A T Y K A

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
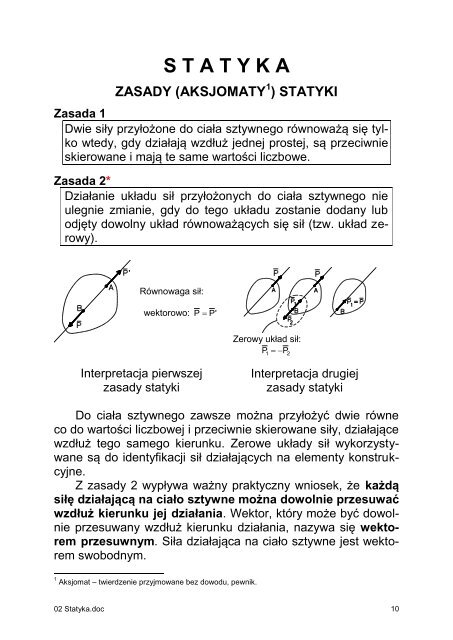
S T A T Y K AZASADY (AKSJOMATY 1 ) STATYKIZasada 1Dwie siły przyłożone do ciała sztywnego równoważą się tylkowtedy, gdy działają wzdłuż jednej prostej, są przeciwnieskierowane i mają te same wartości liczbowe.Zasada 2*Działanie układu sił przyłożonych do ciała sztywnego nieulegnie zmianie, gdy do tego układu zostanie dodany lubodjęty dowolny układ równoważących się sił (tzw. układ zerowy).Równowaga sił:wektorowo:P P'Zerowy układ sił:P 1 P 2Interpretacja pierwszejzasady statykiInterpretacja drugiejzasady statykiDo ciała sztywnego zawsze można przyłożyć dwie równeco do wartości liczbowej i przeciwnie skierowane siły, działającewzdłuż tego samego kierunku. Zerowe układy sił wykorzystywanesą do identyfikacji sił działających na elementy konstrukcyjne.Z zasady 2 wypływa ważny praktyczny wniosek, że każdąsiłę działającą na ciało sztywne można dowolnie przesuwaćwzdłuż kierunku jej działania. Wektor, który może być dowolnieprzesuwany wzdłuż kierunku działania, nazywa się wektoremprzesuwnym. Siła działająca na ciało sztywne jest wektoremswobodnym.1 Aksjomat – twierdzenie przyjmowane bez dowodu, pewnik.02 Statyka.doc 10
Zasada 5 (zasada zesztywnienia)*Równowaga sił działających na ciało odkształcalne nie zostanienaruszona przez zesztywnienie tego ciała.Na podstawie tej zasady przyjmuje się, że układ sił działającychna ciało odkształcalne będące w równowadze spełniate same warunki równowagi, które dotyczą działania układu siłna ciało sztywne. Zasada zesztywnienia ma więc ogromne znaczeniepraktyczne w wytrzymałości materiałów, traktowanej jakomechanika ciała odkształcalnego.Zasada 6 (zasada oswobodzenia od więzów)*Każde ciało nieswobodne można myślowo oswobodzić odwięzów, zastępując przy tym ich działanie odpowiednimi reakcjami.Dalej ciało to można rozpatrywać jako ciało swobodne,podlegające działaniu sił czynnych (obciążeń) orazsił biernych (reakcji).UWAGA: zasady nr 2, 5 i 6 (oznaczone *) zostały wyróżnioneze względu na ich znaczenie w wytrzymałości materiałów(mechanice ciała odkształcalnego).02 Statyka.doc 12
UKŁADY SIŁ W STATYCEPłaskie układy siłPrzestrzenne układy siłZbieżne układy siłRównoległe układy siłDowolne układy siłWszystkie siły układu działającego na ciałosztywne leżą w jednej płaszczyźnie.Siły układu działające na ciało sztywnemają dowolne kierunki w przestrzeni.Linie działania wszystkich sił przecinają sięw jednym punkcie.Linie działania wszystkich sił są do siebierównoległe.Linie działania wszystkich sił mają dowolnekierunki działaniaYXPłaski układ sił zbieżnychYPłaski układ sił równoległychYXXPłaskiukład sił dowolnieskierowanych (dowolnych)YZXPrzestrzennyukład sił zbieżnychYZXPrzestrzennyukład sił równoległychZYXPrzestrzennyukład sił dowolnie skierowanych(dowolnych)02 Statyka.doc 13
PŁASKIE ZBIEŻNE UKŁADY SIŁW płaskim układzie sił zbieżnych kierunki działania siłprzyłożonych do ciała sztywnegoleżą w jednej płaszczyźniei przecinają się w jednym punkcie.Wypadkową układu sił zbieżnych nazywa się jedną siłę (wektor)zastępującą działanie danego układu sił.Dowolny płaski układ n sił P 1,P 2,...., Pnprzyłożonychdo punktu O ciała sztywnego można zastąpićsiłą wypadkową R równą sumie wektorowej(geometrycznej) tych sił i przyłożoną również do punktu O.R P1 P2... P2Pi.i1inP3P 1P 1P4OUkład sił działających na ciało sztywneP4OP 1P3P12R = PP1231234Wypadkowa wyznaczona za pomocąmetody równoległobokuP 2P 2P4OP 2P3Płaski układ sił zbieżnychP1P 2OP3RP4Wypadkowa wyznaczonaza pomocą wieloboku sił02 Statyka.doc 14
Siły zbieżneP 1,P 2,...., Pndziałające w jednej płaszczyźnie znajdująsię w równowadze, gdy wektorsiły wypadkowej R równa się zeru.Ri n i1Pi 0ANALITYCZNE WYZNACZANIE WYPADKOWEJYPP YOP XXRzuty wektora P na osie X i Y: P X = Pcos, P Y = PsinP X , P Y – składowe siły P.Gdy znane są składowe, wartość siły i jej kierunekwyznacza się z zależności:2 2P P x P Y ,PXPYcos , sin .P PUKŁAD RÓWNAŃ RÓWNOWAGIDLA PŁASKIEGO UKŁADU SIŁ ZBIEŻNYCHW ZAPISIE ANALITYCZNYM:RXini1PiX 0,RYini1PiY 002 Statyka.doc 15
PŁASKIE UKŁADY SIŁ RÓWNOLEGŁYCHPŁASKI UKŁAD SIŁ O TYCH SAMYCH ZWROTACH(zgodnie skierowanych)Na ciało sztywne działajądwie siły równoległeP1i P 2 .Dwie równoległe, zgodnie skierowane siły P1i P 2 przyłożonedo punktów A i B ciała sztywnego można zastąpić siłą wypadkowąW równą sumie tych sił, równoległą do nichi zgodnie z nimi skierowaną. Linia działania wypadkowej Wdzieli wewnętrznie odcinek AB odwrotnie proporcjonalnie dowartości liczbowych sił P1i P 2 .W = P 1 + P 2 ,P 1 OBP OA.PŁASKI UKŁAD SIŁ O PRZECIWNYCH ZWROTACH(przeciwnie skierowanych)OW = P 1-P 2AP 1P 2B2Dwie równoległe, przeciwnie skierowanesiły P1i P 2 ( P 1 > P 2 ) przyłożonedo punktów A i B ciała sztywnegomożna zastąpić siłą wypadkowąW równą różnicy wartościliczbowych tych sił, równoległą do nich i skierowaną zgodnie zsiłą o większej wartości liczbowej. Linia działania wypadkowejW dzieli zewnętrznie odcinek AB odwrotnie proporcjonalnie dowartości liczbowych sił P1i P2i leży po stronie większej siły.W = P1- P 2 ,AO P 2BO P.102 Statyka.doc 16
MOMENT SIŁY WZGLĘDEM PUNKTUM 0rP0hAMoment siły P względempunktu 0 to wektor, któregowartość bezwzględna równajest iloczynowi wartości liczbowejsiły P i ramienia tejsiły względem punktu 0.Wektorowo:M 0 r P Skalarnie: M 0 = P h (h – ramię).Jednostka momentu: [M 0 ] = Nm (niuton razy metr)Znak momentu: reguła prawej dłoni:ANALITYCZNE WYZNACZANIE MOMENTU:YPyPyA(x, y)PxhOxXM0 Py x Px y PhMoment siły względem punktu jest równy zeru, gdy: siła jest równa zeru, linia działania siły przechodzi przez dany punkt (ramię=0).02 Statyka.doc 17
PARA SIŁ, MOMENT PARY SIŁZałożenie: P 1 = P 2Zerowy układ siłP 12P P 2P 1Układ dwóch sił równoległych, skierowanych w przeciwnychkierunkach, o równych modułach, nazywa się PARĄ SIŁ.Odległość między siłami – ramię pary sił.Siły tworzące parę nie mają wypadkowej (P 1 = P 2 ),ale i nierównoważące się, gdyż nie działają wzdłużjednego kierunku – nie są zerowym układem sił.Niezrównoważona para sił działającna ciało sztywne powoduje jego obrót.MOMENT PARY SIŁ – wektor,którego wartość bezwzględna(moduł) równa jest iloczynowiwartości liczbowej jednej z siłpary oraz ramienia tej pary:M = Pa.Moment sił tworzących parę względem dowolnego punktu:Oh2h1aP090PMO MO P h1MMOO P haPaM P h Ph2102 P (h1Z h2Para siłP) P a M.Suma momentów sił tworzących parę względem dowolnegopunktu płaszczyzny w której leży para sił, równajest MOMENTOWI DANEJ PARY SIŁ.02 Statyka.doc 18
RÓWNOWAŻNE UKŁADY SIŁRównoważne układy sił to układy, które wywierająjednakowe działania na ciało sztywne.WYPADKOWA – siła równoważna układowi sił.Pary sił o tej samej płaszczyźnie działaniai o równych momentach są sobie równoważne.Ponieważ wywierają one na ciało sztywnejednakowe działanie – można je wzajemnie zastępować.Parę sił można dowolnie przesuwać w jej płaszczyźnie działania,zachowując jedynie niezmieniony moment. Jakopunkt przyłożenia wektora momentu pary sił M możnaobrać dowolny punkt rozpatrywanej płaszczyzny.MOMENT M PARY SIŁ JEST WEKTOREM SWOBODNYM.Gdy na ciało sztywne działa n par sił leżących w jednejpłaszczyźnie, to pary te można zastąpić parą wypadkowąo momencie równym sumie momentów poszczególnych par.i nM ii1M .WARUNEK RÓWNOWAGI PAR SIŁDZIAŁAJĄCYCH W PŁASZCZYŹNIEAby pary sił działające na ciało sztywne w jednej płaszczyźnieznajdowały się w równowadze, suma momentów tych parmusi się równać zeru.i n i1Mi 002 Statyka.doc 19
PŁASKIE UKŁADYSIŁ DOWOLNIE SKIEROWANYCHZastępowanie układu sił działających na ciało sztywne przezprostszy, równoważny układ sił, nazywa sięREDUKCJĄ UKŁADU SIŁ.REDUKCJA PŁASKICH UKŁADÓW SIŁ1. Płaski układ sił zbieżnych redukcja do siły wypadkowej.2. Płaski układ sił równoległych zgodnie skierowanych redukcja do siły wypadkowej.3. Płaski układ sił równoległych przeciwnie skierowanych redukcja do siły wypadkowej oraz momentu pary sił.REDUKCJA POJEDYNCZEJ SIŁYW PŁASKIM UKŁADZIE SIŁ DOWOLNYCHPZerowy układ siłPPM 0= PhPAP0O 90A0O 90AhhREDUKCJA PŁASKICH UKŁADÓW SIŁ DOWOLNYCHZSiły dowolnie skierowane,leżące w jednej wspólnejpłaszczyźnie, redukuje siędo układu najprostszego,czyli wypadkowej orazpary sił.-PM 0PP0O 90APh02 Statyka.doc 20
Siłę P przyłożoną do dowolnego punktu A ciała sztywnegomożna zastąpić równą jej siłą przyłożoną do dowolnego punktuO tego ciała, dodając jednocześnie parę sił o momencie równymmomentowi danej siły P względem punktu O.M 0= PhAP=P0O 90AhPunkt O – biegun redukcji, środek redukcji.Biegunem (środkiem) redukcji może byćdowolny punkt sztywnego ciała.Każdy układ sił przyłożonych do ciała sztywnego o kierunkachdziałania leżących w jednej płaszczyźnie, równoważnyjest (może być zastąpiony) układowi złożonemu z jednejsiły wypadkowej R oraz pary sił o momencie M O , przyłożonychdo dowolnego punktu O ciała, zwanego biegunemredukcji. Wypadkowa R równa jest sumie wektorowejwszystkich sił i nazywa się wektorem głównym układu sił,moment M O równy jest sumie momentów wszystkich danychsił względem punktu O i nazywa się momentemgłównym względem bieguna redukcji O.in R P i M i1iinO M Oi1Wektor główny R nie zależy od wyboru bieguna redukcji O.Moment główny M zależy od wyboru bieguna redukcji O.OWektorowy zapis redukcji płaskiegodowolnego układu sił.02 Statyka.doc 21
Analityczny zapis redukcji dowolnego układu sił:M OYP A 1 2 Y'PA 2 1Pyi PiRO'y i A Pi Axi3P 3x iOX'Xin R P i R X P Xi , R i1i1iininY P Yi1MOi PYi xiPXi yiinM M M P x P y iO M Oi1Oini1Oiini1YiiXiicosRRX,sin RyRZMIANA BIEGUNA REDUKCJI Wektor główny R nie zmienia sięprzy zmianie bieguna redukcji. Moment główny MOzmienia sięwraz ze zmianą położenia bieguna redukcji.M OOY'YRXO'RX'M O'Redukcja względem punktu O Redukcja względem punktu O’02 Statyka.doc 22
REDUKCJA PŁASKIEGO UKŁADU SIŁDO JEDNEJ SIŁY WYPADKOWEJW ogólnym przypadku układ sił działającychna ciało sztywne można zredukować do wypadkowej Roraz momentu pary sił M .ZAŁOŻENIE: R Pi 0i1W przypadku gdy suma wektorowa płaskiego układu siłP 1,P 2,...., Pndziałającego na ciało sztywne jest różna od zera,to układ ten można zastąpić jedną siłą wypadkową równąwektorowi głównemu R .OinM 0RRRO=O090C=O090CRhhWynik redukcji płaskiegoukładu siłM0h RPunkt C należy odmierzać w takim kierunku, aby znak otrzymanejpary sił był zgodny z kierunkiem M .REDUKCJA PŁASKIEGO UKŁADU SIŁDO MOMENTU WYPADKOWEGOZAŁOŻENIE: R Pi 0i1W przypadku gdy wektor główny R płaskiego układu sił jestrówny zeru, siły te można zastąpić jedną parą sił o momencierównym sumie momentów tych sił względem dowolnego punktupłaszczyzny.in M O M Oi .i1Wypadkowa danegoukładu siłinO02 Statyka.doc 23
===REDUKCJA PŁASKIEGODOWOLNEGO UKŁADU SIŁDowolny płaski układ sił(siły skupione, momenty)YXRedukcjado wektora głównego Ri momentu głównego M(O – biegun redukcji,dowolny punktpłaszczyzny XY)OOM 0RRRORh=M /RORedukcja do jednej siłyOR02 Statyka.doc 24
Redukcja przestrzennego układu sił do skrętnikaPrzestrzenny układ sił:Przestrzenny układ sił zredukowanydo siły osiowej i momentu skręcającego(skrętnika):SKRĘTNIK:02 Statyka.doc 25
RÓWNANIA RÓWNOWAGIDLA PŁASKIEGO UKŁADU SIŁAby dowolny płaski układ sił był w równowadze(nie wywoływał ruchu), wektor główny oraz momentgłówny tego układu muszą być równe zeru.Ri n i1Pi 0MOi n i1MOi 0 .Zapis algebraiczny (dwa równania rzutów sił, jedno równaniemomentów):i ni1i n i1i n i1P Xi 0 , PYi 0 , MOi 0Równania rzutów mogą zostać zastąpione równaniami momentówwzględem innych punktów.WARIANT 1:Równania równowagi składają się z trzech równań momentówP nP 1A 1 A A2CBA nA 3P 2P3i n i1i n i1i n i1MMMAi Bi Ci WARUNEK: punkty A, B i C nie mogą leżeć na jednej prostej.WARIANT 2:Równania równowagi składają się z dwóch równań momentóworaz jednej sumy rzutów sił.i n i1Pxi 0i n i1MAi 0i n i1MBi WARUNEK: dowolna oś X nie może być prostopadłado prostej łączącej punkty A i B.000002 Statyka.doc 26
REDUKCJA PŁASKIEGOUKŁADU SIŁ RÓWNOLEGŁYCHUkład sił równoległych P 1 , P 2 , …, P n ,przyłożonych do punktów A 1 , A 2 , …, A n ciała sztywnego.YRP 1AOA 12P2x 1x2xxn-1AAn-1Pn-1AnPnXxnWypadkowa sił:Zapis wektorowyZapis skalarnyin R P i R i1ii nP i1Dla sił o zwrocie przeciwnym niż na powyższym rysunku należyprzyjąć znak „–”.Wyznaczenie linii działania wypadkowej R:suma momentów wszystkich sił względem punktu OR xi ni1P x x ixini1PxR xiinPxi1ini1P xxiW przypadku, gdy R = 0 układ nie ma wypadkowej i jest równoważnyparze sił o momencieMOini1MOiini1P xii02 Statyka.doc 27
RÓWNANIA RÓWNOWAGI DLA PŁASKIEGOUKŁADU SIŁ RÓWNOLEGŁYCH:Suma rzutów sił na oś równoległą do kierunku działania sił:ini ni1R Pi Piy0,i1Suma momentów względem dowolnego punktu O:MinO i1MOi 0 .W płaskim układzie sił równoległych występują dwie niewiadomewielkości.Równanie sumy rzutów sił można zastąpić równaniem momentów.A, B – dowolne punkty nie leżące na prostejrównoległej do kierunku działania sił, wówczas:i n i1MA 0i n i1MB 002 Statyka.doc 28
SIŁY ROZŁOŻONE – OBJĘTOŚCIOWE,POWIERZCHNIOWE I LINIOWESiły objętościowe (masowe) – ciężar (siły grawitacji).Siły powierzchniowe (CIŚNIENIE).Siły rozłożone wzdłuż linii:0Yxq(x)dxx CdxLQq(x)XIntensywnośćobciążenia ciągłego q:wymiar [q]:dQ=q(x)dxQLq(x)dx0Siłą Q zastępuję działanie obciążenia ciągłego rozłożonegona odcinku o długości L – jest to wypadkowa obciążeniaciągłego. Punkt przyłożenia obciążenia zastępczegoQ wyznacza się z sumy momentów względem 0:LM 0 Q xC x q(x)dx 0 →0xcLNmx q(x)dx0QPRZYKŁADY:q=constF=qLLx C =0,5LLqF=1/2 qLLx C=2/3LLx C=1/3Lq 212 1q1qq - qLLL02 Statyka.doc 29
Warunki równowagi dla płaskich układów siłUkład siłWarunki równowagiZbieżny układ sił1. nP xii1n02. P 0i1yin1. P0; yiM Oii1 i1n0(0 – dowolny punkt)Układ sił równoległychUkład siłdowolnie skierowanychn2. M0, AiM Bii1 i1n0(A, B – dowolne punkty nie leżące na prostejrównoległej do kierunku działania sił)n1. Pxi0, Pyi0,i1ni1(0 – dowolny punkt)nni1M2. MAi0, MBi0,Mi1ni1ni1ni1Oi0Ci0(A, B, C – nie mogą leżeć na jednej prostej)n3. Pxi0, MAi0,MBi0i1ni1(Oś X nie może być prostopadła do prostej AB)02 Statyka.doc 30
Warunki równowagi dla przestrzennych układów siłUkład siłYXZZbieżny układ siłYXZRównoległy układ siłWarunki równowagi1. nP xii1n02. P 0i1nyi3. P 0i11. zinP yii1n02. M 0i1nxi3. M 0i1(dotyczy sił równoległych w kierunku osi Y)zi1. nP xii10ZYUkład siłdowolnie skierowanychX2. 3. 4. nP xii1nP xii1nM Xii1nM Yii15. 0000nM Zii16. 002 Statyka.doc 31
INTERPRETACJA ZNAKÓWW RÓWNANIACH STATYKIW rozwiązywaniu zadań z mechaniki (oraz wytrzymałości materiałów)nie zawsze można prawidłowo przewidzieć kierunki siłzewnętrznych biernych (reakcji). Ponieważ równania statyki mającharakter praw fizycznych, w oparciu o swoją wiedzę i doświadczenie,można dokonać założeń o kierunkach tych reakcji.Po rozwiązaniu układu równań statyki poczynione założenia sąweryfikowane: Gdy otrzymane wartości sił są ze znakiem „+”: założenie byłoprawidłowe. Gdy otrzymane wartości sił są ze znakiem „–”: założenie byłonie prawidłowe. Prawdziwy kierunek sił jest przeciwny do założonego.ZAGADNIENIASTATYCZNIE WYZNACZALNEI STATYCZNIE NIEWYZNACZALNE– Płaski układ sił dowolnie skierowanych – 3 równania statyki.– Przestrzenny układ sił dowolnie skierowanych – 6 równaństatyki.W statyce ciała sztywnego przy zadanych obciążeniachposzukuje się reakcji podpór.STATYKA ZAJMUJE SIĘ ZAGADNIENIAMI STATYCZNIEWYZNACZALNYMI, DO ROZWIĄZANIA KTÓRYCHWYSTARCZAJĄ RÓWNANIA STATYKI.Płaskie układy sił dowolnie skierowanych – 3 niewiadome.Przestrzenne układy sił dowolnie skierowanych – 6 niewiadomych.Gdy w zadaniu liczba niewiadomych przekroczy liczbę równaństatyki – ZADANIE STATYCZNIE NIEWYZNACZALNE, dlarozwiązania którego trzeba odstąpić od modelu ciała sztywnego WYTRZYMAŁOŚĆ MATERIAŁÓW.02 Statyka.doc 32
T A R C I EModel ciał idealnie gładkich – siły reakcji są prostopadłedo powierzchni.RTNPGP – siła zewnętrzna czynna (obciążenie),G – siła zewnętrzna czynna (ciężar),R – reakcja,N – składowa normalna reakcji,T – siła tarcia.CIAŁO ZNAJDUJE SIĘ W RÓWNOWADZEGDY SIŁA P < T LUB P = T.Gdy P > T – ciało zacznie się porusza (ślizgać).Wartość siły tarcia jest ograniczona i nie może przekroczyćpewnej maksymalnej wartości.PRAWA TARCIA COULOMBA:1. Siła tarcia posuwistego leży w płaszczyźnie poruszających sięciał i jest skierowana w kierunku możliwego przesuwu ciała.Siła tarcia wynosi 0 T T max . Wartość T max siła tarcia osiągaw chwili utraty równowagi.2. Siła tarcia jest niezależna od pola powierzchni stykających sięciał. Zależy jedynie od materiału, jego właściwości fizycznych,temperatury, smarowania, wilgotności itp.3. Maksymalna siła tarcia jest proporcjonalna do wielkościreakcji normalnej.02 Statyka.doc 33
Dla ciała w spoczynku:Dla ciała w ruchu:T N.T = k N.Maksymalna siła tarcia: T = N, – współczynnik tarciaspoczynkowego (statycznego). Dla ciała w ruchu (ślizgającegosię): k – współczynnik tarcia kinetycznego. Ponieważ > k ,tarcie spoczynkowe jest większe od tarcia kinetycznego.Rozwiązywanie zagadnień równowagi (statyka) z uwzględnieniemtarcia polega na określaniu granicznych wartościsił utrzymujących ciało w równowadze.Rodzaje tarcia:– tarcie suche,– tarcie półsuche (półpłynne),– tarcie płynne (smarowanie zmniejszające opór tarcia).02 Statyka.doc 34
MASZYNY PROSTE1. DŹWIGNIA JEDNOSTRONNAQRaPbQb = PaPrzykłady: taczka, gilotyna.2. DŹWIGNIA DWUSTRONNARaQ P .bQPabPa = Qb.Przykłady: waga, pompa.3. KOŁOWRÓTr 1Rr 2QP4. ŚRUBA5. KORBOWÓD6. RÓWNIA POCHYŁA7. WIELOKRĄŻKIPr 1 - Qr 2 = 0, Pr 1 = Qr 2 .02 Statyka.doc 35
ŚRODEK CIĘŻKOŚCISiły ciężkości (siły przyciągania) – szczególny przypadek sił objętościowychrównoległych (wymiary ciała znikomo małe w porównaniuz promieniem kuli ziemskiej).Środkiem ciężkości ciała materialnego (bryły) nazywa się granicznepołożenie środka sił równoległych, które są siłami ciężkościposzczególnych cząstek bryły na jakie myślowo zostałabryła podzielona, gdy największa z tych cząstek dąży do zera.ŚRODEK PRZESTRZENNEGO UKŁADUSIŁ RÓWNOLEGŁYCHZx3xcx2x 10PA1P1 2y y y y1cA22CA33yXDla dowolnej liczby n sił równoległych P i , przyłożonychWP 3w punktach A i (x i , y i ) wypadkowaWi nP ii1Moment wypadkowej W(x c , y c ) względem osi Y jest równy sumiemomentów sił składowych:W xc Pi n1 x1 P2 x2... Pn xn Pn xn.i1Współrzędna punktu przyłożenie wypadkowej W wynosiPi xixc .Pi.02 Statyka.doc 36
Z równań momentów względem osi X oraz Z otrzymuje sięycPi yiPizcPi ziPPunkt C – środek sił równoległych.Siły P i – siły ciężkości ŚRODEK CIĘŻKOŚCI CIAŁĄNCIĘŻAR WŁAŚCIWY: [ ] 3 .mCiężar = masa przyspieszenie ziemskie g → . g.kgGĘSTOŚĆ CIAŁA: [ ] 3 .mPRZYPADKI SZCZEGÓLNE– Środek ciężkości brył.– Środek ciężkości powierzchni.– Środek ciężkości figur płaskich.– Środek ciężkości linii.FIGURY PŁASKIEGrubość figury = 0, objętość pole powierzchni A [m 2 ]z c = 0, P i = A i , – ciężar jednostkowy [N/m 2 ]Pi xi Ai xixc xc ,PAiA i x i – moment statyczny [cm 3 ] względem osi X (A i y i – względem osi Y).PRZYKŁAD: Określanie środka powierzchni figurypłaskiej: A 1 = 11 = 1 cm 2 , A 2 = 25 = 10 cm 2 ,A 3 = 22 = 4 cm 2 2, A A 15 cm3i.Współrzędne środka ciężkości figury wynoszą:A1x1 A2x2 A3xxcA A A1211,5 10 3 4 5 3,43 cm,110 4A1y1 A2y2 A3yycA A A1211,5 10 3,5 4 5 3,77 cm.110 43333ii02 Statyka.doc 37