Montáž Obsah - Katedra výrobných systémov
Montáž Obsah - Katedra výrobných systémov
Montáž Obsah - Katedra výrobných systémov
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
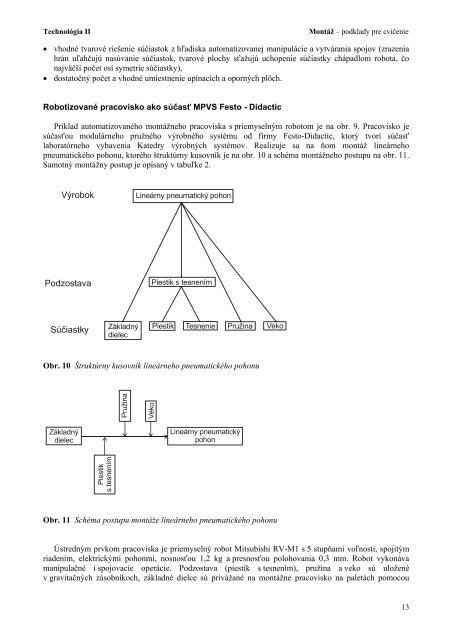
Technológia IIMontáž – podklady pre cvičenie• vhodné tvarové riešenie súčiastok z hľadiska automatizovanej manipulácie a vytvárania spojov (zrazeniahrán uľahčujú nasúvanie súčiastok, tvarové plochy sťažujú uchopenie súčiastky chápadlom robota, čonajväčší počet osí symetrie súčiastky),• dostatočný počet a vhodné umiestnenie upínacích a oporných plôch.Robotizované pracovisko ako súčasť MPVS Festo - DidacticPríklad automatizovaného montážneho pracoviska s priemyselným robotom je na obr. 9. Pracovisko jesúčasťou modulárneho pružného výrobného systému od firmy Festo-Didactic, ktorý tvorí súčasťlaboratórneho vybavenia Katedry výrobných systémov. Realizuje sa na ňom montáž lineárnehopneumatického pohonu, ktorého štruktúrny kusovník je na obr. 10 a schéma montážneho postupu na obr. 11.Samotný montážny postup je opísaný v tabuľke 2.VýrobokLineárny pneumatický pohonPodzostavaPiestik s tesnenímSúčiastkyZákladnýdielecPiestikTesneniePružinaVekoObr. 10 Štruktúrny kusovník lineárneho pneumatického pohonuPružinaVekoZákladnýdielecLineárny pneumatickýpohonPiestiks tesnen í mObr. 11 Schéma postupu montáže lineárneho pneumatického pohonuÚstredným prvkom pracoviska je priemyselný robot Mitsubishi RV-M1 s 5 stupňami voľnosti, spojitýmriadením, elektrickými pohonmi, nosnosťou 1,2 kg a presnosťou polohovania 0,3 mm. Robot vykonávamanipulačné i spojovacie operácie. Podzostava (piestik s tesnením), pružina a veko sú uloženév gravitačných zásobníkoch, základné dielce sú privážané na montážne pracovisko na paletách pomocou13