
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
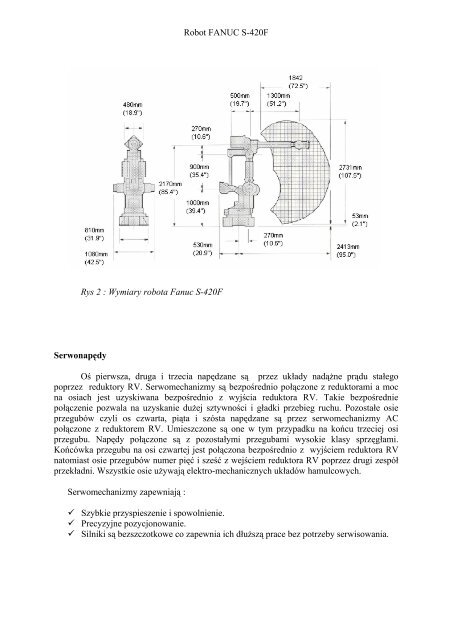
Robot FANUC S-420FRys 2 : Wymiary robota Fanuc S-420FSerwonapędyOś pierwsza, druga i trzecia napędzane są przez układy nadążne prądu stałegopoprzez reduktory RV. Serwomechanizmy są bezpośrednio połączone z reduktorami a mocna osiach jest uzyskiwana bezpośrednio z wyjścia reduktora RV. Takie bezpośredniepołączenie pozwala na uzyskanie dużej sztywności i gładki przebieg ruchu. Pozostałe osieprzegubów czyli os czwarta, piąta i szósta napędzane są przez serwomechanizmy ACpołączone z reduktorem RV. Umieszczone są one w tym przypadku na końcu trzeciej osiprzegubu. Napędy połączone są z pozostałymi przegubami wysokie klasy sprzęgłami.Końcówka przegubu na osi czwartej jest połączona bezpośrednio z wyjściem reduktora RVnatomiast osie przegubów numer pięć i sześć z wejściem reduktora RV poprzez drugi zespółprzekładni. Wszystkie osie używają elektro-mechanicznych układów hamulcowych.Serwomechanizmy zapewniają : Szybkie przyspieszenie i spowolnienie. Precyzyjne pozycjonowanie. Silniki są bezszczotkowe co zapewnia ich dłuższą prace bez potrzeby serwisowania.