Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
Introducción<br />
TEORÍA DE CONTROL<br />
Un controlador tiene como tarea la <strong>de</strong> mantener la variable controlada en correspon<strong>de</strong>ncia muy próxima con la señal <strong>de</strong><br />
referencia, eliminando la influencia <strong>de</strong> las perturbaciones que tien<strong>de</strong>n a cambiar el valor <strong>de</strong> la variable controlada.<br />
La acción <strong>de</strong> control <strong>de</strong> un controlador se <strong>de</strong>fine como la relación entre el error en la señal <strong>de</strong> salida () y la señal<br />
actuante (). En otras palabras es la función <strong>de</strong> transferencia <strong>de</strong>l controlador:<br />
M<br />
<br />
s<br />
m<br />
F s ó en el dominio <strong>de</strong>l tiempo <br />
t f t <br />
E s<br />
e t<br />
<br />
s<br />
K<br />
U s E s<br />
M s Y s<br />
Gs<br />
Tipos <strong>de</strong> acción <strong>de</strong> control<br />
F V<br />
Existen múltiples formas <strong>de</strong> acción <strong>de</strong> control, cuyo tipo <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la forma <strong>de</strong> obtención <strong>de</strong> la ley <strong>de</strong> control. Sin<br />
embargo existen unos tipos básicos <strong>de</strong> acción <strong>de</strong> control que se usan comúnmente en procesos industriales y que son:<br />
1. Acción <strong>de</strong> control discontinua o <strong>de</strong> dos posiciones (ON-OFF).<br />
2. Acción <strong>de</strong> control proporcional.<br />
3. Acción <strong>de</strong> control <strong>de</strong>rivativa.<br />
4. Acción <strong>de</strong> control integral.<br />
En la práctica los controles integral y <strong>de</strong>rivativo no se pue<strong>de</strong>n usar solos, por lo tanto estos se suelen usar en<br />
combinación con otras, y se obtienen las siguientes acciones <strong>de</strong> control posibles:<br />
5. Acción <strong>de</strong> control proporcional más <strong>de</strong>rivativa.<br />
6. Acción <strong>de</strong> control proporcional más integral.<br />
7. Acción <strong>de</strong> control proporcional más integral más <strong>de</strong>rivativa.<br />
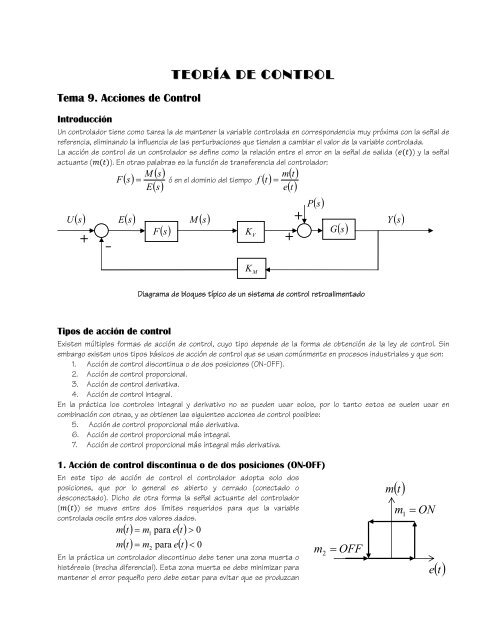
1. Acción <strong>de</strong> control discontinua o <strong>de</strong> dos posiciones (ON-OFF)<br />
En este tipo <strong>de</strong> acción <strong>de</strong> control el controlador adopta solo dos<br />
posiciones, que por lo general es abierto y cerrado (conectado o<br />
<strong>de</strong>sconectado). Dicho <strong>de</strong> otra forma la señal actuante <strong>de</strong>l controlador<br />
() se mueve entre dos límites requeridos para que la variable<br />
controlada oscile entre dos valores dados.<br />
m t m para e t 0<br />
1 <br />
t m para e<br />
t 0<br />
K M<br />
m 2<br />
En la práctica un controlador discontinuo <strong>de</strong>be tener una zona muerta o<br />
histéresis (brecha diferencial). Esta zona muerta se <strong>de</strong>be minimizar para<br />
mantener el error pequeño pero <strong>de</strong>be estar para evitar que se produzcan<br />
<br />
P s Diagrama <strong>de</strong> bloques típico <strong>de</strong> un sistema <strong>de</strong> control retroalimentado<br />
m <br />
2<br />
OFF<br />
m t<br />
m <br />
1<br />
ON<br />
e t
2 Teoría <strong>de</strong> <strong>Control</strong><br />
oscilaciones.<br />
Por ejemplo un control <strong>de</strong> nivel eléctrico:<br />
La presencia <strong>de</strong> la brecha diferencial produce un error entre el valor <strong>de</strong>seado (nivel <strong>de</strong>seado en el ejemplo) y el valor real<br />
<strong>de</strong> la variable (nivel real en el ejemplo). Pero esta es necesaria para evitar conexiones y <strong>de</strong>sconexiones muy cercanas en<br />
tiempo.<br />
t<br />
Es por esto que a brecha diferencial se <strong>de</strong>be ajustar <strong>de</strong>pendiendo <strong>de</strong> la exactitud <strong>de</strong>seada, <strong>de</strong> la frecuencia <strong>de</strong> conexión<br />
y <strong>de</strong>sconexión <strong>de</strong>l elemento final <strong>de</strong> control (válvula solenoi<strong>de</strong>) y <strong>de</strong> los valores a obtener.<br />
2. Acción <strong>de</strong> control proporcional (P)<br />
Un control proporcional tiene una salida que es proporcional al error:<br />
M s<br />
m t KPe<br />
t ó F s <br />
E<br />
s<br />
Don<strong>de</strong> KP es la ganancia <strong>de</strong>l controlador proporcional.<br />
Este es esencialmente un amplificador <strong>de</strong> ganancia y se usa cuando se<br />
quiere un control lineal en una región <strong>de</strong>l error.<br />
Para errores negativos gran<strong>de</strong>s la salida <strong>de</strong>l controlador es cero (0%) o un<br />
valor mínimo y para errores positivos la salida será el valor máximo (100%),<br />
y en la mayoría <strong>de</strong> los controladores estos valores máximos y mínimos son<br />
ajustables.<br />
Jean-François DULHOSTE<br />
Válvula<br />
h<br />
Solenoi<strong>de</strong><br />
Entra<br />
agua<br />
<br />
h<br />
K p<br />
Flotador<br />
Sale agua<br />
Brecha diferencial<br />
En cierta forma es similar al controlador ON-OFF solo que en vez <strong>de</strong> una zona muerta posee una región <strong>de</strong> respuesta<br />
lineal.<br />
Banda Proporcional<br />
La acción <strong>de</strong> control proporcional se pue<strong>de</strong> expresar mediante el concepto <strong>de</strong> banda proporcional, la cual se <strong>de</strong>fine como<br />
el inverso <strong>de</strong> expresado en porcentaje:<br />
115 V<br />
100%<br />
m t<br />
0% e t
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
100<br />
BP<br />
<br />
K P<br />
Esta se pue<strong>de</strong> enten<strong>de</strong>r como el cambio necesario en el error (expresado en porcentaje <strong>de</strong>l valor máximo <strong>de</strong> la variable<br />
controlada) para que se produzca un cambio <strong>de</strong>l 100% en la salida <strong>de</strong>l controlador. Para que la salida <strong>de</strong>l controlador<br />
pase <strong>de</strong> su valor mínimo (totalmente cerrado) a su valor máximo (totalmente abierto).<br />
La banda proporcional <strong>de</strong>seada es <strong>de</strong> 100%, si esta es menor (ganancia gran<strong>de</strong>) entonces el instrumento se hace muy<br />
sensible lo que produce que el sistema entre en ciclage (similar a un sistema ON-OFF con una zona muerta pequeña). Si<br />
la banda proporcional es muy gran<strong>de</strong> entonces el sistema es muy lento.<br />
Características <strong>de</strong> la acción proporcional<br />
La conexión física directa entre el error y la acción <strong>de</strong> control produce una respuesta rápida y estable.<br />
Los sistemas con acción <strong>de</strong> control proporcional al introducirles una perturbación sostenida (rampa) nunca<br />
llevan la variable controlada al valor <strong>de</strong>seado, se produce un error en estado estable (OFF-SET)<br />
Por ejemplo un control <strong>de</strong> nivel mecánico:<br />
<br />
Válvula<br />
3. Acción <strong>de</strong> control <strong>de</strong>rivativa (D)<br />
Pivote<br />
Entra<br />
agua<br />
La salida <strong>de</strong> un controlador con acción <strong>de</strong> control <strong>de</strong>rivativa es proporcional a la rata <strong>de</strong> cambio <strong>de</strong>l error:<br />
<strong>de</strong><br />
<br />
t M<br />
m t K D ó <br />
s F s K Ds<br />
dt E<br />
s<br />
Don<strong>de</strong> KD es la constante <strong>de</strong> acción integral.<br />
En otras palabras la salida <strong>de</strong>l controlador varía en proporción a la velocidad <strong>de</strong> cambio <strong>de</strong>l error, si el error es<br />
constante no se produce ninguna acción <strong>de</strong> control.<br />
Características <strong>de</strong> la acción <strong>de</strong> control <strong>de</strong>rivativa<br />
<br />
Flotador<br />
Sale agua<br />
No tiene noción alguna <strong>de</strong>l error <strong>de</strong> la variable en estado estable. Si el error no cambia no hay acción <strong>de</strong> control.<br />
Por lo tanto no se pue<strong>de</strong> usar sola.<br />
Se produce un a<strong>de</strong>lanto <strong>de</strong> la acción <strong>de</strong> control, si la variable controlada cambia rápidamente la acción<br />
correctora es rápida y <strong>de</strong> gran amplitud, por lo que el sistema <strong>de</strong> control actúa rápidamente antes <strong>de</strong> que el<br />
error sea gran<strong>de</strong>. Por supuesto la acción <strong>de</strong> control no pue<strong>de</strong> anticipar a un error que aún no se ha producido.<br />
Amplifica las señales <strong>de</strong> ruido.<br />
Produce un efecto <strong>de</strong> saturación en el actuador.<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
3
4 Teoría <strong>de</strong> <strong>Control</strong><br />
Por ejemplo un control <strong>de</strong> nivel mecánico con amortiguador<br />
4. Acción <strong>de</strong> control integral (I)<br />
El controlador integral tiene una salida que es proporcional a la integral <strong>de</strong>l error:<br />
t<br />
M<br />
m<br />
t K I e<br />
t dt ó <br />
s K I<br />
F s <br />
0<br />
E<br />
s s<br />
Don<strong>de</strong> es la constante <strong>de</strong> acción integral.<br />
En otras palabras la velocidad <strong>de</strong> la salida <strong>de</strong>l controlador es proporcional al error o la rata <strong>de</strong> cambio <strong>de</strong> la salida <strong>de</strong>l<br />
controlador es proporcional al error. Por lo cual la ten<strong>de</strong>ncia es a minimizar el error.<br />
Características <strong>de</strong> la acción integral<br />
Es relativamente lenta <strong>de</strong>bido a la conexión elástica entre los elementos <strong>de</strong> control. Por lo cual no se usa solo.<br />
No permite error en estado estable.<br />
Tien<strong>de</strong> a sobre corregir el error, por lo cual es posible que vuelva oscilatorio al sistema. De hecho aumenta el<br />
or<strong>de</strong>n <strong>de</strong>l mismo.<br />
Jean-François DULHOSTE<br />
Válvula<br />
<br />
Pivote<br />
Entra<br />
agua<br />
<br />
Flotador<br />
Sale agua
Por ejemplo un control <strong>de</strong> nivel hidráulico<br />
5. <strong>Control</strong> proporcional más <strong>de</strong>rivativa (PD)<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
La salida <strong>de</strong>l controlador es proporcional al error y a su <strong>de</strong>rivada:<br />
<strong>de</strong><br />
<br />
t M<br />
m t K Pe<br />
t K D ó <br />
s F s K P K Ds<br />
dt E<br />
s<br />
Este combina las ventajas <strong>de</strong>l control proporcional más el <strong>de</strong>rivativo, pero se usa poco por no ser capaz <strong>de</strong> eliminar el<br />
error en estado estable.<br />
Tiempo <strong>de</strong> acción <strong>de</strong>rivativa<br />
La ecuación <strong>de</strong> este control se pue<strong>de</strong> escribir también como:<br />
<strong>de</strong><br />
<br />
t <br />
m t K P e<br />
t TD<br />
<br />
dt<br />
K D<br />
Don<strong>de</strong> T es el tiempo <strong>de</strong> acción <strong>de</strong>rivativa.<br />
D<br />
K P<br />
Pivote<br />
Válvula<br />
<br />
Entra<br />
agua<br />
Aceite a<br />
presión<br />
Esta se <strong>de</strong>fine como el cambio lineal en el error, cuando la respuesta proporcional iguale a la <strong>de</strong>rivativa.<br />
Se acostumbra expresar la acción <strong>de</strong>rivativa en minutos <strong>de</strong> a<strong>de</strong>lanto, que representa el tiempo en minutos con que la<br />
acción <strong>de</strong>rivativa se anticipa al efecto <strong>de</strong> acción proporcional.<br />
La principal ventaja <strong>de</strong> este control es que produce señales <strong>de</strong> a<strong>de</strong>lanto que actúan rápidamente cuando la variable<br />
controlada cambia bruscamente.<br />
6. <strong>Control</strong> proporcional más integral (PI)<br />
En un controlador proporcional integral la salida es proporcional al error y a la integral <strong>de</strong>l error:<br />
t<br />
M<br />
m<br />
t K Pe<br />
t K I e<br />
t dt ó <br />
s K I<br />
F s K<br />
0<br />
P<br />
E s<br />
<br />
<br />
Flotador<br />
s<br />
Sale agua<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
5
6 Teoría <strong>de</strong> <strong>Control</strong><br />
Este es un esfuerzo para combinar las ventajas <strong>de</strong>l controlador proporcional más el controlador integral, es <strong>de</strong>cir tiene<br />
una buena respuesta transitoria por el efecto proporcional y corrige el error en estado establo por el efecto integral.<br />
Tiempo <strong>de</strong> acción integral<br />
m<br />
Jean-François DULHOSTE<br />
<br />
<br />
<br />
<br />
t<br />
t K e t e t dt<br />
P<br />
1<br />
T<br />
K P<br />
Don<strong>de</strong> TI es el tiempo <strong>de</strong> acción integral.<br />
K<br />
I<br />
I<br />
0<br />
<br />
<br />
Esta se <strong>de</strong>fine como el tiempo necesario para que la respuesta integral iguale a la proporcional <strong>de</strong>spués <strong>de</strong> un cambio<br />
en escalón <strong>de</strong>l error.<br />
7. <strong>Control</strong> proporcional más integral más <strong>de</strong>rivativo (PID)<br />
La salida <strong>de</strong>l controlador es proporcional al error, a su <strong>de</strong>rivada y a su integral:<br />
t <strong>de</strong><br />
<br />
t M<br />
m t K Pe<br />
t K I e t dt K D ó <br />
s K I<br />
F s K P K Ds<br />
0<br />
dt E<br />
s s<br />
O expresado en función <strong>de</strong>l tiempo <strong>de</strong> acción integral y <strong>de</strong>rivativa:<br />
100 1 t <strong>de</strong><br />
<br />
t <br />
m t <br />
e<br />
t e t dt T<br />
<br />
<br />
D<br />
BP T 0<br />
I<br />
dt <br />
Este controlador ofrece rápida respuesta proporcional al error, mientras que tiene un reajuste automático <strong>de</strong>s<strong>de</strong> la<br />
parte integral que elimina el error en estado estable. La acción <strong>de</strong>rivativa permite que el controlador responda<br />
rápidamente a cambios en el error.<br />
Generalmente en los controladores PID se pue<strong>de</strong> ajustar:<br />
en % <strong>de</strong> la banda proporcional<br />
en minutos <strong>de</strong> acción integral<br />
en minutos <strong>de</strong> acción <strong>de</strong>rivativa<br />
Resumen<br />
<strong>Control</strong> Función <strong>de</strong> Velocidad <strong>de</strong> Error en estado Uso solo Costo<br />
transferencia respuesta estable<br />
Proporcional (P) K P<br />
Media Existe Si Bajo<br />
Derivativo (D) KD s<br />
Alta Existe No Medio<br />
Integral (I)<br />
K I<br />
s<br />
Baja No hay No Medio<br />
PI<br />
K I K P<br />
s<br />
<br />
Media No hay Si Alto<br />
PD KP KDs<br />
Alta Existe Poco Alto<br />
PID<br />
K I K P K Ds<br />
s<br />
Alta No hay Si Alto
Ejemplo <strong>de</strong> estudio <strong>de</strong>l efecto <strong>de</strong> una acción <strong>de</strong> control en un sistema<br />
Se tiene un proceso que respon<strong>de</strong> a una ecuación <strong>de</strong> primer or<strong>de</strong>n:<br />
Dy y u<br />
Don<strong>de</strong> la función <strong>de</strong> transferencia es:<br />
1<br />
1<br />
G<br />
s o en el dominio <strong>de</strong>l tiempo g<br />
t <br />
s<br />
1<br />
D<br />
1<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
s<br />
K<br />
U s E s<br />
M<br />
s 1<br />
Y s<br />
Si se supone la referencia es constante, el elemento que pue<strong>de</strong> afectar al sistema es la perturbación. Por tanto<br />
por comodidad po<strong>de</strong>mos tomar 0, esto implica que la respuesta <strong>de</strong>l sistema <strong>de</strong>be ten<strong>de</strong>r a cero para<br />
cualquier perturbación en el transcurso <strong>de</strong>l tiempo.<br />
En estas condiciones puedo transformar el diagrama <strong>de</strong> bloque <strong>de</strong>l sistema completo en:<br />
Reduciendo el diagrama <strong>de</strong> bloques obtenemos:<br />
Si el controlador es proporcional<br />
P K s<br />
F <br />
La función <strong>de</strong> transferencia <strong>de</strong>l sistema completo será:<br />
Y s 1<br />
<br />
P<br />
s s<br />
1<br />
K M KV<br />
K P<br />
Don<strong>de</strong> para simplificar se pue<strong>de</strong> escribir KM KV<br />
K P 1 K<br />
Luego la función <strong>de</strong> transferencia será:<br />
Y s 1<br />
<br />
P s s<br />
<br />
K<br />
F V<br />
P s<br />
Y s s<br />
K M<br />
1<br />
s<br />
1<br />
KM KV<br />
F<br />
s P Y s 1<br />
s<br />
1<br />
KM<br />
KV<br />
F<br />
s<br />
P s s<br />
1<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
7
8 Teoría <strong>de</strong> <strong>Control</strong><br />
Estudio <strong>de</strong> estabilidad <strong>de</strong>l sistema<br />
Vemos que el sistema es <strong>de</strong> primer or<strong>de</strong>n y su ecuación característica es:<br />
s K 0<br />
Este sistema tiene una sola raíz negativa:<br />
K<br />
s <br />
<br />
Por lo tanto el sistema es estable al igual que el proceso.<br />
Estudio <strong>de</strong>l valor en estado estable<br />
Para este estudio utilizaremos un concepto <strong>de</strong> las transformadas <strong>de</strong> Laplace <strong>de</strong>nominado teorema <strong>de</strong>l valor final que<br />
dice:<br />
VF lim f t lim sFs<br />
t s0<br />
El valor en estado estable es por <strong>de</strong>finición el valor que se obtendría cuando la parte transitoria <strong>de</strong> la respuesta se<br />
hace <strong>de</strong>spreciable, es <strong>de</strong>cir el valor <strong>de</strong> la respuesta para un tiempo suficientemente gran<strong>de</strong> cercano al infinito. Por esto<br />
el valor en estado estable se pue<strong>de</strong> obtener con el teorema <strong>de</strong>l valor final:<br />
Y<br />
<br />
s sP<br />
<br />
s YEE<br />
lim sY s lim s P s lim<br />
s0<br />
s0<br />
P<br />
s<br />
s0<br />
s<br />
K<br />
Si suponemos que la perturbación cambia bruscamente y luego se mantiene constante en el tiempo, lo cual está<br />
representado por un escalón:<br />
H<br />
p t H P<br />
s <br />
s<br />
El valor en estado estable será:<br />
sH H<br />
YEE<br />
lim <br />
s0<br />
sKsK Según lo supuesto al principio el valor <strong>de</strong>seado para la salida en estado estable <strong>de</strong>bería ser cero, puesto que nuestra<br />
señal <strong>de</strong> referencia es cero, luego este valor en estado estable indica que con este tipo <strong>de</strong> controlador se produce un<br />
error en estado estable que es igual a /.<br />
Estudio <strong>de</strong> la respuesta <strong>de</strong>l sistema<br />
Para analizar la respuesta <strong>de</strong>l sistema en este caso po<strong>de</strong>mos escribir entonces la ecuación <strong>de</strong>l mismo que será:<br />
H<br />
Dy Ky H dividiendo por K obtenemos Dy y <br />
K K<br />
Por lo tanto el sistema es un sistema <strong>de</strong> primer or<strong>de</strong>n y respon<strong>de</strong> como tal. Suponiendo que en las condiciones iniciales<br />
la salida toma el valor <strong>de</strong> la señal <strong>de</strong> referencia:<br />
Jean-François DULHOSTE<br />
t 0 Y0<br />
0<br />
La respuesta <strong>de</strong>l sistema será <strong>de</strong> la forma:<br />
H KtH y e <br />
K K<br />
La gráfica <strong>de</strong> la respuesta <strong>de</strong> este sistema será:
H<br />
Si el controlador es proporcional mas <strong>de</strong>rivativo<br />
s K K s<br />
F P D<br />
La función <strong>de</strong> transferencia <strong>de</strong>l sistema completo será:<br />
Y s<br />
1<br />
<br />
P s s<br />
1<br />
KM<br />
KV<br />
K P K Ds<br />
<br />
1<br />
KM<br />
KV<br />
K D s 1<br />
K<br />
Don<strong>de</strong> para simplificar se pue<strong>de</strong> escribir KM KV<br />
K P 1 K y KM KV<br />
KD<br />
Luego la función <strong>de</strong> transferencia será:<br />
Y s<br />
P<br />
s K s K<br />
K<br />
<br />
1<br />
<br />
<br />
M KV<br />
K P<br />
Estudio <strong>de</strong> estabilidad <strong>de</strong>l sistema<br />
Vemos que el sistema es <strong>de</strong> primer or<strong>de</strong>n y su ecuación característica es:<br />
<br />
s<br />
K<br />
K 0<br />
Este sistema tiene una sola raíz negativa:<br />
K<br />
s <br />
<br />
K<br />
Por lo tanto el sistema es estable al igual que el proceso.<br />
0<br />
pt<br />
<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
Estudio <strong>de</strong>l valor en estado estable<br />
El valor en estado estable se pue<strong>de</strong> obtener con el teorema <strong>de</strong>l valor final:<br />
Y s<br />
sP<br />
<br />
s YEE<br />
lim s P s lim<br />
s0<br />
P<br />
s<br />
s0<br />
K s K<br />
Si suponemos que la perturbación cambia bruscamente y luego se mantiene constante en el tiempo, lo cual está<br />
representado por un escalón:<br />
H<br />
p t H P<br />
s <br />
s<br />
t H y<br />
Error<br />
K<br />
t ut<br />
Kyt e M<br />
t K et<br />
m P<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
<br />
9
10 Teoría <strong>de</strong> <strong>Control</strong><br />
El valor en estado estable será:<br />
Y<br />
Jean-François DULHOSTE<br />
EE lim<br />
s0<br />
K<br />
sH<br />
<br />
H<br />
s K sK Según lo supuesto al principio el valor <strong>de</strong>seado para la salida en estado estable <strong>de</strong>bería ser cero, puesto que nuestra<br />
señal <strong>de</strong> referencia es cero, luego este valor en estado estable indica que con este tipo <strong>de</strong> controlador se produce un<br />
error en estado estable que es igual a /.<br />
Estudio <strong>de</strong> la respuesta <strong>de</strong>l sistema<br />
Para analizar la respuesta <strong>de</strong>l sistema en este caso po<strong>de</strong>mos escribir entonces la ecuación <strong>de</strong>l mismo que será:<br />
K H<br />
K Dy Ky H dividiendo por K obtenemos Dy y <br />
K K<br />
Por lo tanto el sistema es un sistema <strong>de</strong> primer or<strong>de</strong>n y respon<strong>de</strong> como tal. Suponiendo que en las condiciones iniciales<br />
la salida toma el valor <strong>de</strong> la señal <strong>de</strong> referencia:<br />
0 0 0 Y<br />
t<br />
La respuesta <strong>de</strong>l sistema será <strong>de</strong> la forma:<br />
H K H<br />
K t<br />
y e <br />
K K<br />
La gráfica <strong>de</strong> la respuesta <strong>de</strong> este sistema será casi idéntica al control proporcional, solo cambiara la duración <strong>de</strong> la<br />
etapa transitoria, que será más larga, en función <strong>de</strong>l nuevo valor <strong>de</strong> la constante <strong>de</strong> tiempo, que en este caso <strong>de</strong>pen<strong>de</strong><br />
<strong>de</strong>l tiempo <strong>de</strong> acción <strong>de</strong>rivativa.<br />
H<br />
0<br />
pt<br />
<br />
La diferencia entre una acción <strong>de</strong> control proporcional y una proporcional <strong>de</strong>rivativa, se pue<strong>de</strong> apreciar más claramente<br />
si suponemos que el error varía en forma <strong>de</strong> rampa (esta suposición es meramente ilustrativa ya que en un caso real es<br />
muy difícil obtener un error variando <strong>de</strong> esta forma, en todo caso no correspon<strong>de</strong> a una perturbación variando en forma<br />
<strong>de</strong> rampa). Po<strong>de</strong>mos observar si graficamos el error y la salida <strong>de</strong>l controlador lo siguiente:<br />
t H y<br />
Error<br />
K<br />
t ut<br />
Kyt e M<br />
t K etKDet<br />
m P<br />
D
K D<br />
<strong>de</strong><br />
t<br />
dt<br />
0<br />
Si el controlador es proporcional más integral<br />
K I<br />
F<br />
s K P<br />
s<br />
<br />
La función <strong>de</strong> transferencia <strong>de</strong>l sistema completo será:<br />
Y s<br />
1<br />
1<br />
<br />
<br />
P<br />
s<br />
K<br />
K K K<br />
I <br />
M V I<br />
s<br />
1<br />
K K K s KM<br />
KV<br />
K<br />
M V P 1<br />
P <br />
s <br />
s<br />
Y s<br />
s<br />
2<br />
P<br />
s s<br />
1KMKVKPsKMKVKI En este caso el sistema se vuelve <strong>de</strong> segundo or<strong>de</strong>n, la función <strong>de</strong> transferencia será <strong>de</strong> la forma:<br />
<br />
2 2<br />
2 n n s s<br />
Y s s<br />
<br />
P s <br />
Don<strong>de</strong>:<br />
K M KV<br />
K P <br />
n<br />
<br />
<br />
1<br />
2 K M KV<br />
K I<br />
2 ; n<br />
<br />
<br />
Estudio <strong>de</strong> estabilidad <strong>de</strong>l sistema<br />
Como el sistema es <strong>de</strong> segundo or<strong>de</strong>n su ecuación característica es <strong>de</strong> la forma:<br />
2<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
2<br />
s 2<br />
ns n<br />
0<br />
Este sistema tiene dos raíces, y la estabilidad y forma <strong>de</strong> la respuesta <strong>de</strong>pen<strong>de</strong>n <strong>de</strong>l valor <strong>de</strong> .<br />
Se observa entonces aquí que la principal diferencia que aparece con respecto a la acción <strong>de</strong> control proporcional y<br />
<strong>de</strong>rivativo es que el sistema completo es <strong>de</strong> un or<strong>de</strong>n superior al proceso, luego es posible que este se vuelva oscilatorio.<br />
Estudio <strong>de</strong>l valor en estado estable<br />
t K e<br />
t K Det<br />
m P<br />
D<br />
t K et<br />
m P<br />
t utKyt<br />
e M<br />
El valor en estado estable se pue<strong>de</strong> obtener con el teorema <strong>de</strong>l valor final:<br />
Y s<br />
s<br />
YEE<br />
lim s P<br />
s lim s<br />
P<br />
s<br />
s0<br />
P<br />
s<br />
s0<br />
2<br />
2<br />
s 2ns<br />
n<br />
Si suponemos que la perturbación cambia bruscamente y luego se mantiene constante en el tiempo, lo cual está<br />
representado por un escalón:<br />
<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
11
12 Teoría <strong>de</strong> <strong>Control</strong><br />
p t H <br />
H<br />
P<br />
s <br />
s<br />
El valor en estado estable será:<br />
2<br />
s<br />
YEE<br />
lim<br />
s0<br />
2<br />
2<br />
s 2ns<br />
n<br />
H<br />
0<br />
s<br />
Según lo supuesto al principio el valor <strong>de</strong>seado para la salida en estado estable <strong>de</strong>be ser cero, puesto que nuestra señal<br />
<strong>de</strong> referencia es cero, luego este valor en estado estable indica que con este tipo <strong>de</strong> controlador no existe error en<br />
estado estable.<br />
Estudio <strong>de</strong> la respuesta <strong>de</strong>l sistema<br />
Para analizar la respuesta <strong>de</strong>l sistema en este caso po<strong>de</strong>mos escribir entonces la ecuación <strong>de</strong>l mismo que será:<br />
Jean-François DULHOSTE<br />
2<br />
2<br />
D n n<br />
y 2 Dy y Dp<br />
2<br />
2 K<br />
D y 2<br />
Dy y <br />
K<br />
M V<br />
n n<br />
2<br />
n<br />
2<br />
2<br />
K<br />
I<br />
Dp<br />
2<br />
D y 2nDy<br />
n<br />
y n<br />
K M KV<br />
K I<br />
Don<strong>de</strong>: p'<br />
Dp<br />
4<br />
n<br />
p'<br />
Por lo tanto el sistema es un sistema <strong>de</strong> segundo or<strong>de</strong>n y respon<strong>de</strong> como tal. Suponiendo que en las condiciones<br />
iniciales la salida toma el valor <strong>de</strong> la señal <strong>de</strong> referencia:<br />
t 0 Y0<br />
0<br />
La respuesta <strong>de</strong>l sistema podrá tomar cualquiera <strong>de</strong> las cuatro formas posibles en sistemas <strong>de</strong> segundo or<strong>de</strong>n<br />
La gráfica <strong>de</strong> la respuesta <strong>de</strong> este sistema será, para el caso <strong>de</strong> una perturbación () en escalón:<br />
Si<br />
1<br />
H<br />
0<br />
p'<br />
t<br />
pt<br />
<br />
y t m<br />
t ut<br />
Kyt e M<br />
t<br />
t K e<br />
t K e<br />
t<br />
P<br />
I<br />
<br />
0<br />
<br />
dt
Si<br />
0 <br />
1<br />
H<br />
Si el controlador es proporcional más integral más <strong>de</strong>rivativo<br />
K I<br />
F s K P K Ds<br />
s<br />
La función <strong>de</strong> transferencia <strong>de</strong>l sistema completo será:<br />
Y s<br />
1<br />
1<br />
<br />
<br />
P s<br />
K<br />
K K<br />
I <br />
M<br />
s<br />
1<br />
K K K K s s KM<br />
KV<br />
K<br />
M V P D 1<br />
P <br />
s <br />
s<br />
Y s<br />
s<br />
<br />
2<br />
P<br />
s KMKVKDs1KMKVKPsKMKVKI En este caso el sistema se vuelve <strong>de</strong> segundo or<strong>de</strong>n, la función <strong>de</strong> transferencia será <strong>de</strong> la forma:<br />
Y s KMKVKDs 2<br />
2<br />
P<br />
s s 2ns <br />
n<br />
Don<strong>de</strong>:<br />
1KMKVKP KM<br />
KV<br />
K I<br />
2 n<br />
; n <br />
K K K K K K<br />
2<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
V K I K K K s<br />
<br />
Estudio <strong>de</strong> estabilidad <strong>de</strong>l sistema<br />
M<br />
0<br />
V<br />
p'<br />
t<br />
D<br />
<br />
Como el sistema es <strong>de</strong> segundo or<strong>de</strong>n su ecuación característica es <strong>de</strong> la forma:<br />
2<br />
y t m<br />
M<br />
pt<br />
<br />
t<br />
t K e<br />
t K e<br />
t<br />
V<br />
2<br />
s 2<br />
ns n<br />
0<br />
Este sistema tiene dos raíces, y la estabilidad y forma <strong>de</strong> la respuesta <strong>de</strong>pen<strong>de</strong>n <strong>de</strong>l valor <strong>de</strong> .<br />
Se observa entonces aquí que la principal diferencia que aparece con respecto a la acción <strong>de</strong> control proporcional más<br />
integral es que el radio <strong>de</strong> amortiguamiento y la frecuencia natural son diferentes, por lo cual la parte transitoria será<br />
probablemente más corta y la respuesta estará más cerca <strong>de</strong>l valor <strong>de</strong>seado.<br />
D<br />
t ut<br />
K yt<br />
<br />
e M<br />
P<br />
I<br />
<br />
0<br />
dt<br />
<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
M<br />
V<br />
D<br />
13
14 Teoría <strong>de</strong> <strong>Control</strong><br />
Sin embargo al afectar el valor <strong>de</strong>l radio <strong>de</strong> amortiguamiento esta acción podría hacer ten<strong>de</strong>r al sistema hacia la<br />
inestabilidad si este valor se acerca mucho a cero, por lo cual se <strong>de</strong>be tener cuidado con la calibración <strong>de</strong>l tiempo <strong>de</strong><br />
acción integral.<br />
Estudio <strong>de</strong>l valor en estado estable<br />
El valor en estado estable se pue<strong>de</strong> obtener con el teorema <strong>de</strong>l valor final:<br />
Y s<br />
<br />
K M KV<br />
K D s<br />
YEE<br />
lim s P s lim s<br />
P<br />
s<br />
s0<br />
P<br />
s<br />
s0<br />
2<br />
2<br />
s 2ns<br />
<br />
n<br />
Si suponemos que la perturbación cambia bruscamente y luego se mantiene constante en el tiempo, lo cual está<br />
representado por un escalón:<br />
H<br />
p t H P<br />
s <br />
s<br />
El valor en estado estable será:<br />
KMKVKDsH YEE<br />
lim s<br />
0<br />
s0<br />
2<br />
2<br />
s 2<br />
s s<br />
n n<br />
Según lo supuesto al principio el valor <strong>de</strong>seado para la salida en estado estable <strong>de</strong>be ser cero, puesto que nuestra señal<br />
<strong>de</strong> referencia es cero, luego este valor en estado estable indica que con este tipo <strong>de</strong> controlador no existe error en<br />
estado estable.<br />
Estudio <strong>de</strong> la respuesta <strong>de</strong>l sistema<br />
Para analizar la respuesta <strong>de</strong>l sistema en este caso po<strong>de</strong>mos escribir entonces la ecuación <strong>de</strong>l mismo que será:<br />
2<br />
2<br />
D y 2 nDy<br />
n<br />
y K M KV<br />
K D Dp<br />
2<br />
2 K M KV<br />
K I<br />
D y 2nDy<br />
n<br />
y Dp<br />
2<br />
<br />
Jean-François DULHOSTE<br />
2<br />
2<br />
n<br />
2<br />
D y 2nDy<br />
n<br />
y n<br />
K M KV<br />
K I<br />
Don<strong>de</strong>: p'<br />
Dp<br />
4<br />
n<br />
p'<br />
Por lo tanto el sistema es un sistema <strong>de</strong> segundo or<strong>de</strong>n y respon<strong>de</strong> como tal. Suponiendo que en las condiciones<br />
iniciales la salida toma el valor <strong>de</strong> la señal <strong>de</strong> referencia:<br />
t 0 Y0<br />
0<br />
La respuesta <strong>de</strong>l sistema podrá tomar cualquiera <strong>de</strong> las cuatro formas posibles en sistemas <strong>de</strong> segundo or<strong>de</strong>n<br />
La gráfica <strong>de</strong> la respuesta <strong>de</strong> este sistema será, para el caso <strong>de</strong> una perturbación () en escalón:
Si<br />
Si<br />
1<br />
H<br />
0 1<br />
H<br />
0<br />
0<br />
p'<br />
t<br />
p'<br />
t<br />
y t m<br />
pt<br />
m<br />
pt<br />
<br />
y t t ut<br />
Kyt e M<br />
t ut<br />
K yt<br />
<br />
e M<br />
<strong>Tema</strong> <strong>9.</strong> <strong>Acciones</strong> <strong>de</strong> <strong>Control</strong><br />
t<br />
t K e<br />
t K e<br />
t dt K De<br />
t<br />
P I <br />
0<br />
t<br />
t K e<br />
t K e<br />
t dt K De<br />
t<br />
P I <br />
0<br />
<br />
D<br />
D<br />
<br />
Escuela <strong>de</strong> Ingeniería Mecánica - ULA<br />
15
16 Teoría <strong>de</strong> <strong>Control</strong><br />
Jean-François DULHOSTE