Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
10 Teoría <strong>de</strong> <strong>Control</strong><br />
El valor en estado estable será:<br />
Y<br />
Jean-François DULHOSTE<br />
EE lim<br />
s0<br />
K<br />
sH<br />
<br />
H<br />
s K sK Según lo supuesto al principio el valor <strong>de</strong>seado para la salida en estado estable <strong>de</strong>bería ser cero, puesto que nuestra<br />
señal <strong>de</strong> referencia es cero, luego este valor en estado estable indica que con este tipo <strong>de</strong> controlador se produce un<br />
error en estado estable que es igual a /.<br />
Estudio <strong>de</strong> la respuesta <strong>de</strong>l sistema<br />
Para analizar la respuesta <strong>de</strong>l sistema en este caso po<strong>de</strong>mos escribir entonces la ecuación <strong>de</strong>l mismo que será:<br />
K H<br />
K Dy Ky H dividiendo por K obtenemos Dy y <br />
K K<br />
Por lo tanto el sistema es un sistema <strong>de</strong> primer or<strong>de</strong>n y respon<strong>de</strong> como tal. Suponiendo que en las condiciones iniciales<br />
la salida toma el valor <strong>de</strong> la señal <strong>de</strong> referencia:<br />
0 0 0 Y<br />
t<br />
La respuesta <strong>de</strong>l sistema será <strong>de</strong> la forma:<br />
H K H<br />
K t<br />
y e <br />
K K<br />
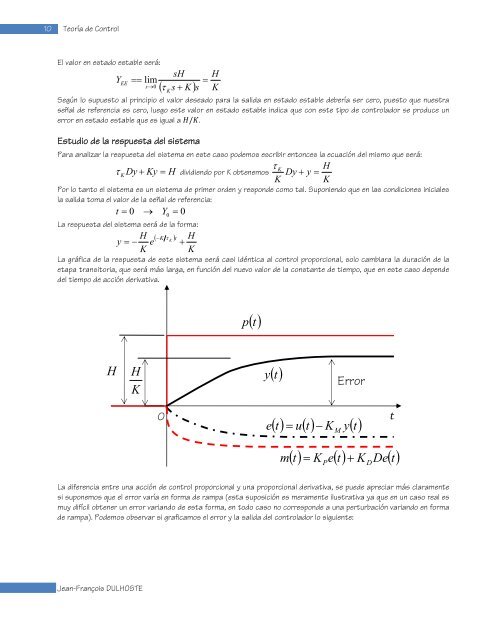
La gráfica <strong>de</strong> la respuesta <strong>de</strong> este sistema será casi idéntica al control proporcional, solo cambiara la duración <strong>de</strong> la<br />
etapa transitoria, que será más larga, en función <strong>de</strong>l nuevo valor <strong>de</strong> la constante <strong>de</strong> tiempo, que en este caso <strong>de</strong>pen<strong>de</strong><br />
<strong>de</strong>l tiempo <strong>de</strong> acción <strong>de</strong>rivativa.<br />
H<br />
0<br />
pt<br />
<br />
La diferencia entre una acción <strong>de</strong> control proporcional y una proporcional <strong>de</strong>rivativa, se pue<strong>de</strong> apreciar más claramente<br />
si suponemos que el error varía en forma <strong>de</strong> rampa (esta suposición es meramente ilustrativa ya que en un caso real es<br />
muy difícil obtener un error variando <strong>de</strong> esta forma, en todo caso no correspon<strong>de</strong> a una perturbación variando en forma<br />
<strong>de</strong> rampa). Po<strong>de</strong>mos observar si graficamos el error y la salida <strong>de</strong>l controlador lo siguiente:<br />
t H y<br />
Error<br />
K<br />
t ut<br />
Kyt e M<br />
t K etKDet<br />
m P<br />
D