Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor
Tema 9. Acciones de Control - Web del Profesor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 Teoría <strong>de</strong> <strong>Control</strong><br />
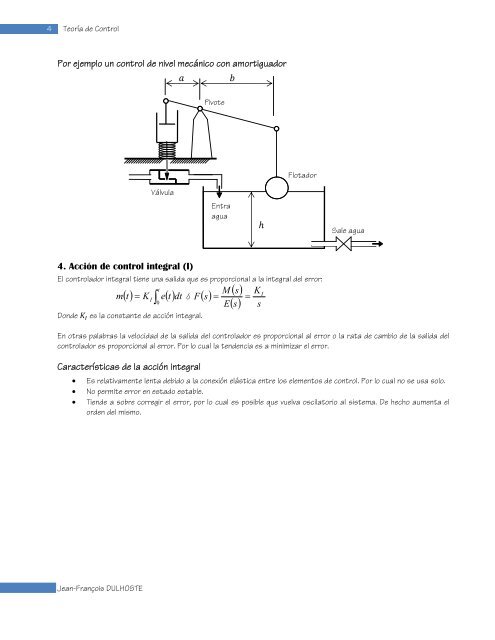
Por ejemplo un control <strong>de</strong> nivel mecánico con amortiguador<br />
4. Acción <strong>de</strong> control integral (I)<br />
El controlador integral tiene una salida que es proporcional a la integral <strong>de</strong>l error:<br />
t<br />
M<br />
m<br />
t K I e<br />
t dt ó <br />
s K I<br />
F s <br />
0<br />
E<br />
s s<br />
Don<strong>de</strong> es la constante <strong>de</strong> acción integral.<br />
En otras palabras la velocidad <strong>de</strong> la salida <strong>de</strong>l controlador es proporcional al error o la rata <strong>de</strong> cambio <strong>de</strong> la salida <strong>de</strong>l<br />
controlador es proporcional al error. Por lo cual la ten<strong>de</strong>ncia es a minimizar el error.<br />
Características <strong>de</strong> la acción integral<br />
Es relativamente lenta <strong>de</strong>bido a la conexión elástica entre los elementos <strong>de</strong> control. Por lo cual no se usa solo.<br />
No permite error en estado estable.<br />
Tien<strong>de</strong> a sobre corregir el error, por lo cual es posible que vuelva oscilatorio al sistema. De hecho aumenta el<br />
or<strong>de</strong>n <strong>de</strong>l mismo.<br />
Jean-François DULHOSTE<br />
Válvula<br />
<br />
Pivote<br />
Entra<br />
agua<br />
<br />
Flotador<br />
Sale agua