Gelenkwellen für Industrie-Anwendungen - GWB
Gelenkwellen für Industrie-Anwendungen - GWB
Gelenkwellen für Industrie-Anwendungen - GWB

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
38<br />
Anwendungstechnische Hinweise<br />
© Spicer <strong>Gelenkwellen</strong>bau GmbH<br />
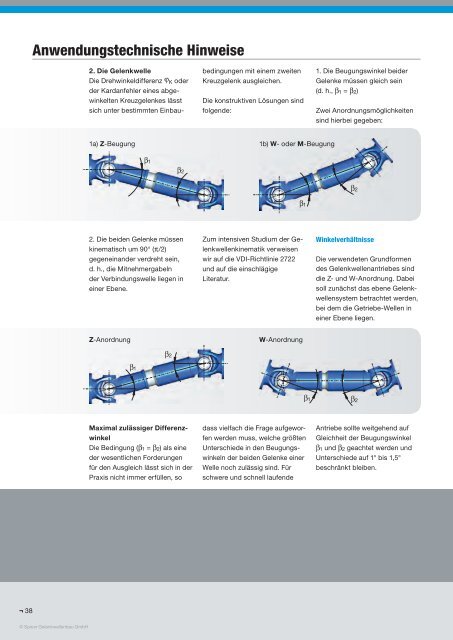
2. Die Gelenkwelle<br />
Die Drehwinkeldifferenz ϕ K oder<br />
der Kardanfehler eines abgewinkelten<br />
Kreuzgelenkes lässt<br />
sich unter bestimmten Einbau-<br />
1a) Z-Beugung<br />
b1<br />
b1<br />
b2<br />
b2<br />
2. Die beiden Gelenke müssen<br />
kinematisch um 90° (p/2)<br />
gegeneinander verdreht sein,<br />
d. h., die Mitnehmergabeln<br />
der Verbindungswelle liegen in<br />
einer Ebene.<br />
Maximal zulässiger Differenzwinkel<br />
Die Bedingung (b1 = b2) als eine<br />
der wesentlichen Forderungen<br />
<strong>für</strong> den Ausgleich lässt sich in der<br />
Praxis nicht immer erfüllen, so<br />
bedingungen mit einem zweiten<br />
Kreuzgelenk ausgleichen.<br />
Die konstruktiven Lösungen sind<br />
folgende:<br />
1b) W- oder M-Beugung<br />
Zum intensiven Studium der <strong>Gelenkwellen</strong>kinematik<br />
verweisen<br />
wir auf die VDI-Richtlinie 2722<br />
und auf die einschlägige<br />
Literatur.<br />
Z-Anordnung W-Anordnung<br />
b1<br />
dass vielfach die Frage aufgeworfen<br />
werden muss, welche größten<br />
Unterschiede in den Beugungswinkeln<br />
der beiden Gelenke einer<br />
Welle noch zulässig sind. Für<br />
schwere und schnell laufende<br />
1. Die Beugungswinkel beider<br />
Gelenke müssen gleich sein<br />
(d. h., b1 = b2)<br />
Zwei Anordnungsmöglichkeiten<br />
sind hierbei gegeben:<br />
b2<br />
Winkelverhältnisse<br />
Die verwendeten Grundformen<br />
des <strong>Gelenkwellen</strong>antriebes sind<br />
die Z- und W-Anordnung. Dabei<br />
soll zunächst das ebene <strong>Gelenkwellen</strong>system<br />
betrachtet werden,<br />
bei dem die Getriebe-Wellen in<br />
einer Ebene liegen.<br />
b1 b2<br />
Antriebe sollte weitgehend auf<br />
Gleichheit der Beugungswinkel<br />
b1 und b2 geachtet werden und<br />
Unterschiede auf 1° bis 1,5°<br />
beschränkt bleiben.