Gelenkwellen für Industrie-Anwendungen - GWB
Gelenkwellen für Industrie-Anwendungen - GWB
Gelenkwellen für Industrie-Anwendungen - GWB

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
46<br />
Anwendungstechnische Hinweise<br />
© Spicer <strong>Gelenkwellen</strong>bau GmbH<br />
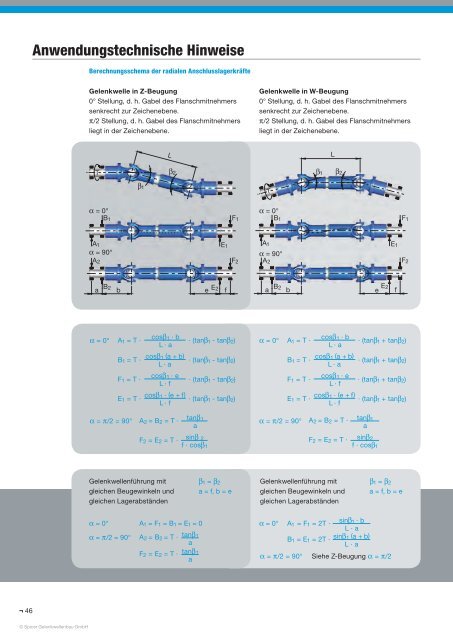
Berechnungsschema der radialen Anschlusslagerkräfte<br />
Gelenkwelle in Z-Beugung<br />
0° Stellung, d. h. Gabel des Flanschmitnehmers<br />
senkrecht zur Zeichenebene.<br />
p/2 Stellung, d. h. Gabel des Flanschmitnehmers<br />
liegt in der Zeichenebene.<br />
T<br />
a = 0°<br />
B1<br />
A1<br />
a = 90°<br />
A2<br />
b1<br />
L<br />
b2<br />
E1<br />
B2<br />
E2<br />
a b e f<br />
a = 0°<br />
a = p/2 = 90°<br />
A2 = B2 = T ·<br />
F2 = E2 = T ·<br />
tanb 1<br />
a<br />
sinb 2<br />
f · cosb 1<br />
F1<br />
F2<br />
cosb 1 · b<br />
A1 = T · · (tanb1 - tanb2)<br />
L · a<br />
cosb 1 (a + b)<br />
B1 = T · · (tanb1 - tanb2)<br />
L · a<br />
cosb 1 · e<br />
F1 = T · · (tanb1 - tanb2)<br />
L · f<br />
cosb 1 · (e + f)<br />
E1 = T · · (tanb1 - tanb2)<br />
L · f<br />
<strong>Gelenkwellen</strong>führung mit b1 = b2<br />
gleichen Beugewinkeln und a = f, b = e<br />
gleichen Lagerabständen<br />
a = 0° A1 = F1 = B1 = E1 = 0<br />
a = p/2 = 90° A2 = B2 = T · tanb 1<br />
a<br />
F2 = E2 = T ·<br />
tanb 1<br />
a<br />
Gelenkwelle in W-Beugung<br />
0° Stellung, d. h. Gabel des Flanschmitnehmers<br />
senkrecht zur Zeichenebene.<br />
p/2 Stellung, d. h. Gabel des Flanschmitnehmers<br />
liegt in der Zeichenebene.<br />
T<br />
a = 0°<br />
B1<br />
A1<br />
a = 90°<br />
A2<br />
B2 a b<br />
a = 0°<br />
a = p/2 = 90°<br />
b1<br />
L<br />
b2<br />
E1<br />
E2<br />
e f<br />
F1<br />
F2<br />
cosb 1 · b<br />
A1 = T · · (tanb1 + tanb2)<br />
L · a<br />
cosb 1 (a + b)<br />
B1 = T · · (tanb1 + tanb2)<br />
L · a<br />
cosb 1 · e<br />
F1 = T · · (tanb1 + tanb2)<br />
L · f<br />
cosb 1 · (e + f)<br />
E1 = T · · (tanb1 + tanb2)<br />
L · f<br />
A2 = B2 = T ·<br />
F2 = E2 = T ·<br />
tanb1<br />
a<br />
sinb 2<br />
f · cosb1<br />
<strong>Gelenkwellen</strong>führung mit b1 = b2<br />
gleichen Beugewinkeln und a = f, b = e<br />
gleichen Lagerabständen<br />
sinb1 a = 0° A1 = F1 = 2T ·<br />
· b<br />
L · a<br />
sinb 1 (a + b)<br />
B1 = E1 = 2T ·<br />
L · a<br />
a = p/2 = 90° Siehe Z-Beugung a = p/2