Ethernet und IP im Kraftfahrzeug - Vector
Ethernet und IP im Kraftfahrzeug - Vector
Ethernet und IP im Kraftfahrzeug - Vector

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Bussysteme llll <strong>IP</strong>-Kommunikation<br />
Nach dem Debüt des CAN-Busses<br />
in der Mercedes-S-Klasse<br />
<strong>im</strong> Jahr 1991 haben sich die<br />
Bussysteme LIN, MOST <strong>und</strong> FlexRay<br />
<strong>im</strong> <strong>Kraftfahrzeug</strong> etabliert. CAN kommt<br />
in aktuellen Pkw-Netzwerkarchitekturen<br />
nach wie vor in allen Domänen (von<br />
Powertrain bis Body) zum Einsatz. Der<br />
LIN-Bus ist prädestiniert für den einfachen<br />
<strong>und</strong> kostengünstigen Datenaustausch<br />
von unkritischen Signalen <strong>im</strong><br />
Komfortbereich. Dort wo Bandbreiten<br />
<strong>und</strong> Echtzeitanforderungen an ihre<br />
Grenzen stoßen, wird CAN – wenn<br />
wirtschaftlich vertretbar – durch Flex-<br />
Ray oder MOST ersetzt. In aktuellen<br />
Fahrzeugen kommen oft alle genannten<br />
Bussysteme zum Einsatz – segmentiert<br />
<strong>und</strong> über Gateways vernetzt.<br />
38 Elektronik automotive 4.2012<br />
<strong>Ethernet</strong> <strong>und</strong> <strong>IP</strong><br />
<strong>im</strong> <strong>Kraftfahrzeug</strong><br />
Neue Anforderungen an das Entwicklungswerkzeug durch<br />
den <strong>Ethernet</strong>- <strong>und</strong> <strong>IP</strong>-Einsatz<br />
Bis vor einigen Jahren herrschte die Meinung, <strong>Ethernet</strong> komme mit Ausnah-<br />
me des Diagnosezugangs nie ins Serienfahrzeug. In Kürze nutzen kamera-<br />
basierte Fahrerassistenzsysteme als erste Anwendungen <strong>Ethernet</strong> als Sy-<br />
stemnetzwerk. Fahrzeughersteller, Zulieferer <strong>und</strong> Hersteller von Entwick-<br />
lungswerkzeugen werden mit neuen Herausforderungen konfrontiert, weil<br />
das Internet-Protokoll <strong>und</strong> <strong>Ethernet</strong> für das Fahrzeug eine neue Netzwerk-<br />
technologie darstellen. Dennoch lassen sich viele Aufgaben bereits lösen.<br />
Von Hans-Werner Schaal<br />
Motivation für <strong>Ethernet</strong><br />
In der Bürokommunikation, der Automatisierungstechnik<br />
mit dem ODVA-<br />
Standard <strong>Ethernet</strong>/<strong>IP</strong> <strong>und</strong> ProfiNet<br />
sowie in der Luftfahrttechnik mit AF-<br />
DX ist <strong>Ethernet</strong> schon seit langem<br />
Standard. Im Automobilbereich hatte<br />
sich <strong>Ethernet</strong> <strong>im</strong> Fahrzeug als Diagnosezugang<br />
bewährt. Weitere Einsatzbereiche<br />
wurden in den letzten Jahren in<br />
den automobilen Forschungs- <strong>und</strong> Entwicklungsabteilungen<br />
verstärkt diskutiert,<br />
denn die verfügbare, skalierbare<br />
Bandbreite <strong>und</strong> die Flexibilität sprachen<br />
stark dafür. Allerdings fehlte<br />
eine für das <strong>Kraftfahrzeug</strong> geeignete<br />
wirtschaftliche Verkabelungstechnologie.<br />
Haupttreiber für den <strong>Ethernet</strong>-Einsatz<br />
<strong>im</strong> Fahrzeug sind aktuell kamerabasierte<br />
Fahrerassistenzsysteme. Bei<br />
Kameraanwendungen <strong>im</strong> Fahrzeug<br />
kam bisher die Low-Voltage-Differential-Signaling-Technologie<br />
(LVDS)<br />
zum Einsatz. Die dort in der Regel<br />
verwendeten geschirmten Kabel sorgen<br />
zwar für die elektromagnetische<br />
Verträglichkeit, sind aber für Branchenverhältnisse<br />
teuer <strong>und</strong> in der Verlegung<br />
<strong>im</strong> <strong>Kraftfahrzeug</strong> wenig praktikabel.<br />
Mittlerweile steht ein Physical<br />
Layer zur Verfügung, der 100 Mbit/s<br />
auf einem CAN-ähnlichen, verdrillten<br />
Zweidraht-Kabel (Unshielded Twisted<br />
Pair) <strong>im</strong> Vollduplex überträgt <strong>und</strong> sich<br />
nach Meinung verschiedener Veröffentlichungen<br />
für den Einsatz <strong>im</strong><br />
<strong>Kraftfahrzeug</strong> geeignet ist [1, 2, 3].<br />
Anforderungen an ein <strong>IP</strong>-Entwicklungswerkzeug<br />
Für das Entwicklungswerkzeug ergeben<br />
sich zunächst die aus bisherigen<br />
Bussystemen bekannten Anforderungen.<br />
Erforderlich ist zunächst eine<br />
detaillierte Protokollanalyse mit St<strong>im</strong>ulationsmöglichkeit<br />
bis hin zu<br />
skriptbasiertem Testen mit automatischer<br />
Erstellung von Testprotokollen.<br />
Auch erwartet der Anwender, dass die<br />
auf dem Markt bewährte Multi-Bus-<br />
Fähigkeit auf <strong>Ethernet</strong> <strong>und</strong> <strong>IP</strong> ausgeweitet<br />
wird, um Abhängigkeiten zwi-
schen Ereignissen auf verschiedenen<br />
Bussystemen opt<strong>im</strong>al untersuchen zu<br />
können. Gegenwärtig interessieren<br />
solche Zusammenhänge beispielsweise<br />
zwischen LIN <strong>und</strong> CAN, zukünftig<br />
zwischen CAN <strong>und</strong> <strong>IP</strong>.<br />
Der Anwender benötigt bei der Protokollanalyse<br />
wie bisher einen einfachen,<br />
symbolischen Zugriff auf alle<br />
relevanten Applikationssignale sowie<br />
die Möglichkeit, diese beliebig logisch<br />
<strong>und</strong> grafisch weiterzuverarbeiten.<br />
Hinzu kommen neue Anforderungen,<br />
die sich einerseits aus der Busphysik<br />
<strong>und</strong> andererseits aus der Protokollvielfalt<br />
von <strong>IP</strong> ergeben. Anhand des aktuellen<br />
Kamerabeispiels <strong>und</strong> vier weiteren<br />
Einsatzbereichen von <strong>IP</strong> <strong>und</strong><br />
<strong>Ethernet</strong> <strong>im</strong> Kfz wird nachfolgend dargestellt,<br />
wie sich diese Messaufgaben<br />
aus Sicht der Systemverantwortlichen<br />
in der Serienentwicklung stellen <strong>und</strong><br />
welche besonderen Anforderungen<br />
sich daraus für das Entwicklungswerkzeug<br />
ergeben.<br />
<strong>Ethernet</strong> als Systemnetzwerk<br />
für die Kamera nutzen<br />
Ein kamerabasiertes Fahrerassistenzsystem<br />
wird bei BMW die erste Serienanwendung<br />
<strong>im</strong> <strong>Kraftfahrzeug</strong> sein,<br />
die <strong>IP</strong> <strong>und</strong> <strong>Ethernet</strong> als Systemnetzwerk<br />
<strong>im</strong> Fahrzeug einsetzt [1]. OEMs<br />
<strong>und</strong> Zulieferer nutzen hierfür den Physical<br />
Layer BroadR-Reach, um gegenüber<br />
der bisher gängigen LVDS-Technologie<br />
Gewicht <strong>und</strong> Kosten einzusparen<br />
[1, 4, 5]. BroadR-Reach wird von<br />
weiteren Anbietern lizensiert [6].<br />
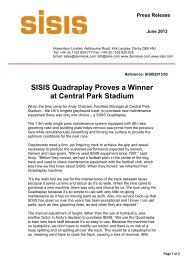
Ein Kamerasystemnetzwerk ist exemplarisch<br />
mit möglichen Messpunkten<br />
in Bild 1 dargestellt. Alternativ<br />
Netzwerktester<br />
Image<br />
Processor<br />
Embedded <strong>Ethernet</strong> System<br />
T<br />
Switch1<br />
Node1<br />
Node2<br />
Switch2<br />
<strong>Ethernet</strong><br />
lassen sich alle Kameras<br />
direkt mit einem<br />
Switch verbinden.<br />
Wie bei den bisher<br />
<strong>im</strong> <strong>Kraftfahrzeug</strong><br />
verwendeten Bussystemen<br />
muss der Datenverkehr<br />
an verschiedenen<br />
Punkten<br />
<strong>im</strong> Netzwerk beobachtet,<br />
analysiert <strong>und</strong><br />
zeitsynchron verglichen<br />
werden. Die<br />
Mess-Hardware muss<br />
daher zunächst die<br />
aktuelle Busphysik<br />
unterstützen, bei-<br />
spielsweise BroadR-Reach, aber auch<br />
für zukünftige Physical Layer offen<br />
sein. Wünschenswert ist ein mehrkanaliger<br />
Abgriff über T-Stücke, der das<br />
Systemnetzwerk be<strong>im</strong> Monitoring<br />
möglichst wenig beeinflusst. Zur Validierung<br />
der Systemfunktion sollte<br />
das T-Stück auch Fehler einfügen können.<br />
Über die Analyse hinausgehend<br />
ist auch die St<strong>im</strong>ulation oder gar die<br />
S<strong>im</strong>ulation ganzer Teile des Netzwerks<br />
erforderlich (Restbuss<strong>im</strong>ulation). Das<br />
bringt einige Herausforderungen an<br />
die Mess-Hardware mit sich.<br />
Eine Kameraapplikation stellt hohe<br />
Anforderungen an Zeitsynchronisation<br />
<strong>und</strong> Quality of Service (QoS) [4].<br />
Diese sollen durch Protokollerweiterungen<br />
des Audio-Video-Bridging-<br />
Standards (AVB) gelöst werden [7].<br />
Nachdem sich die Hersteller hinsichtlich<br />
der Bit-Übertragungsschicht (OSI-<br />
Layer 1) praktisch einig sind, wird aus<br />
Kosten- <strong>und</strong> Testgründen auch eine<br />
Vereinheitlichung der höheren Schichten<br />
angestrebt.<br />
Allein aufgr<strong>und</strong><br />
der bei der Kameraapplikationverwendeten<br />
Protokolle gibt<br />
es neue Anforderungen<br />
an die Mess-Software,<br />
damit beliebige<br />
Signale aus der Pay-<br />
T<br />
Node3<br />
Node4<br />
Node5<br />
l Bild 1. Zuverlässige Analyse von kamerabasierten Fahrerassis-<br />
tenzsystemen erfordert das Abgreifen des Datenverkehrs an mehreren<br />
Stellen des <strong>Ethernet</strong>-Netzwerks, idealerweise über „T-Stücke“<br />
mit geringstmöglichem Zeitversatz <strong>und</strong> mit Darstellung auf<br />
gemeinsamer Zeitbasis.<br />
7 Anwendung<br />
6 Darstellung<br />
5 Sitzung<br />
4 Transport<br />
3 Vermittlung<br />
2 Sicherung<br />
1 Übertragung<br />
Diagnosezugang<br />
Do<strong>IP</strong><br />
TCP/<strong>IP</strong><br />
UDP<br />
<strong>IP</strong>v4/<br />
<strong>IP</strong>v6<br />
100-<br />
Base-Tx<br />
load der verschiedenen<br />
<strong>und</strong> durchaus<br />
komplexen Protokolle<br />
applikationsgerecht<br />
präsentiert <strong>und</strong> manipuliert<br />
werden können.<br />
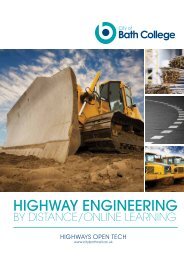
Bild 2 (nach [7]<br />
<strong>und</strong> <strong>Vector</strong>) zeigt die<br />
für AVB zum Einsatz<br />
kommenden Proto-<br />
Audio/Video<br />
Zeitsync.<br />
AVB<br />
IEEE<br />
1722<br />
802.1AS<br />
IEEE <strong>Ethernet</strong> MAC +<br />
VLAN (802.1Q)<br />
BroadR-<br />
Reach<br />
<strong>IP</strong>-Kommunikation llll Bussysteme<br />
Smart<br />
Grid<br />
ISO<br />
15118<br />
Part 1 (2) SOME/<strong>IP</strong> Bonjour DHCPv6<br />
DHCP<br />
ISO<br />
15118<br />
Part 2<br />
ISO<br />
15118<br />
Part 3<br />
Control<br />
Kommunikation<br />
TCP/<strong>IP</strong><br />
UDP<br />
Dienst-<br />
Konguration<br />
erkennung<br />
der<br />
Adressen<br />
kolle in den Spalten Audio/Video <strong>und</strong><br />
Control-Kommunikation. Hinzu kommen<br />
Protokolle zur Bandbreitenreservierung<br />
<strong>und</strong> weitere Netzwerk-Management-Protokolle,<br />
siehe auch die<br />
vier rechten Spalten in Bild 2. Diese<br />
<strong>und</strong> weitere in der Grafik aufgeführte<br />
Protokolle kommen aufgr<strong>und</strong> der <strong>im</strong><br />
Folgenden betrachteten Anwendungsfälle<br />
hinzu.<br />
Diagnosezugang <strong>im</strong> Blickpunkt<br />
UDP<br />
Über die Technologie Diagnostics over<br />
<strong>IP</strong> (Do<strong>IP</strong>) ist es möglich, alle angeschlossenen<br />
Steuergeräte verschiedener<br />
Bussysteme zentral über einen<br />
leistungsfähigen <strong>Ethernet</strong>-Zugang zu<br />
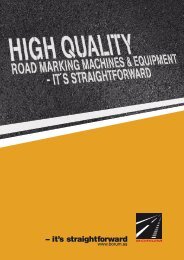
flashen (Bild 3). Die Systementwicklung<br />
des OEM muss diesen Dienst<br />
valide absichern. Weil ein Steuergerät<br />
als Gateway eingesetzt wird, besteht<br />
großes Interesse, die Übertragung der<br />
Diagnosedaten nicht nur auf Seite der<br />
angeschlossenen Bussysteme zu analysieren,<br />
sondern auch auf <strong>IP</strong>-Seite.<br />
Relevant sind die Protokolle ISO<br />
13400 <strong>und</strong> <strong>IP</strong>v4, gegebenenfalls auch<br />
<strong>IP</strong>v6.<br />
Intelligentes Laden<br />
<strong>IP</strong>v4/<strong>IP</strong>v6<br />
ICMPv6<br />
ICMP<br />
IEEE <strong>Ethernet</strong> MAC + VLAN (802.1Q)<br />
Automotive <strong>Ethernet</strong> Physical Layer<br />
(z.B. BroadR-Reach)<br />
Auösung der Adresse,<br />
Signallisierung etc.<br />
l Bild 2. <strong>IP</strong>-Protokolle automobiler Anwendungen <strong>im</strong> OSI-Referenz-<br />
modell aufgetragen (Spalten links) inklusive Verwaltungsfunktionen<br />
(Spalten rechts): Sowohl neue Protokolle (rot) als auch aus<br />
der Bürokommunikation bekannte (blau) werden verwendet.<br />
NDP<br />
ARP<br />
Das intelligente Laden, auch Smart-<br />
Charging genannt, geht weit über das<br />
einfache Anstecken an die Haushaltssteckdose<br />
hinaus. Das zu ladende<br />
Elektrofahrzeug ist über eine Ladestation<br />
an das Stromnetz (Grid) angeschlossen.<br />
Ladevorgänge starten nicht<br />
einfach, sondern melden den Bedarf<br />
erst einmal an. Durch die Verzögerung<br />
einzelner Ladevorgänge um Bruchteile<br />
von Minuten lassen sich Überlastungen<br />
des Grids vermeiden. Weiter<br />
Elektronik automotive 4.2012 39
Bussysteme llll <strong>IP</strong>-Kommunikation<br />
Diagnosetester<br />
Do<strong>IP</strong>/<strong>Ethernet</strong><br />
Netzwerktester<br />
<strong>Ethernet</strong><br />
Switch/„T”<br />
Diagnose<br />
Gateway<br />
CAN<br />
LIN<br />
MOST<br />
FlexRay<br />
lassen sich angeschlossene Fahrzeuge<br />
als Speicher nutzen; die Abrechnung<br />
mit dem Stromversorger kann automatisiert<br />
erfolgen.<br />
Das ermöglicht die Kommunikation<br />
zwischen Fahrzeug <strong>und</strong> Ladestation<br />
über <strong>Ethernet</strong> auf <strong>IP</strong>-basierten Protokollen,<br />
deren Standardisierung in der<br />
Norm ISO 15118 festgelegt ist. Die Ladestation<br />
kommuniziert dabei mit dem<br />
Grid <strong>und</strong> dem Fahrzeug. Für den Systemverantwortlichen<br />
be<strong>im</strong> Fahrzeughersteller<br />
ist die Kommunikation des<br />
Pkw mit der Ladestation wichtig. Um<br />
den Ladeprozess sicherzustellen, ist<br />
eine detaillierte Analyse <strong>und</strong> Validierung<br />
der Protokolle unumgänglich. Das<br />
Entwicklungswerkzeug muss auch die-<br />
40 Elektronik automotive 4.2012<br />
CAN ECU<br />
LIN ECU<br />
MOST ECU<br />
FlexRay ECU<br />
l Bild 3. Bei der Validierung von Do<strong>IP</strong> an einem Gateway ist die Darstellung des Daten-<br />
verkehrs sowohl auf der Do<strong>IP</strong>-Seite (links des Gateways) als auch auf allen angeschlossenen<br />
Bussystemen (rechts des Gateways) wichtig. Idealerweise werden alle<br />
Botschaften aller Netzwerke auf einer gemeinsamen Zeitbasis abgetragen.<br />
se Protokolle unterstützen<br />
(Spalte Smart<br />
Grid in Bild 2).<br />
Kalibrieren, Debuggen<br />
<strong>und</strong> Flashen<br />
<strong>Ethernet</strong> mit dem<br />
Mess- <strong>und</strong> Kalibrierprotokoll<br />
XCP wird<br />
in der Entwicklung<br />
für das Kalibrieren,<br />
Debuggen <strong>und</strong> Flashen<br />
der Steuergeräte<br />
schon mehrere Jahre<br />
genutzt. In der Serie<br />
steht aus Kostengründen<br />
der <strong>Ethernet</strong>-Zugang<br />
gar nicht mehr<br />
zur Verfügung. Deshalb<br />
wird derzeit über das vorliegende<br />
Arbeitsprotokoll, beispielsweise CCP<br />
oder XCP on CAN, kalibriert <strong>und</strong> reprogrammiert.<br />
Wenn aber in naher<br />
Zukunft <strong>Ethernet</strong> ins Fahrzeug einzieht,<br />
wäre das Messen <strong>und</strong> Kalibrieren<br />
über XCP on <strong>Ethernet</strong> aufgr<strong>und</strong><br />
der deutlich höheren Messdatenrate<br />
auch in der Serie attraktiv.<br />
WLAN <strong>und</strong> Car-2-X<br />
l Bild 4. CANoe.<strong>IP</strong> unterstützt die Entwicklung, S<strong>im</strong>ulation <strong>und</strong> Test von Embedded-Syste-<br />
men, die über <strong>IP</strong> oder <strong>Ethernet</strong> kommunizieren.<br />
Car-2-X bezeichnet die externe Kommunikation<br />
zwischen Fahrzeugen <strong>und</strong><br />
Infrastruktur. Die Anwendungen reichen<br />
von Komfortfunktionen über<br />
Verkehrsfluss-Opt<strong>im</strong>ierung bis hin<br />
zur Erhöhung der Verkehrssicherheit<br />
durch Fahrerassistenzsysteme.<br />
Die<br />
Technologie befindet<br />
sich bereits in<br />
der Vorserienentwicklung<br />
<strong>und</strong> die<br />
Standardisierung ist<br />
weit fortgeschritten.<br />
Sie ist <strong>IP</strong>-basiert;<br />
als Physical Layer<br />
wird der Standard<br />
IEEE 802.11p genutzt.<br />
Das messtechnische<br />
Interesse bei<br />
Car-2-X-Anwendungen<br />
dehnt sich<br />
aus Sicht der Systemverantwortlichen<br />
über die Grenze<br />
des eigenen<br />
Fahrzeugs hinweg<br />
auf eine Anzahl von<br />
Fahrzeugen <strong>und</strong> Roadside-Units<br />
(RSUs) <strong>im</strong> Nahbereich aus. Das zu<br />
evaluierende Steuergerät kommuniziert<br />
nicht nur mit den an Bord befindlichen<br />
Bussystemen, sondern auch<br />
über die Luftschnittstelle mit anderen<br />
Verkehrsteilnehmern. Das Entwicklungswerkzeug<br />
muss daher auch diese<br />
<strong>IP</strong>-basierten Standards unterstützen.<br />
Daneben ergeben sich weitere Anforderungen<br />
<strong>im</strong> Hochfrequenzbereich,<br />
zum Beispiel WLAN <strong>im</strong> 5-GHz-<br />
Band.<br />
Protokollvielfalt für Anwendungen<br />
<strong>und</strong> Messwerkzeug<br />
In Bild 2 sind exemplarisch die verschiedenen,<br />
von der Anwendung abhängigen<br />
Übertragungsschichten <strong>und</strong><br />
Protokolle zusammengefasst, die das<br />
Entwicklungswerkzeug allein aufgr<strong>und</strong><br />
der bisher behandelten Fälle<br />
unterstützen muss. Einige der <strong>im</strong> Bereich<br />
der Bürokommunikation verwendeten<br />
Protokolle finden sich hier<br />
wieder. Viele davon sind verzichtbar,<br />
andere kommen hinzu. Die blau gekennzeichneten<br />
Protokolle können aus<br />
der Bürokommunikation übernommen<br />
werden. Jene, die aufgr<strong>und</strong> der neuen,<br />
automobilen Anwendung hinzukommen,<br />
sind rot dargestellt.<br />
Das Messsystem hat die Aufgabe,<br />
alle relevanten Protokolle aufzulösen<br />
<strong>und</strong> alle Netzwerkereignisse in einen<br />
kausalen Bezug zu stellen (korrekte<br />
Reihenfolge). Dabei ist es wünschenswert,<br />
alle Busdomänen auf einer gemeinsamen<br />
Zeitbasis mit ausreichender<br />
Genauigkeit darstellen zu können.<br />
Absicherung<br />
von <strong>IP</strong>-Serienprojekten<br />
Wie die Betrachtung der obigen Anwendungsfälle<br />
zeigt, machen es Kausalitäts-<br />
oder gar Zeitbetrachtungen<br />
über mehrere Bussysteme hinweg<br />
schwierig bis unmöglich, Standard-<br />
<strong>Ethernet</strong>-Tools aus der Bürokommunikation<br />
für Multi-Bus-Anwendungen<br />
<strong>im</strong> Fahrzeug nutzen. <strong>Ethernet</strong> <strong>im</strong> Bürobereich<br />
ist eben nicht gleich <strong>Ethernet</strong><br />
<strong>im</strong> Automotive-Bereich. Dasselbe gilt<br />
für die jeweils eingesetzten Internetprotokolle.<br />
Diese unterscheiden sich je<br />
nach Anwendung in Art <strong>und</strong> Komplexität<br />
genauso deutlich wie die Anforderungen<br />
an den Physical Layer.
Um die Signalstruktur der Protokolle<br />
<strong>im</strong> Entwicklungswerkzeug darzustellen<br />
<strong>und</strong> den Embedded Code zu<br />
generieren, ist ein geeignetes Engineering-Format<br />
wichtig. Hierfür haben<br />
sich bei CAN das DBC-Format <strong>und</strong><br />
bei FlexRay FIBEX durchgesetzt. Für<br />
das neue <strong>Ethernet</strong>- <strong>und</strong> <strong>IP</strong>-basierte<br />
Systemnetzwerk reicht das DBC-Format<br />
als Datenbankformat nicht mehr<br />
aus. Es wäre aus Sicht der Werkzeugzulieferer<br />
hilfreich, wenn sich die<br />
OEMs auf ein gemeinsames Engineering-Format<br />
einigen könnten. Geeignete<br />
Kandidaten wären FIBEX 4.0 <strong>und</strong><br />
die AUTOSAR System Description.<br />
Erfahrungen aus anderen Industriebereichen<br />
zeigen, dass danach von Werkzeugherstellern<br />
zeitnah geeignete Entwicklungswerkzeuge<br />
für Analyse <strong>und</strong><br />
Code-Generierung zur Verfügung gestellt<br />
werden.<br />
Zukünftige<br />
Fahrzeugnetzwerke<br />
CAN wird noch deutlich länger als<br />
zehn Jahre <strong>im</strong> Pkw zu finden sein, alle<br />
anderen hier besprochenen Bussysteme<br />
mindestens zehn Jahre. Dennoch<br />
legen die Anwendungen durch steigende<br />
Anforderungen in Hinsicht auf<br />
Bandbreite, Flexibilität <strong>und</strong> Wirtschaftlichkeit<br />
den Einsatz von <strong>IP</strong> <strong>und</strong><br />
<strong>Ethernet</strong> <strong>im</strong>mer stärker nahe. In den<br />
nächsten Jahren werden wie bisher<br />
mehrere über Gateways vernetzte Bussysteme<br />
vorzufinden sein – <strong>Ethernet</strong><br />
<strong>und</strong> <strong>IP</strong> kommen einfach noch dazu.<br />
Wie bei der Kameraapplikation wird<br />
es auch bei zukünftigen <strong>IP</strong>-Anwendungen<br />
neue Herausforderungen auf<br />
allen Protokollebenen geben, die aber<br />
mit geeigneten Entwicklungswerkzeugen<br />
zu lösen sind.<br />
Ausblick auf <strong>IP</strong>-Entwicklungswerkzeuge<br />
Für den Automotive-Bereich empfehlen<br />
sich nach wie vor dafür konzipierte<br />
Entwicklungswerkzeuge. Diese<br />
müssen einerseits alle Protokollebenen<br />
unterstützen, sich aber andererseits<br />
auch in die branchentypische Werkzeuglandschaft<br />
einpassen. Für die Absicherung<br />
von Serienprojekten be<strong>im</strong><br />
OEM sind insbesondere die Zulieferer<br />
darauf angewiesen, dass geeignete<br />
Entwicklungswerkzeuge zur Verfügung<br />
stehen. Das schließt den Support<br />
<strong>und</strong> idealerweise auch<br />
die Unterstützung bei<br />
CANoe.<strong>IP</strong><br />
der Einführung durch<br />
den Werkzeughersteller<br />
mit ein.<br />
Basierend auf dem<br />
Windows PC<br />
bewährten S<strong>im</strong>ulations-<br />
<strong>und</strong> Testwerkzeug<br />
CANoe von<br />
<strong>Vector</strong> Informatik l<br />
deckt die Option <strong>IP</strong><br />
die genannten Anforderungen<br />
an ein <strong>Ethernet</strong>-Entwicklungswerkzeug<br />
bereits ab. Durch die<br />
vielfältigen <strong>Ethernet</strong>-spezifischen<br />
Funktionen <strong>und</strong> die Multi-Bus-Fähigkeit<br />
kann CANoe.<strong>IP</strong> helfen, die Entwicklungszeit<br />
zu reduzieren, wodurch<br />
sich wertvolle Ressourcen zielführend<br />
applikationsseitig einsetzen lassen<br />
(Bild 4). CANoe.<strong>IP</strong> für die automobile<br />
Netzwerkentwicklung weist denselben<br />
Entwicklungskomfort auf, wie es<br />
für die etablierten Bussysteme CAN,<br />
LIN, MOST <strong>und</strong> FlexRay Standard ist.<br />
Dabei ist das Entwicklungswerkzeug<br />
in hohem Maße skalierbar <strong>und</strong> verfügt<br />
prinzipiell über drei Interface-Möglichkeiten<br />
(Bild 5). Im einfachsten Fall<br />
1 arbeitet es mit beliebigen auf einem<br />
Windows-Rechner vorhandenen Netzwerkkarten<br />
zusammen. Kommt<br />
BroadR-Reach zum Einsatz oder sollen<br />
auch Fehler eingefügt werden,<br />
kann als Hardware-Interface zukünftig<br />
die VN56xx-Familie genutzt werden<br />
(Fall 2). Dadurch erhöht sich die<br />
Zeitsynchronität zwischen den <strong>IP</strong>-<br />
Kanälen <strong>und</strong> zu anderen Bussystemen<br />
erheblich. Ist Echtzeitverhalten gefordert,<br />
dann kann in Zukunft CANoe.<strong>IP</strong><br />
in Verbindung mit der Echtzeit-Hardware<br />
VN8900 betrieben werden, die<br />
mit der Interface-Hardware VN56xx<br />
nahtlos zusammenarbeitet (Fall 3).<br />
eck<br />
Literatur + Links<br />
[1] Bogenberger, R., BMW AG: <strong>IP</strong> & <strong>Ethernet</strong><br />
as potential mainstream automotive<br />
technologies. Product Day Hanser<br />
Automotive. Fellbach, 2011.<br />
[2] Neff, A., Matheeus, K, et al.: <strong>Ethernet</strong> & <strong>IP</strong><br />
als applikativer Fahrzeugbus am<br />
Einsatzszenario kamerabasierter<br />
Fahrerassistenzsysteme. VDI-Berichte<br />
2132, Elektronik <strong>im</strong> <strong>Kraftfahrzeug</strong>.<br />
Baden-Baden, 2011. S. 491 – 495.<br />
[3] Streichert, T., Da<strong>im</strong>ler AG: Short and<br />
Longterm Perspective of <strong>Ethernet</strong> for<br />
Vehicle-internal Communications. 1st<br />
<strong>Ethernet</strong> & <strong>IP</strong> @ Automotive Technology<br />
Fall 1<br />
GBE<br />
Fall 2<br />
USB<br />
Fall 3<br />
USB<br />
<strong>IP</strong>-Kommunikation llll Bussysteme<br />
VN89xx<br />
VN56xx<br />
VN56xx<br />
100/1.000 BT<br />
100/1.000 BT<br />
BroadR-Reach<br />
100/1.000 BT<br />
BroadR-Reach<br />
Bild 5. CANoe.<strong>IP</strong> mit skalierbaren Hardware-Interfaces <strong>und</strong> optio-<br />
naler Echtzeitunterstützung (Bilder: <strong>Vector</strong> Informatik)<br />
Day, BMW, München, 2011.<br />
[4] Nöbauer, J., Continental AG: Migration<br />
from MOST and FlexRay Based Networks<br />
to <strong>Ethernet</strong> by Maintaining QoS. 1st<br />
<strong>Ethernet</strong> & <strong>IP</strong> @ Automotive Technology<br />
Day, BMW, München, 2011.<br />
[5] Powell, S. R., Broadcom Corporation:<br />
<strong>Ethernet</strong> Physical Layer Alternatives for<br />
Automotive Applications. 1st <strong>Ethernet</strong> &<br />
<strong>IP</strong> @ Automotive Technology Day, BMW,<br />
München, 2011.<br />
[6] NXP Develops Automotive <strong>Ethernet</strong><br />
Transceivers for In-Vehicle Networks.<br />
November 09, 2011, www.nxp.com/<br />
news/press-releases/2011/11/nxp-develops-automotive-ethernet-transceiversfor-in-vehicle-networks.html.<br />
[7] Völker, L., BMW AG: One for all,<br />
Interoperability from AUTOSAR to<br />
Genivi. 1st <strong>Ethernet</strong> & <strong>IP</strong> @ Automotive<br />
Technology Day, BMW, München, 2011.<br />
Dipl.-Ing.<br />
Hans-Werner Schaal<br />
studierte Nachrichtentechnik an der Universität<br />
Stuttgart <strong>und</strong> Electrical & Computer Engineering<br />
an der Oregon State University in Oregon,<br />
USA. Er ist Business Development Manager<br />
bei der <strong>Vector</strong> Informatik GmbH <strong>im</strong> Bereich<br />
der Produktlinie Open Networking. Zuvor<br />
war er Entwicklungsingenieur, Projektleiter<br />
<strong>und</strong> Produktmanager in verschiedenen Branchen<br />
<strong>im</strong> Bereich Testwerkzeuge für mehrere<br />
Netzwerk-Technologien.<br />
hans-werner.schaal@vector.com<br />
Elektronik automotive 4.2012 41