Ein Linearantrieb für ein magnetisch gelagertes, autonomes ...
Ein Linearantrieb für ein magnetisch gelagertes, autonomes ...
Ein Linearantrieb für ein magnetisch gelagertes, autonomes ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
egler ist als Toleranzbandstromregler realisiert. Alternativ hierzu wurde auch <strong>ein</strong> PWM-<br />
Stromregler getestet, der zur Toleranzbandstromregelung vergleichbare Ergebnisse liefert.<br />
Beim PWM-Stromregler kann jedoch durch geeignete Parametrierung des Reglers die Geräuschentwicklung<br />
des Motors deutlich verringert werden. Beim Aufbau des Versuchsstandes<br />
und dem Entwurf der Regelung wurde Wert darauf gelegt, möglichst viele Teile als Software<br />
zu implementieren, um <strong>ein</strong>e große Flexibilität zu erhalten.<br />
Die zur Regelung benötigte aktuelle Geschwindigkeit wird durch Filterung und Differenzierung<br />
aus dem Positionssignal gewonnen. Als Filter kommt dabei <strong>ein</strong> Butterworth-Tiefpass<br />
zweiter Ordnung mit <strong>ein</strong>er Grenzfrequenz von 10 Hz zum <strong>Ein</strong>satz. Das Positionssignal wird<br />
ebenfalls zur phasenrichtigen Bestromung des Motors verwendet.<br />
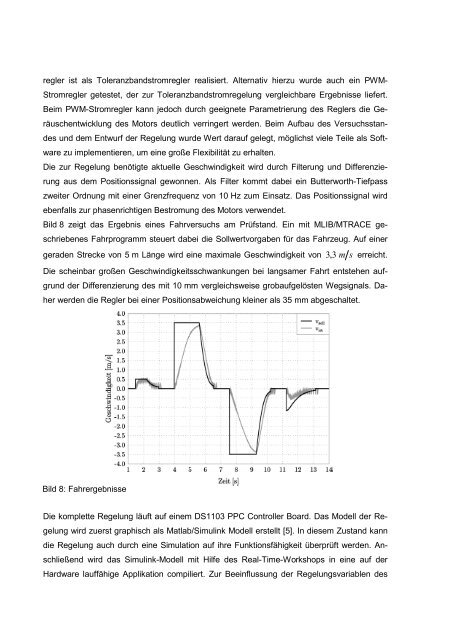
Bild 8 zeigt das Ergebnis <strong>ein</strong>es Fahrversuchs am Prüfstand. <strong>Ein</strong> mit MLIB/MTRACE geschriebenes<br />
Fahrprogramm steuert dabei die Sollwertvorgaben <strong>für</strong> das Fahrzeug. Auf <strong>ein</strong>er<br />
geraden Strecke von 5 m Länge wird <strong>ein</strong>e maximale Geschwindigkeit von 3, 3 m s erreicht.<br />
Die sch<strong>ein</strong>bar großen Geschwindigkeitsschwankungen bei langsamer Fahrt entstehen aufgrund<br />
der Differenzierung des mit 10 mm vergleichsweise grobaufgelösten Wegsignals. Daher<br />
werden die Regler bei <strong>ein</strong>er Positionsabweichung kl<strong>ein</strong>er als 35 mm abgeschaltet.<br />
Bild 8: Fahrergebnisse<br />
Die komplette Regelung läuft auf <strong>ein</strong>em DS1103 PPC Controller Board. Das Modell der Regelung<br />
wird zuerst graphisch als Matlab/Simulink Modell erstellt [5]. In diesem Zustand kann<br />
die Regelung auch durch <strong>ein</strong>e Simulation auf ihre Funktionsfähigkeit überprüft werden. Anschließend<br />
wird das Simulink-Modell mit Hilfe des Real-Time-Workshops in <strong>ein</strong>e auf der<br />
Hardware lauffähige Applikation compiliert. Zur Be<strong>ein</strong>flussung der Regelungsvariablen des