Versuch V16: Der Phasenregelkreis als nichtlineares System 2 ...
Versuch V16: Der Phasenregelkreis als nichtlineares System 2 ...
Versuch V16: Der Phasenregelkreis als nichtlineares System 2 ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Technische Universität Dresden<br />
Fakultät Elektrotechnik und Informationstechnik<br />
Institut für Regelungs- und Steuerungstheorie<br />
R S T<br />
Anleitung für das Regelungstechnische Praktikum<br />
<strong>Versuch</strong> V 16 : <strong>Der</strong> <strong>Phasenregelkreis</strong> <strong>als</strong> <strong>nichtlineares</strong> <strong>System</strong> 2. Ordnung<br />
<strong>Versuch</strong>sziel : Untersuchung der Einschwingvorgänge des nichtlinearen<br />
analogen PLL<br />
1 Einführung<br />
PSfrag replacements<br />
VA 16<br />
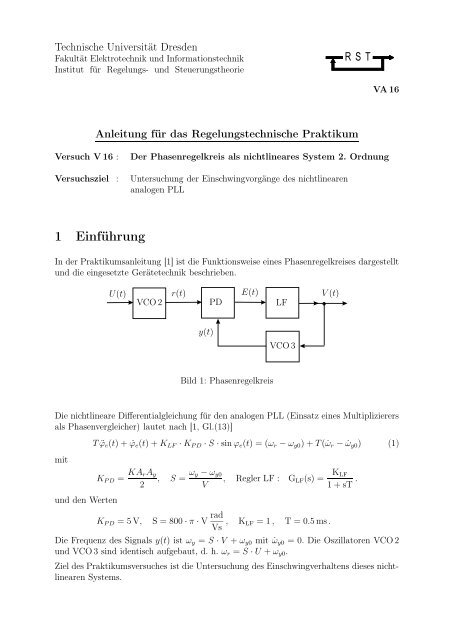
In der Praktikumsanleitung [1] ist die Funktionsweise eines <strong>Phasenregelkreis</strong>es dargestellt<br />
und die eingesetzte Gerätetechnik beschrieben.<br />
U(t) VCO 2<br />
r(t)<br />
y(t)<br />
PD<br />
E(t)<br />
Bild 1: <strong>Phasenregelkreis</strong><br />
LF<br />
VCO 3<br />
V (t)<br />
Die nichtlineare Differentialgleichung für den analogen PLL (Einsatz eines Multiplizierers<br />
<strong>als</strong> Phasenvergleicher) lautet nach [1, Gl.(13)]<br />
mit<br />
und den Werten<br />
T ¨ϕe(t) + ˙ϕe(t) + KLF · KP D · S · sin ϕe(t) = (ωr − ωy0) + T ( ˙ωr − ˙ωy0) (1)<br />
KP D = KArAy<br />
2<br />
, S = ωy − ωy0<br />
, Regler LF : GLF(s) =<br />
V<br />
KLF<br />
1 + sT .<br />
KP D = 5 V, S = 800 · π · V rad<br />
Vs , KLF = 1 , T = 0.5 ms .<br />
Die Frequenz des Sign<strong>als</strong> y(t) ist ωy = S · V + ωy0 mit ˙ωy0 = 0. Die Oszillatoren VCO 2<br />
und VCO 3 sind identisch aufgebaut, d. h. ωr = S · U + ωy0.<br />
Ziel des Praktikumsversuches ist die Untersuchung des Einschwingverhaltens dieses nichtlinearen<br />
<strong>System</strong>s.
Praktikumsanleitung VA 16 2<br />
1.1 Diskussion der Differentialgleichung (1)<br />
Die Differentialgleichung (1) läßt sich <strong>als</strong> <strong>System</strong> von zwei Differentialgleichungen 1. Ordnung<br />
wie folgt beschreiben<br />
˙x1 = f1(x1, x2) = x2<br />
˙x2 = f2(x1, x2, z) = −αx2 − β sin x1 + z, (2)<br />
mit<br />
x1 = ϕe, x2 = ˙ϕe, α = 1<br />
T > 0, β = KLF KP DS<br />
T<br />
> 0, z(t) = ωr − ωy0<br />
T<br />
Das Verhalten des <strong>System</strong>s wird für mehrere Arten der Erregung z(t) untersucht:<br />
+ ˙ωr. (3)<br />
1) Erregung z(t)=0; <strong>System</strong>verhalten aus dem gegebenen Anfangszustand:<br />
d. h. U(t) = 0, ωr = ωy0 . x1(0) = ϕe(0) = ϕr(0) − ϕy(0)<br />
x2(0) = ˙ϕe(0) = ˙ϕr(0) − ˙ϕy(0)<br />
Wir suchen nach „Gleichgewichts“-Lösungen von (2), für die ˙x1 = ˙x2 = 0 gilt. Diese<br />
Lösungen nennen wir GG-Punkte (Gleichgewichts-Punkte) in der Zustandsebene. Die<br />
= k π ; k ∈ Z .<br />
GG-Punkte ergeben sich zu x ss<br />
2<br />
= 0 ; xss<br />
1<br />
Das <strong>System</strong> wird um x ss linearisiert. Für gerade k erhält man das linearisierte Dgls.<br />
˙ξ = Agξ mit der Jacobi-Matrix<br />
Ag =<br />
<br />
∂f1<br />
∂x1<br />
∂f2<br />
∂x1<br />
∂f1<br />
∂x2<br />
∂f2<br />
∂x2<br />
<br />
<br />
<br />
(xss 1 ,xss<br />
=<br />
2 )<br />
0 1<br />
−β −α<br />
für ungerade k erhält man ˙ ξ = Auξ mit der Jacobi-Matrix<br />
Au =<br />
<br />
∂f1<br />
∂x1<br />
∂f2<br />
∂x1<br />
∂f1<br />
∂x2<br />
∂f2<br />
∂x2<br />
<br />
<br />
<br />
(xss 1 ,xss<br />
=<br />
2 )<br />
Aus den Nullstellen des charakteristischen Polynoms<br />
folgen die Eigenwerte von Ag<br />
0 1<br />
β −α<br />
det(sI − Ag) = s 2 + αs + β = 0<br />
s1/2 = − α<br />
2 ±<br />
<br />
α2 − β .<br />
4<br />
Aus den Nullstellen des charakteristischen Polynoms<br />
folgen die Eigenwerte von Au<br />
det(sI − Au) = s 2 + αs − β = 0<br />
s1/2 = − α<br />
2 ±<br />
<br />
α2 + β .<br />
4<br />
Für den Charakter der GG-Punkte gilt<br />
- k gerade: Re s1/2 < 0, <strong>als</strong>o stabiler Knoten- oder Strudelpunkt,<br />
- k ungerade: s1 < 0 < s2, <strong>als</strong>o Sattelpunkt .<br />
<br />
, (4)<br />
<br />
. (5)
ag replacements<br />
Praktikumsanleitung VA 16 3<br />
Bild 2 zeigt den nichtlinearen Fluß für einen Ausschnitt der Zustandsebene (Simulation<br />
mit MATLAB):<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
3000<br />
2000<br />
1000<br />
0<br />
−1000<br />
−2000<br />
−3000<br />
−3 −2 −1 0 1 2 3<br />
x1 = ϕe<br />
π<br />
<br />
<br />
Bild 2: Trajektorienverläufe für z(t) = 0,<br />
2) Konstante Erregung z(t) = const. = γ<br />
a) Es soll gelten: γ<br />
β<br />
< 1, d. h. U < 5 V<br />
γ<br />
β<br />
<br />
<br />
= 0, d. h. U = 0 V<br />
Es gibt Gleichgewichtslösungen von (2) für die ˙x1 = ˙x2 = 0 gilt. Die GG-Punkte sind<br />
x ss1 = (x ss1<br />
1 ; x ss1<br />
<br />
2 ) = arcsin γ<br />
<br />
+ 2kπ; 0<br />
β<br />
x ss2 = (x ss2<br />
1 ; x ss2<br />
<br />
2 ) = arcsin γ<br />
<br />
+ (2k + 1)π; 0<br />
β<br />
wobei k ∈ Z .<br />
Das um x ss linearisierte <strong>System</strong> lautet ˙ ξ = Aξ mit der Jacobi-Matrix<br />
A =<br />
<br />
∂f1<br />
∂x1<br />
∂f2<br />
∂x1<br />
∂f1<br />
∂x2<br />
∂f2<br />
∂x2<br />
<br />
<br />
<br />
(xss 1 ,xss<br />
=<br />
2 )<br />
<br />
0 1<br />
−β cos xss 1 −α<br />
<br />
.
Praktikumsanleitung VA 16 4<br />
Wegen<br />
gilt für x ss1<br />
Wegen<br />
gilt für x ss2<br />
<br />
cos arcsin γ<br />
β<br />
<br />
A1 =<br />
<br />
<br />
+ 2kπ = 1 −<br />
0 1<br />
− β 2 − γ 2 −α<br />
<br />
cos arcsin γ<br />
<br />
<br />
+ (2k + 1)π = − 1 −<br />
β<br />
<br />
A2 =<br />
0 1<br />
β 2 − γ 2 −α<br />
Aus den Nullstellen des charakteristischen Polynoms<br />
folgen die Eigenwerte von A1<br />
bzw. aus den Nullstellen von<br />
die Eigenwerte von A2<br />
2 γ<br />
; k ∈ Z<br />
β<br />
<br />
.<br />
2 γ<br />
; k ∈ Z<br />
β<br />
<br />
.<br />
det(sI − A1) = s 2 + αs + β 2 − γ 2 = 0<br />
s1/2 = − α<br />
2 ±<br />
α 2<br />
4 − β 2 − γ 2 ,<br />
det(sI − A2) = s 2 + αs − β 2 − γ 2 = 0<br />
s1/2 = − α<br />
2 ±<br />
<br />
α2 4 + β2 − γ2 .<br />
Für den Charakter der GG-Punkte gilt<br />
- k gerade: Re s1/2 < 0, <strong>als</strong>o stabiler Knoten- oder Strudelpunkt,<br />
- k ungerade: s1 < 0 < s2, <strong>als</strong>o Sattelpunkt . Bild 1 zeigt den nichtlinearen Fluß für einen<br />
Ausschnitt der Zustandsebene (Simulation mit MATLAB). Die Strudel- bzw. Sattelpunkte<br />
sind um den Betrag ∆ = arcsin U gegenüber den GG-Punkten für z = 0 (s. Bild 2)<br />
5 V<br />
verschoben.<br />
b) Es soll gelten: γ<br />
β<br />
= 1, d. h. U = 5 V<br />
Die GG-Punkte aus a) verschmelzen miteinander (Strudelpunkt mit Sattelpunkt). Bild 4<br />
zeigt den nichtlinearen Fluß für einen Ausschnitt aus der Zustandsebene.
frag replacements<br />
frag replacements<br />
Praktikumsanleitung VA 16 5<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
3000<br />
2000<br />
1000<br />
0<br />
−1000<br />
−2000<br />
−3000<br />
3000<br />
2000<br />
1000<br />
−1000<br />
−2000<br />
−3000<br />
−3 −2 −1 0 1 2 3<br />
x1 = ϕe<br />
π<br />
<br />
<br />
Bild 3: Trajektorienverläufe für z(t) = 0,<br />
0<br />
γ<br />
β<br />
<br />
<br />
= 0.5, d. h. U = 2.5 V<br />
−3 −2 −1 0 1 2 3<br />
x1 = ϕe<br />
π<br />
<br />
<br />
Bild 4: Trajektorienverläufe für z(t) = 0, = 1, d. h. U = 5 V<br />
γ<br />
β
Praktikumsanleitung VA 16 6<br />
Genau eine Trajektorie führt in den GG-Punkt (s. Bild 5).<br />
PSfrag replacements<br />
PSfrag replacements<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
200<br />
150<br />
100<br />
50<br />
0<br />
−50<br />
−100<br />
−150<br />
−200<br />
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7<br />
x1 = ϕe<br />
π<br />
Bild 5: Ausschnitt aus Bild 4 mit<br />
<br />
<br />
γ<br />
β<br />
<br />
<br />
= 1, d. h. U = 5 V<br />
Zur Veranschaulichung des Übergangs ist weiterhin in den Bildern 6 bzw. 7 der nichtlineare<br />
<br />
γ<br />
<br />
<br />
<br />
<br />
= 0.99, d. h. U = 4.97 V bzw. γ<br />
<br />
<br />
= 1, d. h. U = 5 V dargestellt.<br />
Fluß um x1 = π<br />
2 für<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
−200<br />
−400<br />
−600<br />
−800<br />
−1000<br />
β<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
x1 = ϕe<br />
π<br />
<br />
γ<br />
<br />
<br />
β = 0.99, d. h. U = 4.97 V<br />
Bild 6: Trajektorienverläufe für z(t) = 0,<br />
c) Es soll gelten: γ<br />
β<br />
> 1, d. h. U > 5 V<br />
Das Gleichungssystem (2) hat keine endlichen Lösungen für ˙x1 = 0 , ˙x2 = 0 und folglich<br />
auch keine GG-Punkte in einem endlichen Ausschnitt der Zustandsebene. Bild 8 zeigt den<br />
nichtlinearen Fluß für γ<br />
β<br />
= 1.5, d. h. U = 7.5 V<br />
β
PSfrag replacements<br />
g replacements<br />
Praktikumsanleitung VA 16 7<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
3000<br />
2000<br />
1000<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
0<br />
−1000<br />
−2000<br />
−3000<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
−200<br />
−400<br />
−600<br />
−800<br />
−1000<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
x1 = ϕe<br />
π<br />
<br />
<br />
Bild 7: Trajektorienverläufe für z(t) = 0,<br />
γ<br />
β<br />
<br />
<br />
= 1, d. h. U = 5 V<br />
−3 −2 −1 0 1 2 3<br />
x1 = ϕe<br />
π<br />
<br />
<br />
Bild 8: Trajektorienverläufe für z(t) = 0, = 1.5, d. h. U = 7.5 V<br />
γ<br />
β
Praktikumsanleitung VA 16 8<br />
Aufschlußreich ist hier die Diskussion der Isoklinen. Für die Isokline mit dem Anstieg c<br />
kann man notieren<br />
c = ˙x2<br />
˙x1<br />
= d x2<br />
d x1<br />
= −αx2 − β sin x1 + γ<br />
x2<br />
x2 = γ β<br />
−<br />
α + c α + c sin x1 .<br />
Für fest gewählte Werte von c stellt (6) eine verschobene Sinusfunktion dar. <strong>Der</strong> Graph<br />
der Funktion (6) liegt vollständig in der oberen Halbebene (c > 0).<br />
1.2 Experimentelle Untersuchung der Trajektorienverläufe<br />
Mit dem PLL nach Bild 1 kann man zwei Arten von Experimenten durchführen:<br />
a) sprungförmige Änderung der Phase ∆ϕr von r(t) zum Zeitpunkt t = t0<br />
bei U = const. < 5 V mit z(t) = ωr − ωy0<br />
+ ˙ωr =<br />
T<br />
S<br />
U = const. .<br />
T<br />
<strong>Der</strong> Startpunkt der dazugehörigen Trajektorie liegt bei<br />
x2 = ˙ϕe = 0 und x1 = ϕe = x ss<br />
1 + ∆ϕr .<br />
Dieses Experiment ist mit der zur Verfügung stehendem Gerätetechnik nicht möglich.<br />
b) sprungförmige Änderung der Frequenz von r(t) durch einen Spannungssprung<br />
∆U(t) = U0 · 1(t − t0) .<br />
Wir betrachten den Fall t0 = 0 ; U(−0) = 0 , U(+0) = U0 .<br />
Damit gilt<br />
z(t) = S<br />
T U0 · 1(t) + S · U0 · δ(t) .<br />
Startwert für x1:<br />
Die Phase von r(t) springt nicht, deshalb gilt x1(+0) = x1(−0) = ϕe(0) = 0, da der<br />
GG-Punkt xss 1 für z = 0, (d. h. U = 0 V) bei 2kπ, k ∈ Z liegt.<br />
Startwert für x2:<br />
Die δ-Funktion für ˙ωr bewirkt einen Startwert x2(+0) = ˙ϕe(+0) > 0 . Zur Berechnung<br />
des Startwertes x2(+0) der Trajektorie wird die Dgl. vgl. (2) <br />
˙x2 = −αx2 − β sin x1 + z<br />
in den Grenzen von t = −0 bis t = +0 integriert. Da x2, x1, α und β endlich sind,<br />
erhält man wegen x2(−0) = 0 und<br />
+0<br />
+0<br />
x2(+0) − x2(−0) = ˙x2(τ)dτ = z(τ)dτ = S · U0<br />
<strong>als</strong> Startwert<br />
−0<br />
−0<br />
x2(+0) = S · U0 .<br />
<strong>Der</strong> Startwert der Trajektorie ist <strong>als</strong>o x(t = +0) = x1(+0); x2(+0) = <br />
0; S · U0 .<br />
Bild 9 zeigt einen Ausschnitt der Zustandsebene mit den Trajektorien (fett gezeichnet)<br />
für einen Phasensprung von ∆ϕr = − π bei U(t) = 3 V sowie einen Frequenzsprung ∆ωr<br />
4<br />
mit U0 = 3 V .<br />
(6)
PSfrag replacements<br />
Praktikumsanleitung VA 16 9<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
1500<br />
1000<br />
500<br />
0<br />
−500<br />
−1000<br />
−1500<br />
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9<br />
x1 = ϕe<br />
π<br />
Bild 9: Trajektorien für Phasensprung ∆ϕr bei U(t) = 3 V und Frequenzsprung ∆ωr mit<br />
U0 = 3 V<br />
PSfrag replacements<br />
Wenn der Frequenzsprung ∆ωr zu groß wird, rastet der PLL aus. Bild 10 zeigt zwei<br />
Trajektorienverläufe im Grenzbereich U0 ≈ 3.12 V.<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
1500<br />
1000<br />
500<br />
0<br />
−500<br />
−1000<br />
−1500<br />
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9<br />
x1 = ϕe<br />
π<br />
Bild 10: Trajektorien für Frequenzsprünge ∆ωr mit U0 = 3.1 V (bleibt eingerastet) und<br />
U0 = 3.15 V (rastet aus)
Sfrag replacements<br />
Praktikumsanleitung VA 16 10<br />
Bei der Ableitung der Gleichungen (1) und (2) wurde davon ausgegangen, daß der Regler<br />
LF die hohen Frequenzen ωH = ωr + ωy vollständig unterdrückt. Tatsächlich bleibt eine<br />
Restwelligkeit erhalten, so daß die am <strong>Versuch</strong>sstand zu messenden Trajektorienverläufe<br />
mit einer „Wellenbewegung“ überlagert sind (s. Bild 11, Simulation mit MATLAB).<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
1500<br />
1000<br />
500<br />
0<br />
−500<br />
−1000<br />
−1500<br />
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9<br />
x1 = ϕe<br />
π<br />
Bild 11: Trajektorie des realen <strong>System</strong>s (fett) für Frequenzsprung ∆ωr mit U0 = 3 V<br />
Literatur<br />
[1] Praktikumsanleitung VA 7: <strong>Phasenregelkreis</strong> (phase locked loop: PLL). TU Dresden,<br />
Institut für Regelungs- und Steuerungstheorie 2007.<br />
[2] Reinschke, K.: Skript zur Vorlesung „ NichtlineareRegelungssysteme “. TU Dresden,<br />
Institut für Regelungs- und Steuerungstheorie 2002.<br />
2 <strong>Versuch</strong>saufbau<br />
Für die Durchführung des Praktikumsversuches steht ein gerätetechnischer Aufbau nach<br />
Bild 12 zur Verfügung, der auf einem Modellregelkreis MRK 931 realisiert wird. Die einzelnen<br />
Übertragungsglieder bedeuten:<br />
- VCO 1 Generator für U(t)<br />
- VCO 2 VCO zur Erzeugung von r(t)<br />
- M Analogmultiplizierer zur Erzeugung von E(t)<br />
- LF Regler im PLL, GLF (s) = KLF<br />
1+sT<br />
- VCO 3 VCO zur Erzeugung von y(t)<br />
- PD digitaler Phasendetektor (Prinzip s. [1]) erweiterter Messbereich |emax| = 4 · 2π<br />
- TP Tiefpass höherer Ordnung<br />
- GD(s) Differenzierglied GD(s) = K sTV<br />
1+sTV<br />
Zur Unterdrückung der höherfrequenten Signalanteile (s. z. B. Bild 11) stehen weitere<br />
Tiefpässe TP zur Verfügung.
g replacements<br />
Praktikumsanleitung VA 16 11<br />
VCO 1<br />
U(t) VCO 2 r(t)<br />
M<br />
y(t)<br />
3 <strong>Versuch</strong>svorbereitung<br />
E(t)<br />
LF<br />
PD TP<br />
VCO 3<br />
Bild 12: Experimentieraufbau <strong>Phasenregelkreis</strong><br />
V (t)<br />
e(t) GD(s)<br />
3.1 Veranschaulichen Sie sich die Wirkungsweise des Experimentieraufbaus <strong>Phasenregelkreis</strong>.<br />
Weshalb wird der Tiefpass TP unbedingt benötigt?<br />
3.2 Bild 13 zeigt die Trajektorie bei einem Frequenzsprung ωr für U(t) = 2 V·1(t) . Wenn<br />
U(t) von -2 V auf +2 V springen würde, d. h. U(t) = −2 V+4 V·1(t) gilt, bliebe dann<br />
der PLL im eingerasteten Zustand? Zeichnen Sie qualitativ die zugehörige Trajektorie<br />
in Bild 13 ein.<br />
x2 = ˙ϕe<br />
2π [Hz]<br />
3000<br />
2000<br />
1000<br />
0<br />
−1000<br />
−2000<br />
−3000<br />
−0.2 0 0.2 0.4 0.6 0.8 1<br />
x1 = ϕe<br />
π<br />
Bild 13: Trajektorien für U0 = 2 V<br />
˙e(t)
Praktikumsanleitung VA 16 12<br />
4 <strong>Versuch</strong>sdurchführung<br />
Realisieren Sie mit den zur Verfügung stehenden Baugruppen einen geschlossenen <strong>Phasenregelkreis</strong><br />
nach Bild 12 (KLF = 1, T = 0, 5 ms). Da die VCO 2 und VCO 3 nicht exakt<br />
gleiche Eigenschaften haben, ist es sinnvoll zum Ausgleich auf das Signal U(t) eine kleine<br />
Gleichspannung (einige mV) zu addieren ) ∗ .<br />
Stellen Sie die Signale U(t) und V (t) sowie e(t) und ˙e(t) auf dem Oszilloskop sowie mit<br />
dem Rechner dar. Vergleichen Sie die Messergebnisse bei Verwendung von e(t) oder e(t)<br />
e(t) berechnet aus U(t) und V (t) . Betrachten Sie die Messkurven sowohl im x,t-Diagramm<br />
<strong>als</strong> auch im xy-Diagramm.<br />
4.1 Variieren Sie das Signal r(t) in der Frequenz (VCO 1 verwenden, U(t) <strong>als</strong> Rechteckund<br />
Dreieckschwingung). Betrachten Sie U(t) und V (t). Symmetrieren Sie das Ausrastverhalten<br />
siehe ) ∗ . Variieren Sie dabei die Frequenz von VCO 1.<br />
4.2 Stellen Sie U(t) <strong>als</strong> rechteckförmige Signalform ein (d. h. für das Experiment gilt<br />
z(t) = const.). Betrachten Sie U(t) und V (t) sowie e(t) und ˙e(t).<br />
4.3 Stellen Sie U(t) <strong>als</strong> dreieckförmige Signalform ein. Variieren Sie die Amplitude von<br />
U(t) so, dass der Haltebereich nicht verlassen wird bzw. sich ein periodisches Ein- und<br />
Ausrasten der PLL ergibt. Diskutieren Sie die Oszillogramme wie bei Aufgabe 4.2.<br />
5 <strong>Versuch</strong>sauswertung<br />
Diskutieren Sie die Oszillogramme vergleichend mit den Bildern 2 bis 11.<br />
Kennzeichnen Sie in den Messungen nach 4.2 und 4.3 gleiche Zeitabschnitte in den Diagrammen<br />
von U(t) bzw. V (t) (x,t-Diagramm) und ˙e(t) = f e(t) (xy-Diagramm).<br />
PC-Programm zur Messwerterfassung:<br />
Das Programm ist in der Programmiersprache LabVIEW geschrieben und wie das Programm<br />
für V 7 aufgebaut. Es gestattet die Messung von sechs Signalen, entweder<br />
das Eingangssignal des VCO 2 U(t) und das Eingangssignal des VCO 3 V (t) bzw.<br />
das Ausgangssignal des VCO 2 r(t) und das Ausgangssignal des VCO 3 y(t) oder<br />
die gemessene Phasendifferenz e(t) und deren Ableitung ˙e(t)<br />
mit einer Abtastrate von 100 kHz.<br />
Zusätzlich kann die Phasendifferenz e(t) und deren Ableitung ˙e(t) aus den Signalen U(t)<br />
und V (t) berechnet werden. Es gilt für r(t) mit ϕ = 2π fdt = 2π f0 + S · U(t) dt<br />
( f0 → Mittenfrequenz für U = 0)<br />
<br />
U(t) <br />
e(t) = 2πS − V (t) dt<br />
Diese Signale lassen sich <strong>als</strong> Zeitfunktionen (x,t-Diagramm) oder im xy-Diagramm<br />
V = f(U) bzw. y = f(r) oder ˙e = f(e) bzw, ˙ e = f(e) darstellen.<br />
Die Auswahl der Signale erfolgt über den Software-Schalter „Messregime“.<br />
Die gemessenen Signale können in zwei Diagrammen gespeichert und zusammen mit einem<br />
Kommentar ausgedruckt werden.<br />
August 2007 (Dr. Badelt)