Koordinatensysteme, Transformation und deren Effekte
Koordinatensysteme, Transformation und deren Effekte
Koordinatensysteme, Transformation und deren Effekte

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
<strong>Koordinatensysteme</strong>, <strong>Transformation</strong> <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong><br />
0. Inhalt<br />
1. <strong>Koordinatensysteme</strong><br />
2. affine Koordinaten<br />
• kovariant <strong>und</strong> kontravariant<br />
• affine <strong>und</strong> physikalischen Komponenten<br />
• Rechenregeln<br />
• Bezugssystemwechsel (<strong>Transformation</strong>)<br />
3. Das Kartesische Koordinatensystem<br />
4. <strong>Transformation</strong>sformeln<br />
• Verschiebung<br />
• Bezugssystemwechsel<br />
• Spiegelung<br />
5. <strong>Effekte</strong><br />
• Corioleskraft<br />
• Überschall<br />
• (spezielle) Lorentz- <strong>Transformation</strong><br />
6. Literatur<br />
1. <strong>Koordinatensysteme</strong><br />
Was ist ein Vektor? Was ist ein Koordinatensystem?<br />
Laut Def. ist ein Vektor ein Element eines Vektorraumes, so lustig <strong>und</strong> nichtssagend wie es auch klingt. Bildlich<br />
gesprochen ist es der richtungs- <strong>und</strong> entfernungsabhängige „Verbindungspfeil“ zwischen zwei Punkten.<br />
Kennzeichen eines Vektors ist es, dass seine physischen Merkmale (Richtung <strong>und</strong> Länge) unabhängig von der<br />
Wahl des Koordinatensystems sind. Dieses Prinzip bezeichnet man als Invarianz eines Vektors.<br />
Das Koordinatensystem ist ein mathematischer Versuch, jeden Punkt im Raum sinnvoll zu beschreiben. (Das<br />
Wort Versuch ist hier deshalb so gewählt, weil sich nicht jedes KS für die Beschreibung jedes Problems<br />
anbietet.) Es ist also als eine Abbildung von n- Tupeln (Koordinaten) auf die in der Ebene (n=2) oder im Raum<br />
(n=3 oder 4) befindlichen Punkte zu verstehen.<br />
Geradliniges KS<br />
Affines Koordinatensystem<br />
Jedes Tupel (für die Ebene) oder Tripel (für den Raum) aus linear voneinander unabhängigen Vektoren g 1 , g 2 , g 3<br />
kann als Koordinatensystem dienen. Dabei sollen diese Vektoren als die Gr<strong>und</strong>vektoren, ausgehend vom<br />
Koordinatenursprung, aufgefasst werden.<br />
Kartesisches KS<br />
Orthonormiert man die Basen eines Koordinatensystems <strong>und</strong> ordnet sie rechtsdrehend, so erhält man das in den<br />
Naturwissenschaften standardmäßig genutzte kartesische KS. Es gilt:<br />
span e<br />
e × e<br />
x<br />
x<br />
x<br />
( , e , e )<br />
y<br />
e ∗ e<br />
e<br />
y<br />
x<br />
= e<br />
= e<br />
= 0<br />
y<br />
y<br />
z<br />
= e<br />
z<br />
z<br />
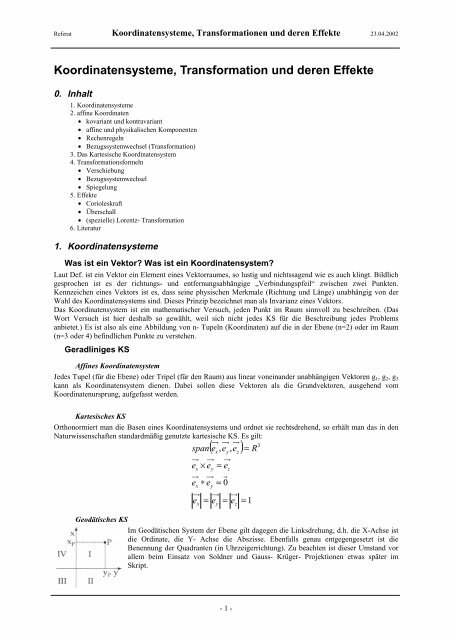
Geodätisches KS<br />
Im Geodätischen System der Ebene gilt dagegen die Linksdrehung, d.h. die X-Achse ist<br />
die Ordinate, die Y- Achse die Abszisse. Ebenfalls genau entgegengesetzt ist die<br />
Benennung der Quadranten (in Uhrzeigerrichtung). Zu beachten ist dieser Umstand vor<br />
allem beim Einsatz von Soldner <strong>und</strong> Gauss- Krüger- Projektionen etwas später im<br />
Skript.<br />
= R<br />
= 1<br />
3<br />
- 1 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Polare <strong>und</strong> Sphärische-KS<br />
Polares KS <strong>und</strong> Geodätisches PolarKS<br />
Polare Koordinaten bestehen aus einem Winkel <strong>und</strong> der Entfernung zum Koordinatenursprung. Im Gegensatz<br />
zum gewöhnlichen PolarKS ist das Geodätische PolarKS linkshändig.<br />
Polabstands SKS <strong>und</strong> Geographisches SKS<br />
Da oft damit schon gerechnet <strong>und</strong> gearbeitet wurde, seinen hier nur einige Skizzen zur Verdeutlichung<br />
eingeschoben:<br />
Projizierte KS<br />
Eben- projizierte KS<br />
Söldner KS<br />
Nun stellt sich die Frage, wie man eine Kugeloberfläche wie die der Erde<br />
in möglichst handliche (faltbar oder nicht) Form bringt, da ein Globus<br />
sich nun nicht gerade durch Genauigkeit <strong>und</strong> einfache Handhabung<br />
auszeichnet. Dazu muss man die gekrümmte Oberfläche auf eine Fläche<br />
projizieren.<br />
Bei dem Soldnerverfahren geht man von einem gut bestimmten<br />
Bezugspunkt (Zentralpunkt) aus <strong>und</strong> legt die Abszisse (geodätisches<br />
System: x- Achse!) auf einen Meridian. Die der Wert der Ordinate y <strong>und</strong><br />
der der Abszisse x eines Punktes ist dann durch das sphärische Lot auf<br />
den Zentralmeridian bzw. die Zentralbreite. Es tritt in Nord-Süd- Richtung<br />
ein Streckungsfaktor<br />
a<br />
∆x<br />
=<br />
∆x<br />
= 1<br />
+<br />
∆ x real<br />
2<br />
real<br />
2<br />
y<br />
2R<br />
Gauß- Krüger KS<br />
auf.<br />
Während Soldner die Breite korrekt darstellt, versucht das Gauss- Krüger-<br />
Verfahren winkelgetreu (<strong>und</strong> annähernd auch streckentreu) abzubilden. Dazu<br />
wird die Erdoberfläche von Nord nach Süd in lauter 3°20’ breite<br />
„Apfelsinenschalenstreifchen“ zerlegt, geplättet <strong>und</strong> wieder an den<br />
Überlappungsgebieten zusammen geführt (falls notwendig). Zweckmäßiger<br />
Weise richtet man sich Hauptmeridiane ein (0°, 3°, 6°, usw.), von denen man<br />
ausgeht. Den Koordinatenursprung legt man in den Schnittpunkt<br />
Hauptmeridian- Äquator. Damit kann man im Gegensatz zu Soldner mit „nur“<br />
120 Messungen die gesamte Erde dartellen <strong>und</strong> benötigt nicht für jeden<br />
Breitenkreis einen neuen Zentralpunkt.<br />
Die Streckungen, die entlang der x- <strong>und</strong> y- Achse entstehen berechnen sich zu:<br />
a<br />
∆x<br />
a<br />
∆y<br />
∆x<br />
=<br />
∆x<br />
real<br />
3<br />
real<br />
2<br />
y<br />
=<br />
6R<br />
= 1+<br />
2<br />
real<br />
2<br />
y<br />
2R<br />
- 2 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Mercator- Projektion<br />
Das Mercatorsystem „rollt“ die Erde auf die Oberfläche eines Zylinders ab. Da im hohen<br />
Norden <strong>und</strong> im tiefen Süden so <strong>und</strong> so recht wenig Menschen leben, macht es scheinbar nicht<br />
so viel aus, dass an den Polen die Breitenzerrung im vollen Umfang zuschlägt...<br />
Kugelförmig- projizierte KS<br />
In dieser Sparte seien exemplarisch nur die beiden wichtigsten astronomischen <strong>Koordinatensysteme</strong>, Horizont<strong>und</strong><br />
Äquatorsystem, erwähnt.<br />
Zylinder KS<br />
Ja, na ja. Das ist halt so’n Zwischending aus Polarkoordinatensystem <strong>und</strong> einer kartesischen<br />
Höhe. Da es schon öfters Anwendung fand (s. Mathematik für Physiker I) ist dem ebenso<br />
nicht so viel Platz zu opfern.<br />
Krummliniges KS<br />
Ganz interessant (aber völlig Rahmen- sprengend) sind die krummlinigen Koordinaten. Spezialfälle davon sind<br />
bereits bekannt, nämlich in Form der Sphärischen Koordinaten.<br />
Krummlinige Koordinaten bilden sich aus Kurvenscharen, welche für jede mögliche Parameterverteilung genau<br />
einen Schnittpunkt haben (z.B. eine Kugelfläche <strong>und</strong> ein Radius- Strahl). Damit kann man dann jede Fläche <strong>und</strong><br />
jeden Weg im Raum auf einfache Art <strong>und</strong> Weise nachbilden. Problem ist nur: wie kann man diese Koordinaten<br />
ins Kartesische System transformieren. Also sind diese für spezielle Lösungen besonders gut, für allgemeine<br />
Anwendungen aber recht problematisch zu handhaben.<br />
2. affine Koordinaten<br />
Kovariant <strong>und</strong> kontravariante Vektoren<br />
Möchte man die Welt der Koordinaten besser verstehen, so muss man mit der Ursuppe beginnen, aus der es<br />
kroch. Das heißt, wir schauen uns als erstes den Prototypen aller geradlinigen raumbeschreibenden Systeme an,<br />
nämlich das affine Koordinatensystem. Bei diesem sind drei (oder zwei) linear unabhängige Vektoren als<br />
Messgr<strong>und</strong>lage gegeben- <strong>und</strong> sonst nichts. (Dass es sich dabei nicht um eine Gemeinheit der Mathematiker<br />
handelt, soll uns das letzte Beispiel zeigen.)<br />
Zunächst aber fußen unsere Überlegungen in dem Gleichungssystem mit drei Skalarprodukten, wobei der Vektor<br />
x die eigentliche Unbekannte ist.<br />
x ∗ a = α ⎫<br />
⎪ α<br />
x ∗b<br />
= β ⎬ ⇒ x =<br />
⎪<br />
x ∗ c = γ ⎪⎭<br />
~ ~ ~<br />
( b × c) + β ( c × a) + γ ( a × b) abc<br />
- 3 -<br />
= α ⋅ a+<br />
β ⋅ b+<br />
γ ⋅ c<br />
Die Lösung für x ergibt sich aus der Eigenschaft des Skalarproduktes, dass sich senkrechte Komponenten<br />
wegheben. Man führt ferner (vorerst) für Rechenvorteile <strong>und</strong> Schreibverkürzung die Vektoren<br />
~<br />
~<br />
b×<br />
c c×<br />
a a × b<br />
a = , b = , c =<br />
abc abc abc ein.<br />
~
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Setzt man nämlich zur Probe die Ausgangsgleichungen (was ja lediglich Projektionen von x auf a, b <strong>und</strong> c sind<br />
in die Lösung ein, so erhält man x=x, also ist diese tatsächlich eine Lösung zu unseren Ausgangsproblem<br />
Nun belässt man es aber nicht dabei, sondern nennt die Vektoren auf der linken Seite der Gleichung die<br />
kovarianten, die geschlängelten auf der rechten die dazu kontravarianten Vektoren.<br />
n<br />
a = : an;<br />
a = : a<br />
Wie man sieht, sind in diesem Skript die kovarianten unten, die kontravarianten Vektoren oben indexiert.<br />
<strong>Transformation</strong> zwischen ko- <strong>und</strong> kontravarianten Vektoren<br />
Jetzt überlegen wir uns, wie die ko- <strong>und</strong> kontravarianten Vektoren zusammenhängen. Da sowohl die ko- als auch<br />
die kontravarianten Vektoren linear unterschiedlich sind, kann man die einen als Linearkombination der an<strong>deren</strong><br />
darstellen. Also schauen wir uns an, wie aus der kovarianten Vektorschar sich die kontravarianten Vektoren<br />
entwickeln lassen:<br />
a<br />
a<br />
a<br />
1<br />
2<br />
3<br />
= g<br />
= g<br />
= g<br />
11<br />
21<br />
31<br />
⋅ a + g<br />
1<br />
1<br />
1<br />
~<br />
12<br />
⋅a<br />
+ g<br />
⋅ a + g<br />
22<br />
32<br />
⋅a<br />
2<br />
⋅a<br />
⋅a<br />
2<br />
2<br />
+ g<br />
+ g<br />
13<br />
+ g<br />
Wir multiplizieren, um die Gleichungen nach g nm aufzulösen, mit a 1 , a 2 bzw. a 3 durch.<br />
1 1<br />
a ∗ a =<br />
g<br />
11<br />
1 1<br />
= a ∗ a<br />
11 12<br />
13<br />
( g ⋅ a + g ⋅ a + g ⋅ a )<br />
1<br />
2<br />
3<br />
∗ a<br />
23<br />
33<br />
1<br />
⋅a<br />
3<br />
⋅ a<br />
⋅a<br />
3<br />
3<br />
= g<br />
11<br />
1<br />
⋅ a ∗ a<br />
Noch mal zur Erinnerung: Skalarprodukte zweier senkrechter Vektoren sind Null. Deshalb vereinfacht sich<br />
dieses Gleichungssystem auf eben diese einfache Form:<br />
a<br />
1<br />
a2<br />
× a<br />
=<br />
a a a<br />
Da das Skalarprodukt kommutativ ist, gilt ja:<br />
1<br />
2<br />
3<br />
2<br />
⎧<br />
⎪ 1<br />
a ∗ a<br />
⎪<br />
1<br />
⇒ ⎨a<br />
∗ a<br />
⎪<br />
⎪ 1<br />
a ∗ a<br />
⎪<br />
⎩<br />
2<br />
3<br />
1<br />
=<br />
0, da<br />
= 0 dito<br />
a<br />
2<br />
× a3<br />
=<br />
a a a<br />
1<br />
2<br />
1<br />
a senkrecht auf a<br />
3<br />
∗ a<br />
nm n m m n<br />
g = a ∗ a = a ∗ a =<br />
1<br />
1<br />
2<br />
1<br />
a1<br />
a2a<br />
=<br />
a a a<br />
mn<br />
g<br />
Das heißt, das obige Gleichungssystem als Matrix geschrieben, ergibt eine symmetrische Matrix. Wenn man das<br />
ganze Prozedere ebenso für die Gegenrichtung anrichtet, erhält man diese Erkenntnisse ebenso:<br />
a<br />
1<br />
2<br />
3<br />
1<br />
= g11<br />
⋅ a + g12<br />
⋅a<br />
+ g13<br />
⋅ a<br />
<br />
3<br />
3<br />
= 1<br />
= g<br />
2<br />
11<br />
g = a ∗ a = a ∗ a = g<br />
nm<br />
n<br />
m<br />
Zu guter Letzt schauen wir uns an, was geschieht wenn man beide <strong>Transformation</strong>en hintereinander ausführt.<br />
Unsere Vermutung ist natürlich, dass diese Abbildung denn die Identität sein muss. Das aber ersteinmal zu<br />
zeigen, setzen die Gleichungen ineinander ein.<br />
a = g<br />
1<br />
= g<br />
!<br />
1<br />
= a<br />
<br />
11<br />
11<br />
= a ⋅<br />
1<br />
1<br />
⋅ a + g<br />
g<br />
11<br />
m<br />
11 12 13<br />
12 22 23<br />
13 23 33<br />
( g g + g g + g g ) + a ⋅ ( g g + g g + g g ) + a ⋅ ( g g + g g + g g )<br />
11<br />
1<br />
2<br />
12<br />
⋅ a<br />
⋅ a + g<br />
11<br />
2<br />
12<br />
3<br />
12<br />
2<br />
13<br />
13<br />
3<br />
11<br />
13<br />
3<br />
⋅1+<br />
a ⋅ 0 + a ⋅ 0 wegen lin. Unabhängigkeit von a , a , a<br />
Dabei zeigt sich, dass:<br />
g<br />
+ g<br />
a<br />
⋅ a<br />
+ g<br />
g<br />
a + g<br />
2<br />
12<br />
g<br />
11<br />
21<br />
a + g<br />
1<br />
12<br />
12<br />
g<br />
22<br />
n<br />
a<br />
2<br />
13<br />
1<br />
mn<br />
+ g<br />
2<br />
12<br />
g<br />
3<br />
23<br />
a + g<br />
3<br />
3<br />
13<br />
11<br />
g<br />
31<br />
a + g<br />
1<br />
12<br />
13<br />
g<br />
32<br />
a<br />
2<br />
13<br />
+ g<br />
13<br />
g<br />
33<br />
a<br />
3<br />
- 4 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
∑<br />
l<br />
g<br />
kl<br />
g<br />
lm<br />
= δ<br />
Also ist die Abbildungsmatrix tatsächlich die Einheitsmatrix:<br />
f<br />
a<br />
x<br />
x $ a<br />
f<br />
a<br />
x<br />
<br />
k<br />
m<br />
a<br />
x<br />
⎧1<br />
⇔ k = m<br />
= ⎨<br />
⎩0<br />
⇔ k ≠ m<br />
⎛1<br />
⎜<br />
= ⎜0<br />
⎜<br />
⎝0<br />
Weiterhin sei noch darauf hingewiesen, dass die Gegenabbildung B durch die Inverse der Abbildungsmatrix A<br />
beschrieben wird. Also gilt für <strong>deren</strong> Einträge<br />
B = b<br />
ij<br />
= A<br />
−1<br />
=<br />
i<br />
( −1)<br />
Darstellung eines Vektors im affinen Koordinatensystem<br />
Damit sind wir nun eigentlich an dem Punkt, an dem wir in die Darstellung mittels affiner <strong>Koordinatensysteme</strong><br />
einsteigen können. Während wir bis jetzt lediglich affine Koordinatenscharen bzgl. Der Standartbasen des R 3<br />
betrachtet haben, gehen wir jetzt dazu über, Vektoren auf der Gr<strong>und</strong>lage dieser zu beschreiben. Es sei<br />
A<br />
X<br />
=<br />
K<br />
=<br />
( x,<br />
y,<br />
z)<br />
Vektor im R<br />
3<br />
( a1,<br />
a2,<br />
a3<br />
) ein kovariantes Koordinatensystem unter den Vektoren a1,a2,a<br />
3<br />
Damit können wir einen Vektor X als Linearkombination der kovarianten Basen a 1 , a 2 <strong>und</strong> a 3 darstellen.<br />
X = X<br />
1<br />
⋅ a + X<br />
1<br />
Dabei bezeichnet man die Koeffizienten X 1 , X 2 <strong>und</strong> X 3 als die kontravarianten Komponenten eines Vektors. Auch<br />
diese gilt es auszurechnen <strong>und</strong> dazu zaubern wir wieder mit dem alten Trick mit dem Skalarprodukt:<br />
X = X<br />
X ∗<br />
X<br />
1<br />
⇒ X<br />
1<br />
( a2<br />
× a3<br />
)<br />
a2<br />
× a3<br />
= X ∗<br />
a a a<br />
k<br />
=<br />
⋅a<br />
1<br />
+ X<br />
1<br />
= X<br />
2<br />
2<br />
3<br />
⋅ a<br />
1<br />
2<br />
1<br />
+ X<br />
⋅a<br />
a a<br />
2<br />
3<br />
= X ∗ a<br />
2<br />
⋅a<br />
2<br />
+ j<br />
0<br />
1<br />
0<br />
⋅<br />
+ X<br />
0⎞<br />
⎟<br />
0⎟<br />
1⎟<br />
⎠<br />
Aji<br />
A<br />
3<br />
⋅ a<br />
3<br />
( a2<br />
× a3<br />
)<br />
1 2 3<br />
( ) ⎜⎛<br />
1 2 3<br />
X , X , X = X ∗a<br />
, X ∗a<br />
, X ∗a<br />
⎟⎞<br />
⎠<br />
Äquivalent dazu rechnet man ebenso die kovarianten Komponenten des Vektors aus.<br />
Die physikalischen Komponenten eines Vektors<br />
Nun sagen die Komponenten nichts über das Verhalten des Vektors aus. Da aber Physiker gerne auch mal mit<br />
Beträgen rechnen (Geschwindigkeiten etc.) wäre es doch ganz praktisch, Vektoren so darzustellen, dass man<br />
ihnen ihre Länge ohne Weiteres entnehmen kann.<br />
Also knöpfen wir uns den Vektor X k einmal vor <strong>und</strong> untersuchen seine Komponenten.<br />
X k<br />
=<br />
⎝<br />
3<br />
1<br />
⋅ a<br />
3<br />
∗<br />
1 2 3<br />
( X ∗ a , X ∗ a , X ∗ a )<br />
Bis jetzt haben wir die Länge eines Basisvektors immer mit der Standartlänge 1 LE gleichgesetzt, nicht achtend<br />
dessen, ob dieser Basisvektor überhaupt diese Länge hat. Multiplizieren wir also die Komponenten des Vektors<br />
mit der Länge des Basisvektors, so arbeiten wir die Längenangaben mit in den Vektor mit ein <strong>und</strong> erhalten so:<br />
X<br />
∗1<br />
= X<br />
1<br />
⋅ a<br />
1<br />
= X<br />
1<br />
a ∗ a<br />
Na gut, das war jetzt erst einmal genug der Vektorentheorie, wie geht man mit solchen krummen Dingern denn<br />
eigentlich um? Dazu mehr im nächsten Kapitel.<br />
⋅<br />
1<br />
1<br />
= X<br />
1<br />
⋅<br />
g<br />
11<br />
- 5 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Rechenregeln: Addition, Skalarprodukt <strong>und</strong> Vektorprodukt im affinen VR<br />
Addition<br />
Wir zerlegen einmal die Vektoren X <strong>und</strong> Y in ihre Komponenten <strong>und</strong> schauen einmal was passiert, wenn wirunter<br />
der Voraussetzung, dass die Umrechnung in die Komponenten der Standartbasis bekannt ist- auf Bekanntes<br />
zurückführen:<br />
X + Y =<br />
=<br />
=<br />
=<br />
1 2 3 1 2 3<br />
( X , X , X ) + ( Y , Y , Y )<br />
( X ∗a1,<br />
X ∗a2,<br />
X ∗a3) + ( Y ∗ a1,<br />
Y ∗ a2,<br />
Y ∗a3)<br />
( X + Y ) ∗a1,<br />
( X + Y ) ∗a2,<br />
( X + Y ) ∗a3<br />
)<br />
1 1 2 2 3 3<br />
( X + Y , X + Y , X + Y )<br />
Damit ist also die Addition auf die Komponentenweise Addition zweier Vektoren mit Komponenten im selbem<br />
affinen System zurückgeführt. Wenden wir uns dem Skalarprodukt zweier Vektoren zu.<br />
Skalarprodukt<br />
Wieder machen wir das, was wir tun, wenn wir nicht weiter wissen: Wir zerlegen:<br />
U = X ∗Y<br />
=<br />
k l<br />
k<br />
l<br />
∑ X ak<br />
∗Y<br />
al<br />
= ∑ X ak<br />
∗Yl<br />
a =<br />
k,<br />
l<br />
k,<br />
l<br />
- 6 -<br />
<br />
(oder,oder,oder)<br />
Wir wissen ja noch von unseren vorherigen Überlegungen bezüglich der Beziehungen zwischen ko- <strong>und</strong><br />
kontravarianter Vektoren, dass (u.a.):<br />
k k<br />
δ<br />
l<br />
= a al<br />
Also gilt folglich, dass nur l=k als Summand zulässig ist:<br />
U =<br />
=<br />
∑<br />
l<br />
∑<br />
l<br />
l<br />
X Y<br />
l<br />
X Y<br />
l<br />
l<br />
a<br />
=<br />
l<br />
Also ist die Multiplikation zwischen einem ko- <strong>und</strong> einem kontravarianten Vektor besonders pflegeleicht.<br />
Vektorprodukt<br />
Bevor wir loslegen wäre es gang praktisch, nocheinmal schnell die Eigenschaften des Vektorprodukts<br />
aufzuführen:<br />
u = x × y ⇒ u ∗ x = 0 ∧ u ∗ y = 0<br />
Klaro. u steht auf x <strong>und</strong> y senkrecht.<br />
2<br />
=<br />
∑<br />
l<br />
∑<br />
k,<br />
l<br />
X Y<br />
l<br />
l<br />
X Y<br />
x×<br />
( y + z)<br />
= x×<br />
y + x×<br />
z<br />
( x + y) × z = x×<br />
z + y × z<br />
Es gilt natürlich auch weiterhin, dass man locker <strong>und</strong> fröhlich Summen aus- <strong>und</strong> einklammern kann.<br />
Vorfaktoren kann man ebenso herausziehen <strong>und</strong>...<br />
a x×<br />
by = abx×<br />
y<br />
im Beson<strong>deren</strong> x × x = 0<br />
...beim vertauschen der Vektoren ändert sich das Vorzeichen. Bis jetzt nichts neues.<br />
Schauen wir uns deshalb einmal des Kreuzprodukt zweier in Affinkorrdinaten beschriebener Vektoren an.<br />
U = X × Y<br />
=<br />
l<br />
l<br />
g<br />
ll<br />
x×<br />
y = − y × x<br />
1 2 3 1 2 3<br />
( X a1<br />
+ X a2<br />
+ X a3<br />
) × ( Y a1<br />
+ Y a2<br />
+ Y a3)<br />
Dabei aber ist ja (gemäß der Definition der ko- <strong>und</strong> kontravarianten Vektoren):<br />
m<br />
a × a = a<br />
k<br />
l<br />
zykl<br />
klm =<br />
{ 123}<br />
⋅ a a<br />
Was dies eingesetzt in die ausmultiplizierte Form ergibt, das erfahrt ihr auf der nächsten Seite.<br />
1<br />
2<br />
a<br />
3
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Nämlich ergibt sich...<br />
U = a a<br />
1<br />
= a a<br />
1<br />
2<br />
2<br />
⎜⎛<br />
1<br />
a3<br />
⋅ X Y<br />
⎝<br />
⎡ 1<br />
a3<br />
⋅ a<br />
⎢⎣<br />
2<br />
3 1<br />
a − X Y<br />
3<br />
2 2<br />
a − X Y<br />
1<br />
3 2<br />
a + X Y<br />
2 3 3 2 2 3 1 1 3 3 1 2 2 1<br />
( X Y − X Y ) + a ( X Y − X Y ) + a ( X Y − X Y ) ⎤<br />
⎥ ⎦<br />
3<br />
1 3<br />
a + X Y<br />
1<br />
2 3<br />
a − X Y<br />
...eine lange Zeile mit vielen Buchstaben, oder eine symbolische Determinante folgender Form:<br />
U = a a<br />
1<br />
2<br />
⎛ 1<br />
⎜ a<br />
⎜<br />
1<br />
a3<br />
⋅ X<br />
⎜<br />
1<br />
Y<br />
⎝<br />
<strong>Transformation</strong> in ein anderes (affines) Bezugssystem<br />
Jetzt heißt der Vortrag aber nicht „Rechnen mit seltsamen Vektoren“ sondern „<strong>Transformation</strong>“. Also versuchen<br />
wir nun, einen affinen Koordinatenraum in einen an<strong>deren</strong> zu überführen. Selbes Schema, gleicht Trick: Wir<br />
zerlegen einen Vektor in seine Komponenten, sowohl bzgl. Des einen, als auch des an<strong>deren</strong> Systems:<br />
1 2 3 1 2<br />
X = X a1<br />
+ X a2<br />
+ X a3<br />
= X a1<br />
+ X a2<br />
+<br />
Dabei können wir natürlich auch die Basen selbst als zu zerlegende Vektoren betrachten. Der entstehenden<br />
Linearkombination gehen wir mit dem Skalarprodukt an den Kragen.<br />
a = t a + t a<br />
1<br />
⇒ t<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
2<br />
1<br />
1<br />
= a ∗a<br />
Das analoge Lösen aller an<strong>deren</strong> 8 Gleichungen führt uns dann auch schon zur offiziellen<br />
Koeffizientengleichung.<br />
t<br />
k<br />
l<br />
l<br />
2<br />
+ t<br />
a<br />
X<br />
Y<br />
3<br />
1<br />
k<br />
= a ∗ a<br />
2<br />
2<br />
2<br />
a<br />
3<br />
a<br />
X<br />
Y<br />
∗a<br />
3<br />
3<br />
3<br />
1<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
X<br />
3<br />
2<br />
a<br />
a<br />
3<br />
1<br />
⎟ ⎠<br />
⎞<br />
Das kann man natürlich auch in die andere Abbildungsrichtung bis zum Exzess exerzieren...<br />
a = + +<br />
1 2 3<br />
1<br />
t1<br />
a1<br />
t1<br />
a2<br />
t1<br />
a3<br />
... <strong>und</strong> der Wissenszuwachs ist mächtig gewaltig: Die Hintereinanderausführung von Hin- <strong>und</strong><br />
Rücktransformation ergibt die Einheitsmatrix.<br />
∑<br />
l<br />
t<br />
l m<br />
k<br />
tl<br />
Also lässt sich der Vektor X folgendermaßen aus dem untengestrichenen System in das obengestrichene System<br />
überführen (Matrizenmultiplikation!):<br />
l<br />
X k<br />
= ∑tk<br />
X l<br />
l<br />
3. Kartesische Koordinaten<br />
Gehen wir noch mal einen Schritt zurück <strong>und</strong> nehmen unser Lieblingskoordinatensystem: die Standart ONB des<br />
R 3 <strong>und</strong> schauen ein wenig, was sich im Hinblick auf die eben erarbeiteten Gr<strong>und</strong>lagen ergibt.<br />
= δ<br />
Kartesisches KS (KKS) als Sonderfall des affinen KS<br />
Als erstes fällt uns ein, dass es da ja besondere Merkmale gab, nämlich:<br />
span e<br />
3<br />
(<br />
x,<br />
ey,<br />
ez<br />
) = R , ex<br />
× ey<br />
= ez,<br />
ex<br />
∗ey<br />
= 0, ex<br />
= ey<br />
= ez<br />
= 1<br />
Weiterhin schauen wir uns die kontravarianten Basisvektoren an <strong>und</strong> stellen fast, dass sie mit den kovarianten<br />
übereinstimmen!<br />
1<br />
2<br />
3<br />
( 1,0,0<br />
) = a , a = ( 0,1,0 ) = a , a = ( 0,0, ) a<br />
m<br />
k<br />
1<br />
=<br />
2<br />
3<br />
1<br />
a =<br />
Das ist toll!, denn es erspart uns ne Menge Rechenärger. D.h. alle die Rechenregeln <strong>und</strong><br />
Komponentendarstellungen werden uns erlassen. Und damit ist dies auch ein recht kurzer Abschnitt geworden.<br />
- 7 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
4. <strong>Transformation</strong><br />
Nun kommen wir aus der Theorie zum eigentlichen Thema. Da dies allerdings schon in der Vorlesung von Prof.<br />
Lotze des öfteren angeschnitten wurde, ist es hier nur knapp abgehandelt.<br />
Verschiebung<br />
Verschieben wir ein Koordinatensystem, so handelt es sich um einfache Verschiebung um den Vektor A . Das<br />
klingt recht einfach, bereitet aber in der Praxis oft Kopfzerbrechen, da die Verschiebung keine Lineare<br />
<strong>Transformation</strong> ist <strong>und</strong> sich mit den an<strong>deren</strong> oft nicht so gut verträgt (d.h. dir Hintereinanderausführung von<br />
Bezugssystemwechsel, Rotation <strong>und</strong> Verschiebung ist sehr rechenaufwendig.)<br />
Bezugssystemwechsel mittels vorgegebenen Basis-Vektoren<br />
Gesucht ist eine lineare Abbildung von einem System in das andere. Da dies bereits oben besprochen wurde,<br />
kommen hier nur noch ein paar zusammenfassende Hinweise:<br />
⎛ g11<br />
g12<br />
g13<br />
⎞<br />
⎜<br />
⎟<br />
f : A = ⎜ g21<br />
g22<br />
g23<br />
⎟<br />
⎜ g g g ⎟<br />
⎝ 31 32 33 ⎠<br />
Im Normalfalle ist also<br />
g<br />
g<br />
11<br />
11<br />
1 a′<br />
1a2a3<br />
= a′<br />
1<br />
∗ a =<br />
a a a<br />
= e′<br />
∗ e<br />
x<br />
x<br />
1<br />
= e′<br />
e<br />
x<br />
2<br />
im speziellen für Orthonormalsysteme:<br />
y<br />
e<br />
Eine für Physiker recht interessante Angelegenheit innerhalb der klassischen Mechanik ist die<br />
Galileitransformation, <strong>deren</strong> <strong>Transformation</strong>sschema folgendermaßen geschrieben werden kann. Aber Vorsicht,<br />
zur Zeit t=0s befinden sich beide Koordinatenursprungspunkte an dem selben Ort. D.h. es gibt keine zeitl.<br />
Unabhängige Verschiebung.<br />
×<br />
x′<br />
1<br />
x′<br />
2<br />
x′<br />
3<br />
t′<br />
Bezugssystemwechsel mittels vorgegebener Winkel<br />
x<br />
a<br />
a<br />
a<br />
1<br />
11<br />
21<br />
31<br />
0<br />
2 Dimensionen<br />
Mittels einfacher Überlegungen kann man im Normierten zweidimensionalen System das folgende<br />
Gleichungssystem aufstellen:<br />
x′<br />
=<br />
y′<br />
=<br />
3<br />
z<br />
x<br />
a<br />
a<br />
a<br />
2<br />
12<br />
22<br />
32<br />
0<br />
x<br />
a<br />
a<br />
a<br />
3<br />
13<br />
23<br />
33<br />
0<br />
t<br />
v1<br />
v2<br />
v3<br />
1<br />
( cosα<br />
⋅ x,sinα<br />
⋅ y)<br />
( − sinα<br />
⋅ x,cosα<br />
⋅ y)<br />
Als Randbemerkung: Stellt man die Matrize auf <strong>und</strong> ist dessen Determinante gleich 1, so handelt es sich um eine<br />
Rotationsmatix wie in diesem Falle:<br />
cosα<br />
sinα<br />
− sinα<br />
= 1<br />
cosα<br />
3 Dimensionen<br />
Bei drei Dimensionen besteht der Trick, die Rotation in zwei Teilrotationen in zwei Ebenen zu zerlegen <strong>und</strong><br />
diese dann per Komposition wieder zu verbinden. Das funktioniert, da sich jede beliebige dreidimensionale<br />
Drehung mit zwei linear unabhängig orientierten Winkeln beschreiben lässt.<br />
- 8 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Bezugssystemwechsel KKS – SKS<br />
Da wie gesagt dazu schon in den Vorlesungen von Prof. Lotze genügend Worte gefallen sind, gebe ich jetzt hier<br />
nur noch die der Übersicht halber die Formeln:<br />
Polabstandssystem<br />
ϑ Polabstand,<br />
ϕ Länge, r Radius<br />
Spiegelung<br />
x = r sinϑ<br />
cosϕ<br />
y = r sinϑ<br />
sinϕ<br />
z = r cosϑ<br />
x = r cosϑ<br />
cosϕ<br />
y = r cosϑ<br />
sinϕ<br />
z = r sinϑ<br />
ϑ<br />
Breitensystem<br />
Breite, ϕ Länge, r Radius<br />
r =<br />
x<br />
2<br />
+ y<br />
z<br />
ϑ = arccos<br />
r<br />
x<br />
ϕ = arccos<br />
r sinϑ<br />
r =<br />
x<br />
2<br />
+ y<br />
2<br />
+ z<br />
z<br />
ϑ = arcsin<br />
r<br />
x<br />
ϕ = arccos<br />
r cosϑ<br />
Zum Ausführen einer Spiegelung (an einer durch den Normalenvektor x n gegebenen Ebene) transformiert man<br />
sein System in ein orthonormiertes Koordinatensystem, in dem der Vektor x n die erste Koordinatenachse<br />
darstellt. Dann negiert man alle ersten Koordinaten <strong>und</strong> transformiert mit den Umkehrfunktionen wieder zurück.<br />
5. <strong>Effekte</strong> im bewegten KS<br />
Corioleskraft<br />
Dass es sich bei den <strong>Transformation</strong>en um ein mächtiges Werkzeug handelt, soll folgende,<br />
partiell angedeutete Herleitung der Corioleskraft zeigen:<br />
Umr<strong>und</strong>e ein Körper einen mit & URWLHUHQGHQ 3ODQHWHQ PLW GHU NRQVWDQWHQ<br />
:LQNHOJHVFKZLQGLJNHLW VR GDVV VHLQH %DKQ LKQ über beide Pole führt.<br />
Wir setzen, da die Lage des Körpers bis auf den Startwert eindeutig im geographischen<br />
System bestimmt ist, für beide gleichmäßigen Winkelgeschwindigkeiten:<br />
ϑ = µ ⋅t<br />
ϕ = ω ⋅t<br />
Dies kann man in das feste (für einen unbewegten Beobachter gültige) Kartesische<br />
Koordinatensystem transformiert werden.<br />
x = r cosϑ<br />
cosϕ<br />
= Rcosµ<br />
t cosωt<br />
y = r cosϑ<br />
sinϕ<br />
= Rcosµ<br />
t sinωt<br />
z = r sinϑ<br />
= Rsin<br />
µ t<br />
Dann schaut man sich an, welche „Kräfte“ scheinbar im bewegten System an den Körpern wirkt, in dem man<br />
mittels der 2. Ableitung die Beschleunigungen ausrechnet.<br />
<strong>und</strong> noch einmal differenziert:<br />
( − µ sin µ t cosωt<br />
−ω<br />
cosµ<br />
t sinω)<br />
( − µ sin µ t sinωt<br />
+ ω cosµ<br />
t cosωt)<br />
x<br />
= R<br />
y<br />
= R<br />
z<br />
= Rµ<br />
cosµ<br />
t<br />
2<br />
+ z<br />
2<br />
2<br />
- 9 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
2<br />
2<br />
( − µ cosµ<br />
t cosωt<br />
+ 2µϖ<br />
sin µ t sinϖt<br />
−ω<br />
cosµ<br />
t cosω)<br />
2<br />
2<br />
( − µ cosµ<br />
t sinωt<br />
− 2µϖ<br />
sin µ t cosϖt<br />
−ω<br />
cosµ<br />
t sinωt)<br />
x = R<br />
y = R<br />
2<br />
z = −Rµ<br />
sin µ t<br />
Das Alles schreit nun kräftig nach einer Analyse der Terme. Also nehmen wir die Gleichungen der<br />
Komponenten bezüglich der Faktoren der Summanden auseinander <strong>und</strong> interpretieren physikalisch:<br />
2<br />
x1<br />
= −Rµ<br />
cos µ t cosωt<br />
2<br />
y1<br />
= −Rµ<br />
cos µ t sinωt<br />
2<br />
z = −Rµ<br />
sin µ t<br />
1<br />
Kandidat eins sieht recht gewitzt nach einer Radialbeschleunigung aus, <strong>und</strong> zwar ist es die, die durch die Nord-<br />
Süd- Umr<strong>und</strong>ung provoziert wird. Das Minus dabei signalisiert, dass es sich um eine Beschleunigung zu einer<br />
Scheinkraft handelt, da nämlich im mitbewegten System eine Flucht nach Außen (Fliehkraft) beobachtet wird.<br />
x<br />
2<br />
2<br />
= −Rϖ<br />
2<br />
sin µ t cosωt<br />
2<br />
y2<br />
= −Rω<br />
sin µ t sinωt<br />
z = 0<br />
Ähnliches gilt für Kandidat zwei. Dieser ist der Radialkraft hervorgerufen durch die Eigenrotation des<br />
Mediumsystems (Planet). Setzt man übrigens R in & ein, so erhält man nicht anderes als die<br />
Tangentialbeschleunigung in Abhängigkeit vom Geschwindigkeitsvektors.<br />
x3<br />
= R ⋅ 2µω<br />
sin µ t sinϖt<br />
y3<br />
= −R<br />
⋅ 2µω<br />
sin µ t cosϖt<br />
z = 0<br />
3<br />
Leider haben wir da aber noch so einen Term, der uns aber irgendwie nicht so recht ins Konzept passen will. Wir<br />
EULQJHQ DOVR HUVW HLQPDO GDV 5 XQG GDV ]XVDPPHQ 'DPLW HQWVWHKW<br />
x<br />
3<br />
y<br />
3<br />
z<br />
3<br />
= 2v<br />
ω sin µ t sinϖt<br />
= −2v<br />
ω sin µ t cosϖt<br />
= 0<br />
K<br />
K<br />
Dabei ist v K die momentane Geschwindigkeit des Körpers (Betrag) <strong>und</strong> sin W GHU PRPHQWDQ HLQJHVFKORVVHQH<br />
Winkel zwischen v K <strong>und</strong> & Nun schauen wir noch mal auf die Gleichungen (<strong>und</strong> notfalls halten wir uns noch<br />
dazu ein Auge zu) <strong>und</strong> sehen, dass wir es mit einer zeitlich linearen Rotation zu tun haben. Rechnen wir diese<br />
heraus, so ergibt sich:<br />
x3<br />
= −2vKω<br />
sin µ t<br />
y3<br />
= −2vKω<br />
sin µ t<br />
z = 0<br />
3<br />
Das ist ja höchst interessant, da wir wissen, dass das Kreuzprodukt im Betrag gleich dem Produkt der<br />
Vektorbeträge multipliziert mit dem Sinus des eingeschlossenen Winkels ist:<br />
2 ⋅ v × ϖ = 2 ⋅ v ⋅ϖ<br />
⋅sinα<br />
Mit ähnlichen Überlegungen kann man auch die Herleitungen in alle an<strong>deren</strong> Richtungen (West-Ost <strong>und</strong> Auf-<br />
Absteigend) betrachten. Für uns soll das hier als pathologisches Beispiel genügen.<br />
Überschall<br />
Folgendes Problem: Ein Überschallflugzeug fliegt mit konstanter Geschwindigkeit <strong>und</strong> zieht einen Mach’schen<br />
Kegel hinter sich her. Nach welcher Flugdauer erfährt ein schlafender Physikstudent am Ort o, dass dieses<br />
Flugzeug den Luftraum über ihm durchkreuzte?<br />
Dazu habe das Flugzeug die Geschwindigkeit v = ( 1 1 0)c<br />
<strong>und</strong> sei bei t=0s im Koordinatenursprung.<br />
- 10 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Zuerst einmal eine kleine süße Skizze:<br />
Entnehmen kann man daraus, dass für v>c für den Öffnungswinkel des Kegels gilt:<br />
ct<br />
sinα =<br />
vt<br />
Nun konstruieren wir uns ein an das Flugzeug angehängtes Koordinatensystem. Dabei legen wir erst einmal den<br />
Geschwindigkeitsvektor auf die x-Achse (Rechenvorteile). Die an<strong>deren</strong> zwei Vektoren sollen den Kegel<br />
symbolisieren.<br />
D.h. in etwa so:<br />
Nun ist<br />
v = 2c<br />
.<br />
Nun gilt:<br />
Also ist unser Hilfskonstruktion:<br />
a<br />
a<br />
cosα<br />
=<br />
a<br />
2,3<br />
1<br />
x'<br />
cosα<br />
=<br />
a<br />
y'<br />
sinα<br />
=<br />
a<br />
, 2, 3 , 2, 3<br />
2<br />
2<br />
( 2 0 0 ),<br />
a = ( − 2 cos α 2 cosα<br />
sinα<br />
0 ),<br />
= ( 2 cos α 0 2 cosα<br />
sinα)<br />
= a<br />
1 2<br />
3<br />
−<br />
<strong>und</strong> diese rotieren wir fleißig in das Ausgangssystem. Es soll v ( 1 1 0)c<br />
muss wohl = 45°<br />
Es folgt:<br />
<strong>und</strong><br />
= sein, d.h. Der Rotationswinkel<br />
β sein (Kann man auch ausrechnen.) Wir setzen die Rotationsmatrix in der x-y- Ebene an.<br />
x1 = ( 1 1 0)c<br />
2<br />
2<br />
x2 = ( − 2 cos α ⋅cosβ<br />
− 2 cosα<br />
sinα<br />
sin β − 2 cos α sin β + 2 cosα<br />
sinα<br />
cosβ<br />
0)c<br />
2<br />
2<br />
x3 = ( − 2 cos α cosβ<br />
− 2 cos α sin β + 2 cosα<br />
sinα)c<br />
α = 45 ergibt sich:<br />
x1 = ( 1 1 0)c<br />
x2 = ( −1 0 0)c<br />
Mit einem errechneten °<br />
x<br />
3<br />
⎛<br />
= ⎜<br />
−<br />
⎝<br />
1<br />
2<br />
−<br />
1<br />
2<br />
2<br />
2<br />
⎞<br />
⎟<br />
c<br />
⎠<br />
Damit haben wir unsere Basen. Diese stecken wir in eine <strong>Transformation</strong>smatrix, welche jeden Vektor, welcher<br />
mit x 1 ,x 2 <strong>und</strong> x 3 beschrieben wurde in die Komponentendarstellung der Standartbasis überführt.<br />
Das aber möchten wir nicht wirklich, interessiert sind wir an der Inversenabbildung (also von der Standartbasis<br />
in unser Flugzeugkoordinatensystem).<br />
Nun könnten wir die Abbildungsmatrix aufschreiben (die Basisvektoren sektrecht) <strong>und</strong> dann die Inverse dazu<br />
bilden (Gauss? Nee, besser mit Cramer!) oder wir nutzen gleich das, was wir gelernt haben. Nämlich sind die<br />
kontravarianten Vektoren transponiert geschrieben gleich der Inversmatrix. (Die Begründung liegt darin, dass<br />
das Vektor- <strong>und</strong> Spatprodukt, was zur Bildung dieser Vektoren führt, eben aus einer Determinante entsteht.)<br />
- 11 -
Referat <strong>Koordinatensysteme</strong>, <strong>Transformation</strong>en <strong>und</strong> <strong>deren</strong> <strong>Effekte</strong> 23.04.2002<br />
Schnell aufgeschrieben sind die kontravarianten Brüder:<br />
Die gesuchte Matrix lautet also:<br />
1 ⎛ 1 ⎞<br />
x = ⎜0<br />
1 − 2⎟ c<br />
⎝ 2 ⎠<br />
2<br />
x = ( 1 −1<br />
0)c<br />
x<br />
3<br />
= ( 0 0 − 2)c<br />
⎛<br />
⎜0<br />
1<br />
⎜<br />
B = ⎜1<br />
−1<br />
⎜<br />
0 0<br />
⎝<br />
1 ⎞<br />
− 2 ⎟<br />
2 ⎟<br />
0 ⎟c<br />
− 2 ⎟<br />
⎠<br />
6. Literatur<br />
Siegfried Kästner, Vektoren, Tensoren, Spinoren,<br />
Akademieverlag Berlin 1960<br />
Prof. Arnold Sommerfeld, Theoretische Physik (Vorlesungen) Band I bis III,<br />
Verlag Harri Deutsch Frankfurt/M 1994<br />
Bronstein/ Semendjajew/ Musiol/ Mühlig, Taschenbuch der Mathematik,<br />
Verlag Harri Deutsch Frankfurt/M 2000<br />
Merzinger/ Wirth, Repetitorium der höheren Mathematik,<br />
Binomi- Verlag, 1994<br />
Gudrun Demmig, Matrizen <strong>und</strong> Determinanten,<br />
Nauheim : Demmig, 1994<br />
Internetadresse der<br />
NIMA- national imaging & mapping agency<br />
http://www.nima.mil/GandG/pubs.html<br />
Privatseite zum Thema Koordinatentransformation:<br />
http://www.cousin.de/jacobs/trafosys.html<br />
- 12 -