Anleitung - Hacker Brushless Motors
Anleitung - Hacker Brushless Motors
Anleitung - Hacker Brushless Motors

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
46<br />
4. 4.<br />
computer radio control system<br />
DE<br />
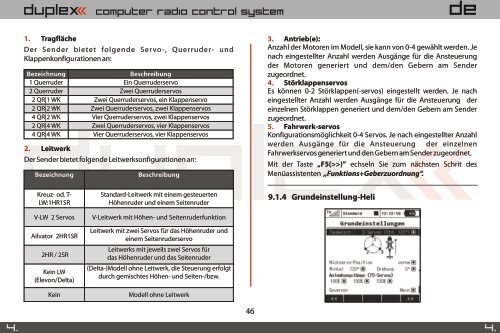
1. Tragfläche<br />
Der Sender bietet folgende Ser vo -, Querruder- und<br />
Klappenkonfigurationen an:<br />
Bezeichnung<br />
Beschreibung<br />
1 Querruder Ein Querruderservo<br />
2 Querruder Zwei Querruderservos<br />
2 QR|1 WK Zwei Querruderservos, ein Klappenservo<br />
2 QR|2 WK Zwei Querruderservos, zwei Klappenservos<br />
4 QR|2 WK Vier Querruderservos, zwei Klappenservos<br />
2 QR|4 WK Zwei Querruderservos, vier Klappenservos<br />
4 QR|4 WK Vier Querruderservos, vier Klappenservos<br />
2. Leitwerk<br />
Der Sender bietet folgende Leitwerksonfigurationen an:<br />
Bezeichnung<br />
Beschreibung<br />
3. Antrieb(e):<br />
Anzahl der Motoren im Modell, sie kann von 0-4 gewählt werden. Je<br />
nach eingestellter Anzahl werden Ausgänge für die Ansteuerung<br />
der Motoren generiert und dem/den Gebern am Sender<br />
zugeordnet.<br />
4. Störklappenservos<br />
Es können 0-2 Störklappen(-servos) eingestellt werden. Je nach<br />
eingestellter Anzahl werden Ausgänge für die Ansteuerung der<br />
einzelnen Störklappen generiert und dem/den Gebern am Sender<br />
zugeordnet.<br />
5. Fahrwerk-servos<br />
Konfigurationsmöglichkeit 0-4 Servos. Je nach eingestellter Anzahl<br />
werden Ausgänge für die Ansteuerung der einzelnen<br />
Fahrwerkservos generiert und den Gebern am Sender zugeordnet.<br />
Mit der Taste „F5(>>)” echseln Sie zum nächsten Schrit des<br />
Menüassistenten „Funktions+Geberzuordnung“.<br />
Kreuz- od. T-<br />
LW:1HR1SR<br />
V-LW 2 Servos<br />
Ailvator 2HR1SR<br />
2HR / 2SR<br />
Kein LW<br />
(Elevon/Delta)<br />
Kein<br />
Standard-Leitwerk mit einem gesteuerten<br />
Höhenruder und einem Seitenruder<br />
V-Leitwerk mit Höhen- und Seitenruderfunktion<br />
Leitwerk mit zwei Servos für das Höhenruder und<br />
einem Seitenruderservo<br />
Leitwerks mit jeweils zwei Servos für<br />
das Höhenruder und das Seitenruder<br />
(Delta-)Modell ohne Leitwerk, die Steuerung erfolgt<br />
durch gemischtes Höhen- und Seiten-/bzw.<br />
Modell ohne Leitwerk<br />
9.1.4 Grundeinstellung-Heli