HLR 37 Hochleistungs- Drehstrom- Synchronmotoren - infra-antriebe
HLR 37 Hochleistungs- Drehstrom- Synchronmotoren - infra-antriebe
HLR 37 Hochleistungs- Drehstrom- Synchronmotoren - infra-antriebe

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Hochleistungs</strong>-<br />
<strong>Drehstrom</strong>-<br />
<strong>Synchronmotoren</strong><br />
mit permanentem Magnetfeld<br />
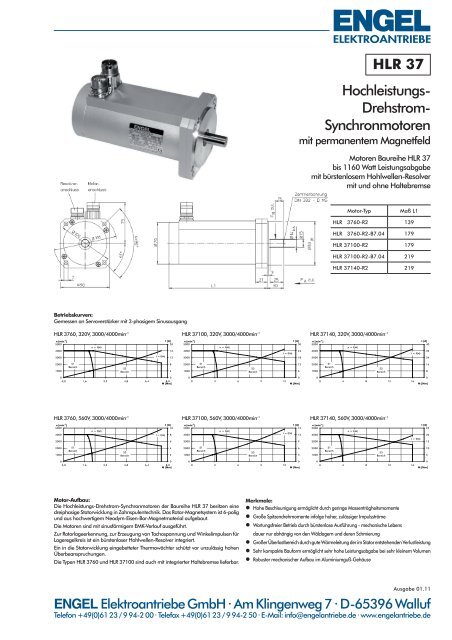
Motoren Baureihe <strong>HLR</strong> <strong>37</strong><br />
bis 1160 Watt Leistungsabgabe<br />
mit bürstenlosem Hohlwellen-Resolver<br />
mit und ohne Haltebremse<br />
Motor-Typ<br />
Maß L1<br />
<strong>HLR</strong> <strong>37</strong>60-R2 139<br />
<strong>HLR</strong> <strong>37</strong>60-R2-B7.04 179<br />
<strong>HLR</strong> <strong>37</strong>100-R2 179<br />
<strong>HLR</strong> <strong>37</strong>100-R2-B7.04 219<br />
<strong>HLR</strong> <strong>37</strong>140-R2 219<br />
<br />
Gemessen an Servoverstärker mit 3-phasigem Sinusausgang<br />
<strong>HLR</strong> <strong>37</strong>60, 320V, 3000/4000min -1 <strong>HLR</strong> <strong>37</strong>100, 320V, 3000/4000min -1 <strong>HLR</strong> <strong>37</strong>140, 320V, 3000/4000min -1<br />
n [min -1 ]<br />
5000<br />
n = f(M)<br />
I [A]<br />
20<br />
n [min -1 ]<br />
5000<br />
n = f(M)<br />
I [A]<br />
30<br />
n [min -1 ]<br />
5000<br />
n = f(M)<br />
I [A]<br />
40<br />
4000<br />
3000<br />
I = f(M)<br />
16<br />
12<br />
4000<br />
3000<br />
I = f(M)<br />
24<br />
18<br />
4000<br />
3000<br />
I = f(M)<br />
32<br />
24<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
8<br />
4<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
12<br />
6<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
16<br />
8<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0,0 1,6 3,2 4,8 6,4 8,0<br />
M [Nm]<br />
0 3 6 9 12<br />
M [Nm]<br />
0 4 8 12 16<br />
M [Nm]<br />
<strong>HLR</strong> <strong>37</strong>60, 560V, 3000/4000min -1 <strong>HLR</strong> <strong>37</strong>100, 560V, 3000/4000min -1 <strong>HLR</strong> <strong>37</strong>140, 560V, 3000/4000min -1<br />
n [min -1 ]<br />
5000<br />
4000<br />
n = f(M)<br />
I [A]<br />
10<br />
I = f(M) 8<br />
n [min -1 ]<br />
5000<br />
4000<br />
n = f(M)<br />
I [A]<br />
15<br />
I = f(M)<br />
12<br />
n [min -1 ]<br />
5000<br />
4000<br />
n = f(M)<br />
I [A]<br />
25<br />
20<br />
3000<br />
6<br />
3000<br />
9<br />
3000<br />
I = f(M)<br />
15<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
4<br />
2<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
6<br />
3<br />
2000<br />
1000<br />
S1<br />
Bereich<br />
S3<br />
Bereich<br />
10<br />
5<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0,0 1,6 3,2 4,8 6,4 8,0<br />
M [Nm]<br />
0 3 6 9 12<br />
M [Nm]<br />
0 4 8 12 16<br />
M [Nm]<br />
<br />
Die <strong>Hochleistungs</strong>-<strong>Drehstrom</strong>-<strong>Synchronmotoren</strong> der Baureihe <strong>HLR</strong> <strong>37</strong> besitzen eine<br />
dreiphasige Statorwicklung in Zahnspulentechnik. Das Rotor-Magnetsystem ist 6-polig<br />
und aus hochwertigem Neodym-Eisen-Bor-Magnetmaterial aufgebaut.<br />
Die Motoren sind mit sinusförmigem EMK-Verlauf ausgeführt.<br />
Zur Rotorlageerkennung, zur Erzeugung von Tachospannung und Winkelimpulsen für<br />
Lageregelkreis ist ein bürstenloser Hohlwellen-Resolver integriert.<br />
Ein in die Statorwicklung eingebetteter Thermowächter schützt vor unzulässig hohen<br />
Überbeanspruchungen.<br />
Die Typen <strong>HLR</strong> <strong>37</strong>60 und <strong>HLR</strong> <strong>37</strong>100 sind auch mit integrierter Haltebremse lieferbar.<br />
<br />
• Hohe Beschleunigung ermöglicht durch geringe Massenträgheitsmomente<br />
• Große Spitzendrehmomente infolge hoher, zulässiger Impulsströme<br />
• Wartungsfreier Betrieb durch bürstenlose Ausführung - mechanische Lebens<br />
dauer nur abhängig von den Wälzlagern und deren Schmierung<br />
• Großer Überlastbereich durch gute Wärmeleitung der im Stator entstehenden Verlustleistung<br />
• Sehr kompakte Bauform ermöglicht sehr hohe Leistungsabgabe bei sehr kleinem Volumen<br />
• Robuster mechanischer Aufbau im Aluminiumguß-Gehäuse<br />
Ausgabe 01.11<br />
Elektro<strong>antriebe</strong> GmbH · Am Klingenweg 7 · D-65396 Walluf<br />
Telefon +49(0)61 23 / 9 94-2 00 · Telefax +49(0)61 23 / 9 94-2 50 · E-Mail: info@engel<strong>antriebe</strong>.de · www.engel<strong>antriebe</strong>.de
Typ <br />
Serie - - -<br />
Max. Drehzahl min -1 4000 4000 4000 4000 4000 4000<br />
Zwischenkreisspannung V 320 560 320 560 320 560<br />
Nenndrehzahl min -1 3000 3000 3000 3000 3000 3000<br />
Nennstrom 1) ** ) A 4,1 2,3 5,8 3,2 7,1 3,9<br />
Nennstrom, effektiv A 2,9 1,65 4,1 2,25 5 2,75<br />
Nennleistung 2) W 660 630 940 910 1160 1130<br />
Betriebsart nach VDE 0530 S1 S1 S1<br />
Schutzart nach VDE 0530 IP 54 IP 54 IP 54<br />
Drehrichtung reversibel reversibel reversibel<br />
Bauform nach VDE 0530 IM B5 - mit Lagerschildzentrierung IM B5 - mit Lagerschildzentrierung IM B5 - mit Lagerschildzentrierung<br />
Anschlußart Steckverbindung (siehe unten) Steckverbindung (siehe unten) Steckverbindung (siehe unten)<br />
<br />
Massenträgheitsmoment Motor kgm 2 0,065*10 -3 0,106*10 -3 0,14*10 -3<br />
Massenträgheitsmoment Resolver kgm 2 0,0025*10 -3 0,0025*10 -3 0,0025*10 -3<br />
Nenndrehmoment 2) Nm 2,1 2 3 2,9 3,7 3,6<br />
Max. Dauerdrehmoment im Stillstand 2) Nm 2,3 2,2 3,3 3,2 4 3,9<br />
Spitzenmoment Nm 7,5 7,5 12 12 16 16<br />
Drehzahländerung pro Moment N -1 cm -1 min -1 1,6 1,6 0,9 0,9 0,6 0,6<br />
Mechanische Zeitkonstante ms 1,2 1,3 1,1 1,1 1 1<br />
Reibungsmoment Nm 0,08 0,1 0,12<br />
Rotorgewicht Motor kg 0,57 0,86 1,1<br />
Rotorgewicht Resolver kg 0,04 0,04 0,04<br />
Motorgewicht incl. Resolver kg 2,45 3,4 4,35<br />
Kugellager A/B-Seite 6202/6201 6202/6201 6202/6201<br />
F R<br />
(Zulässige radiale Wellenbelastung) 3) N 150 150 150<br />
F A<br />
(Zulässige axiale Wellenbelastung) N 100 100 100<br />
<br />
Phasenzahl 3 3 3<br />
Polzahl 6 6 6<br />
Anschlußwiderstand 4) Ω 5,5 16 3 9,5 2 6,5<br />
Induktivität 4) mH 16,5 46 12 35 10 31<br />
Spannungskonstante 1) * ) V/1000 min -1 65 109 65 114 65 115<br />
Drehmomentkonstante 1) * ) Nm/A 0,538 0,902 0,538 0,943 0,538 0,951<br />
Strom bei Spitzenmoment 1) ** ) A 16 9,6 25,5 14,5 34 19,5<br />
Max. Spitzenstrom 1) 5) A 20 12 31 17,5 40 22,5<br />
Elektrische Zeitkonstante ms 3 2,9 4 3,7 5 4,8<br />
<br />
Max. Umgebungstemperatur °C 40 40 40<br />
Isolationsklasse nach VDE 0530 F F F<br />
Thermische Zeitkonstante min 18 25 30<br />
Temperaturanstieg ohne Kühlung K/W 0,75 0,65 0,55<br />
<br />
Typ <br />
Nennspannung V= 24 24 -<br />
Nennstrom A 0,55 0,55 -<br />
Statisches Bremsmoment Nm 3,5 3,5 -<br />
Massenträgheitsmoment kgm 2 0,018*10 -3 0,018*10 -3 -<br />
Motorgewicht inkl. Resolver und Haltebremse kg 2,9 3,85 -<br />
<br />
Motor-Flanschdose BEGA 178 NN 00 00 0011 000 (INTERNONTEC)<br />
Resolver-Flanschdose AEGA 113 NN 00 00 0012 000 (INTERCONTEC)<br />
* ) Toleranz - 10 %<br />
** ) Toleranz + 10 %<br />
1)<br />
Scheitelwert<br />
2)<br />
Werte gelten bei Motor-Montage an<br />
Anlageflächen aus Aluminium von mindestens<br />
0,15 m2 bei einer Mindestdicke von<br />
10 mm oder gleichwertiger Metallfläche.<br />
3)<br />
Mitte des Wellenzapfens.<br />
4)<br />
Gemessen zwischen zwei Phasen.<br />
5)<br />
Die angegebenen Werte gelten für den<br />
Einsatz im Temperaturbereich von 0 - 40 °C<br />
und dürfen nicht, auch nicht kurzzeitig,<br />
überschritten werden, da sonst die Gefahr<br />
einer Magnetschwächung besteht.<br />
Konstruktionsänderung vorbehalten.