6 TM III Ãbung 11 & 12 - Institut für Robotik
6 TM III Ãbung 11 & 12 - Institut für Robotik
6 TM III Ãbung 11 & 12 - Institut für Robotik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
N<br />
<br />
UE Technische Mechanik 3 Übung <strong>11</strong> & <strong>12</strong><br />
6 <strong>TM</strong> <strong>III</strong> Übung <strong>11</strong> & <strong>12</strong><br />
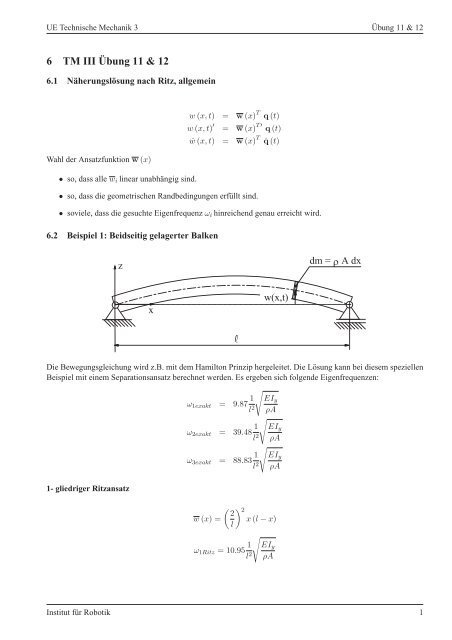
6.1 Näherungslösung nach Ritz, allgemein<br />
Wahl der Ansatzfunktion w (x)<br />
• so, dass alle w i linear unabhängig sind.<br />
w (x, t) = w (x) T q (t)<br />
w (x, t) ′ = w (x) T ′ q (t)<br />
ẇ (x, t) = w (x) T ˙q(t)<br />
• so, dass die geometrischen Randbedingungen erfüllt sind.<br />
• soviele, dass die gesuchte Eigenfrequenz ω i hinreichend genau erreicht wird.<br />
6.2 Beispiel 1: Beidseitig gelagerter Balken<br />
@ <br />
H ) @ N<br />
M N J <br />
Die Bewegungsgleichung wird z.B. mit dem Hamilton Prinzip hergeleitet. Die Lösung kann bei diesem speziellen<br />
Beispiel mit einem Separationsansatz berechnet werden. Es ergeben sich folgende Eigenfrequenzen:<br />
1- gliedriger Ritzansatz<br />
ω 1exakt<br />
ω 2exakt<br />
ω 3exakt<br />
= 9.87 1 l 2 √<br />
EI y<br />
ρA<br />
= 39.48 1 l 2 √<br />
EI y<br />
ρA<br />
= 88.83 1 l 2 √<br />
EI y<br />
ρA<br />
( ) 2 2<br />
w (x) = x(l − x)<br />
l<br />
√<br />
ω 1Ritz = 10.95 1 EI y<br />
l 2 ρA<br />
<strong>Institut</strong> für <strong>Robotik</strong> 1
UE Technische Mechanik 3 Übung <strong>11</strong> & <strong>12</strong><br />
2- gliedriger Ritzansatz<br />
(<br />
w (x) =<br />
[ 1<br />
M = ρAl 30<br />
Die Eigenfrequenzen berechnen sich aus:<br />
1<br />
105<br />
x(l−x)<br />
l 2<br />
1<br />
105<br />
1<br />
252<br />
x 3 (l−x)<br />
l 4<br />
) T<br />
]<br />
;K = EI y<br />
l 3 [ 4 2<br />
2<br />
24<br />
5<br />
]<br />
det [ −ω 2 M + K ] = 0<br />
Ergebnisse:<br />
ω 1Ritz<br />
ω 2Ritz<br />
√<br />
= 10.69 1 EI y<br />
l 2 ρA<br />
√<br />
= 56.57 1 EI y<br />
l 2 ρA<br />
3- gliedriger Ritzansatz<br />
M = ρAl ⎣<br />
Die Eigenfrequenzen berechnen sich aus:<br />
(<br />
w (x) =<br />
⎡<br />
1<br />
30<br />
1<br />
105<br />
1<br />
252<br />
1<br />
105<br />
1<br />
252<br />
1<br />
495<br />
x(l−x)<br />
l 2<br />
1<br />
252<br />
1<br />
495<br />
1<br />
898<br />
x 3 (l−x)<br />
l 4<br />
⎤<br />
⎦;K = EI y<br />
l 3<br />
x 5 (l−x)<br />
l 6<br />
⎡<br />
⎣<br />
) T<br />
4 2 2<br />
24<br />
2<br />
5<br />
30<br />
2<br />
7<br />
30<br />
7<br />
50<br />
7<br />
⎤<br />
⎦<br />
det [ −ω 2 M + K ] = 0<br />
Ergebnisse:<br />
ω 1Ritz<br />
ω 2Ritz<br />
ω 3Ritz<br />
= 10.36 1 l 2 √<br />
EI y<br />
ρA<br />
= 40.14 1 l 2 √<br />
EI y<br />
ρA<br />
= 181.46 1 l 2 √<br />
EI y<br />
ρA<br />
<strong>Institut</strong> für <strong>Robotik</strong> 2
UE Technische Mechanik 3 Übung <strong>11</strong> & <strong>12</strong><br />
6.3 Beispiel 2: Mittig federgelagerter Balken<br />
M(t)<br />
M(t)<br />
c<br />
A, , E, I<br />
w(x,t)<br />
z<br />
x<br />
z<br />
L<br />
L<br />
1- gliedriger Ritzansatz<br />
( x<br />
) 2<br />
w (x) =<br />
l<br />
Bewegungsgleichung:<br />
[ 1<br />
1<br />
M = 2ρAl 3<br />
1<br />
3<br />
1<br />
5<br />
] [ c 0<br />
;K =<br />
0<br />
Eigenfrequenzen für ρ = A = c = 1, l = 1 2 und EI y = 100:<br />
]<br />
8EI y<br />
;Q =<br />
l 3<br />
( 0<br />
4 M l<br />
)<br />
ω 1 = 0.999990 ω 2 = 268.3<br />
2- gliedriger Ritzansatz<br />
w (x) =<br />
( (x<br />
l<br />
) 2 ( x<br />
l<br />
) 4<br />
) T<br />
,qR (t) = ( q 1 (t) q 2 (t) ) T ,qmin = (z(t), q 1 (t), q 2 (t)) T<br />
w (x, t) = q 1 (t)x 2<br />
l 2 + q 2 (t)x 4<br />
l 4<br />
ẇ (x, t) = ( ˙q 1 (t))x 2<br />
l 2 + ( ˙q 2 (t)) x 4<br />
l 4<br />
Kinetische Energie:<br />
(ẇ (x, t)) 2 = ( ˙q 2 (t)) 2 x 8<br />
⎛<br />
Ir S = ⎝<br />
T = 1 2<br />
∫<br />
l 8 + 2 ( ˙q 1 (t))( ˙q 2 (t))x 6<br />
l 6 + ( ˙q 1 (t)) 2 x 4<br />
l 4<br />
x<br />
0<br />
z(t) + w(x, t)<br />
(B)<br />
⎞<br />
⎛<br />
⎠ , I v S = ⎝<br />
0<br />
0<br />
ż(t) + ẇ(x, t)<br />
IvS T Iv S dm = 1 ∫ l<br />
2 ρA (ż(t) + ẇ(x, t)) 2 dx<br />
−l<br />
⎞<br />
⎠<br />
<strong>Institut</strong> für <strong>Robotik</strong> 3
UE Technische Mechanik 3 Übung <strong>11</strong> & <strong>12</strong><br />
T<br />
= ρ A (ż (t)) 2 l + 1/2 ρ A<br />
= ρ A (ż (t)) 2 l + 1/2 ρ A<br />
+ρ Aż (t)<br />
= ρ Al<br />
∫ l<br />
−l<br />
∫ l<br />
−l<br />
∫ l<br />
−l<br />
∫ l<br />
(ẇ (x, t)) 2 dx + ρ Aż (t) ẇ (x, t)dx<br />
−l<br />
(<br />
)<br />
( ˙q 2 (t)) 2 x 8<br />
l 8 + 2 ( ˙q 1 (t)) ( ˙q 2 (t))x 6<br />
l 6 + ( ˙q 1 (t)) 2 x 4<br />
l 4 dx<br />
( ( ˙q1 (t))x 2<br />
l 2 + ( ˙q 2 (t)) x 4<br />
l 4 )<br />
dx<br />
(<br />
ż (t) 2 + 1 9 ˙q 2 (t) 2 + 2 7 ˙q 1 (t) ˙q 2 (t) + 1 5 ˙q 1 (t) 2 + 2 5 ˙q 2 (t)ż (t) + 2 3 ˙q 1 (t)ż (t)<br />
)<br />
⎛<br />
( ) ∂ T T<br />
= 2ρ Al ⎝<br />
∂ ˙q min<br />
ż(t) + 1 3 ˙q 1(t) + 1 5 ˙q 2(t)<br />
1<br />
3ż(t) + 1 5 ˙q 1(t) + 1 7 ˙q 2(t)<br />
1<br />
5ż(t) + 1 7 ˙q 1(t) + 1 9 ˙q 2(t)<br />
⎞<br />
⎠<br />
Potentielle Energie:<br />
( )<br />
d ∂ T T<br />
= 2ρ Al<br />
dt ∂ ˙q min<br />
⎛<br />
⎝<br />
¨z(t) + 1 3 ¨q 1(t) + 1 5 ¨q 2(t)<br />
1<br />
3 ¨z(t) + 1 5 ¨q 1(t) + 1 7 ¨q 2(t)<br />
1<br />
5 ¨z(t) + 1 7 ¨q 1(t) + 1 9 ¨q 2(t)<br />
⎞<br />
⎠,<br />
w (x, t) ′ = 2 q 1 (t)x<br />
l 2 + 4 q 2 (t)x 3<br />
l 4<br />
⎛<br />
( ) ∂ T T<br />
= ⎝<br />
∂ q min<br />
w (x, t) ′′ = 2 q 1 (t)<br />
l 2 + <strong>12</strong> q 2 (t)x 2<br />
l 4<br />
(w (x, t) ′′) 2 (q 1 (t)) 2<br />
= 4<br />
l 4 + 48 q 1 (t)q 2 (t)x 2<br />
l 6 + 144 (q 2 (t)) 2 x 4<br />
l 8<br />
0<br />
0<br />
0<br />
⎞<br />
⎠<br />
V = 1 2 EI y<br />
= 1 2 EI y<br />
= 1 2 EI y<br />
∫ l<br />
−l<br />
∫ l<br />
(<br />
−l<br />
(<br />
w (x, t) ′′) 2<br />
dx + 1/2 c (z (t))<br />
2<br />
(<br />
)<br />
4 (q 1 (t)) 2<br />
l 4 + 48 q 1 (t) q 2 (t)x 2<br />
l 6 + 144 (q 2 (t)) 2 x 4<br />
l 8 dx + 1/2 c (z (t)) 2<br />
8 (q 1 (t)) 2<br />
l 3<br />
)<br />
+ 32 q 1 (t) q 2 (t)<br />
l 3 + 288 (q 2 (t)) 2<br />
5 l 3 + 1/2 c (z (t)) 2<br />
Generalisierte Kraft Q:<br />
⎛<br />
0<br />
Iϕ = ⎜<br />
⎝ −2 q 1(t)x<br />
− 4 q 2(t)x 3<br />
l 2 l 4<br />
0<br />
⎛<br />
( ) ∂ V T<br />
⎜<br />
= ⎝<br />
∂ q min<br />
⎞<br />
⎟<br />
⎠ , ∂ I ϕ<br />
∂q min<br />
=<br />
Q = ∂ Iϕ<br />
∂q min<br />
∣ ∣∣∣<br />
T<br />
x=−l<br />
⎡<br />
⎢<br />
⎣<br />
8 E I y<br />
l<br />
16 E 3<br />
I y<br />
l 3<br />
⎞<br />
c z(t)<br />
16 E Iy ⎟<br />
q 1 (t) + q<br />
l 3 2 (t) ⎠<br />
288 E Iy<br />
q 1 (t) + q<br />
5 l 3 2 (t)<br />
0 0 0<br />
0 −2 x l 2 −4 x3<br />
l 4<br />
0 0 0<br />
M L + ∂ Iϕ<br />
∂q min<br />
∣ ∣∣∣<br />
T<br />
x=l<br />
⎤<br />
⎥<br />
⎦ ,M L =<br />
M R =<br />
⎛<br />
⎜<br />
⎝<br />
⎛<br />
⎝<br />
0<br />
4 M(t)<br />
l<br />
8 M(t)<br />
l<br />
0<br />
M(t)<br />
0<br />
⎞<br />
⎟<br />
⎠<br />
⎞<br />
⎛<br />
⎠,M R = ⎝<br />
0<br />
−M(t)<br />
0<br />
⎞<br />
⎠<br />
<strong>Institut</strong> für <strong>Robotik</strong> 4
UE Technische Mechanik 3 Übung <strong>11</strong> & <strong>12</strong><br />
Bewegungsgleichung:<br />
⎡<br />
M = 2ρAl ⎣<br />
1<br />
1<br />
3<br />
1 1<br />
3 5<br />
1 1<br />
5 7<br />
1<br />
5<br />
1<br />
7<br />
1<br />
9<br />
⎤<br />
⎦;K =<br />
Eigenfrequenzen für ρ = A = c = 1, l = 1 2 und EI y = 100:<br />
⎡<br />
⎢<br />
⎣<br />
c 0 0<br />
8EI<br />
0 y<br />
l 3 l<br />
16EI 3<br />
0 y<br />
16EI y<br />
288<br />
l 3 5<br />
EI y<br />
l 3<br />
⎤<br />
⎥<br />
⎦;Q =<br />
⎛<br />
⎝<br />
0<br />
4 M l<br />
8 M l<br />
⎞<br />
⎠<br />
ω 1 = 0.9977 ω 2 = 225.6 ω 3 = 2233.6<br />
6.4 Beispiel 3: Klausurbeispiel vom 29. 01. 1998<br />
F<br />
F<br />
a<br />
starr,<br />
masselos<br />
c<br />
x<br />
m<br />
z<br />
A, , E, I<br />
m<br />
L<br />
2 L<br />
1- gliedriger Ritzansatz<br />
w (x) = a 0 + a 1 x + a 2 x 2<br />
Bewegungsgleichung:<br />
Eigenfrequenz:<br />
( ) ( )<br />
46<br />
<strong>12</strong>8<br />
15 ρAL + 18m ¨q +<br />
L 3 EI + c q = −8 a L F<br />
ω =<br />
√<br />
<strong>12</strong>8<br />
46<br />
15<br />
EI + c<br />
L 3<br />
ρAL + 18m<br />
<strong>Institut</strong> für <strong>Robotik</strong> 5